

2010_03_КР ТеорМех
.pdf
|
n |
n |
|
|
|
|
|
|
|
|
|
æ |
см ö |
|||||
aабс X = -aотн + aпер |
+ aкор |
= -2,46 + 41+ 31,4 = 69,94 ç |
|
|
÷; |
|||||||||||||
c 2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|||||
aабсY = -aотнτ |
+ aперτ |
|
|
|
|
|
æсм ö |
|
|
|
||||||||
= -1,57 + 4,1 = 2,53 ç |
|
|
÷ . |
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
è c 2 |
ø |
|
|
|
||||
По теореме Пифагора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
æ см ö |
|
|||||
|
|
2 |
2 |
|
|
|
2 |
|
2 |
|
|
|
||||||
aабс = aабс Х + aабс Y = |
69,94 |
|
+ 2,53 |
|
= 69,99 |
ç |
|
|
÷ . |
|
||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
è c 2 |
ø |
|
||||
|
æ |
см ö |
æсм ö |
|||
ОТВЕТ: |
vабс = 28,35 ç |
|
÷, |
aабс = 69,99 ç |
|
÷ |
|
|
|||||
|
è |
c ø |
è c 2 |
ø |
||
Задача Д1. Динамика точки.
Условие. Тело S, рассматриваемое как материальная точка массы m, движется по шероховатой поверхности из состояния покоя от точки А к точке В, в которой отрывается от поверхности и продолжает движение до точки К. На участке АВ, коэффициент трения на котором равен f, на тело действует постоянная сила Q . Используя уравнение движения тела на участках АВ, ВК, основные теоремы
динамики точки определить время движения от начального к конечному положению, т.е. от точки А к точке К, скорость тела в точке В, расстояние DК.
Таблица данных к заданию Д1
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
m[кг] |
5 |
7 |
8 |
6 |
4 |
2 |
9 |
4 |
3 |
5 |
Q [H] |
100 |
50 |
120 |
110 |
130 |
40 |
120 |
30 |
100 |
60 |
AB[м] |
0,5 |
1 |
1,5 |
0,5 |
1 |
1,5 |
0,5 |
1 |
1,5 |
0,5 |
BD[м] |
2 |
3 |
4 |
5 |
2 |
3 |
4 |
5 |
2 |
3 |
ϕ0 |
60 |
120 |
30 |
90 |
45 |
150 |
0 |
135 |
30 |
180 |
α 0 |
30 |
45 |
60 |
30 |
45 |
30 |
60 |
45 |
30 |
45 |
β 0 |
45 |
30 |
30 |
60 |
45 |
45 |
30 |
60 |
60 |
60 |
f |
0,1 |
0,2 |
0,25 |
0,1 |
0,2 |
0,05 |
0,2 |
0,1 |
0,05 |
0,1 |
31

Рисунки к задаче Д1
Q |
Q |
B |
|
φ |
|
|
|
|
φ |
|
|
|
α |
|
|
A |
α |
|
|
|
|
K |
|
B |
|
A |
|
||||
|
|
|
|||||
|
|
|
|
|
VА=60м/с |
|
|
|
|
|
|
|
ВС=5м |
|
|
|
|
D |
K |
|
СD=7м |
C |
D |
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д1.0 |
|
|
|
Рис. Д1.1 |
|
|
Q |
VА=10м/с |
|
VА=50м/с B |
|
||
|
|
|
|
|
|
|
|
|
φ |
B |
|
Q |
φ |
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
α |
K |
|
α |
β |
|
|
|
|
|
A |
D |
|
|
D
|
|
Рис. Д1.2 |
Рис. Д1.3 |
Q |
|
|
Q |
φ |
|
B |
VА=10м/с |
|
A |
φ |
B |
|
|
|
VА=20м/с |
A |
|
ВС=10м |
K |
|
СD=15м |
|
|
C |
D |
D |
α |
K |
|
|
|
||
|
|
|
|
|
Рис. Д1.4 |
|
Рис. Д1.5 |
|
|
32

|
|
B |
VА=30м/с |
|
|
BD |
VА=40м/с |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
β |
|
Q |
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Q φ |
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
A |
α |
|
D |
K |
|
|
|
|
|
|
|
|
|
|
A |
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д1.6 |
|
|
|
|
Рис. Д1.7 |
|
|
|
|
|
Q |
A |
|
|
Q |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
φ |
|
|
|
|
|
|
φ |
|
A |
|
B D |
|
|
|
|
|
|
|
|
|
|||
|
|
|
α |
|
|
|
|
β |
|
|
|
B |
|
|
VА=12м/с |
|
|||
|
|
|
|
|
K |
||||
|
|
|
|
|
|
|
|
||
K |
|
|
|
|
|
|
|
|
|
|
|
Рис. Д1.8 |
|
|
|
|
Рис. Д1.9 |
|
|
Пример Д1. |
|
|
|
|
|
|
|
|
|
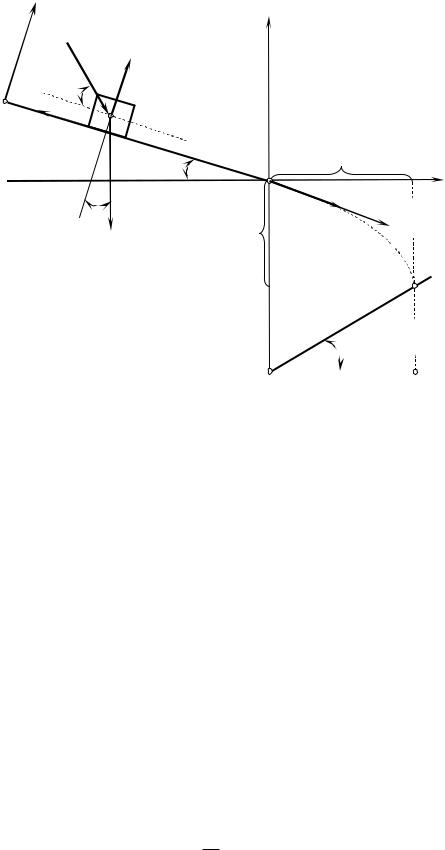
Дано: АВ=5 м, ВD=7 м, Q =100 Н, f =0,1, α=60о, β=30о, φ=45о, m=10 кг.
Определить: VB , tAB , tBK , DK.
Решение. I. Рассмотрим движение тела на участке АВ. Выберем систему координат х1Ау1, как показано на рис. Д1. Изобразим в произвольный момент времени тело S и действующие на него силы. Запишем основное уравнение динамики для движущегося тела S, считая его материальной точкой.
|
|
|
|
|
|
|
|
|
|
ma = å |
|
|
(1) |
где å |
Fk , |
||||||||||||
Fk = P + Q + N + Fтр . |
|
||||||||||||
Спроектируем обе части равенства (1) на ось Ах1. |
|
||||||||||||
Имеем: |
(2) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
mх = P sinα + Q cosϕ − Fтр |
|||
&& |
|
|
|
||||||||||
где Fтр = fN .
33
у1 |
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
F |
тр |
|
|
|
|
|
|
|
|
|
|
|
|
хк |
|
|
|
||||
|
|
|
|
|
|
|
|
|
α |
|
|
|
B |
х |
|
|||||||
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
V в |
|
||||||||
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ук |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
β |
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д1 |
|
|
|
|
|
|
||||
Для определения N спроектируем (1) на ось Ау1, учитывая, что &у& = 0 , по- |
||||||||||||||||||||||
лучим |
- P cosα - Q sinϕ + N = 0 , |
|
(3) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
N = P cosα + Qsinϕ = 10 × 9,8 ×0,5 + 100 × 0,7 = 119Н , |
(4) |
|||||||||||||||||||
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Fтр = fN = 0,1×119 = 11,9Н |
|
|
|
|
|
|||||||||||||
mх = P sinα + Q cosϕ - Fтр = 10 × 0,87 + 100× 0,7 - 11,9 = 145,1Н (5) |
|
|||||||||||||||||||||
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
&& |
|
|
145,1 |
|
145,1 |
|
|
2 |
|
|
|
|
|
|||||||||
|
|
|
|
х |
= |
|
|
|
|
= |
|
|
= 14,5 м / с |
|
. |
|
|
|
||||
|
m |
10 |
|
|
|
|
||||||||||||||||
Таким образом, мы определили ускорение груза на участке АВ. Интегрируя последнее дифференциальное уравнение дважды, получаем:
х& = 14,5t + C1 ,
х& = 14,5 t 2 + C1t + C2 , 2
где С1 и С2 – постоянные интегрирования. Для их определения введем начальные условия: при t=0, x = 0 , x& = 0 . Подставляя эти начальные условия в два последних уравнения, получаем С1 =0; С2=0.
34

Переписываем два последних уравнения с учетом С1 и С2 и получаем:
|
|
|
|
|
|
|
х = 14,5t - закон изменения скорости груза на участке АВ, |
(6) |
||||||||||||||||||||||||||||||||||
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
& |
|
|
|
t 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
= 14,5 2 - закон движения груза на участке АВ. |
|
(7) |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
х |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из (7) имеем AB = 14,5 |
AB |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tAB |
= |
|
|
|
|
2 × AB |
= |
|
2×5 |
|
= 0,8с |
|
(8) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14,5 |
14,5 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
Определим скорость тела S в точке В. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
Из (6) имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
х& = 14,5tBK = 14,5 ×0,83 = 12м / с |
|
(9) |
||||||||||||||||||||||||||||
II. Для проверки результатов используем теорему об изменении кинетической |
||||||||||||||||||||||||||||||||||||||||||
энергии материальной точки и теорему об изменении количества движения. |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mVB2 |
- |
mVA2 |
= |
|
å A( |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fk ), |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
VA = 0 , |
|
|
|
|
|
|
|||||||||
т.к. по |
условию задачи |
скорость |
|
|
|
то теорема |
примет |
вид |
||||||||||||||||||||||||||||||||||
|
mVB2 |
= å A( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Fk ), откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2×å A( |
|
|
|
) |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VB = |
Fk |
. |
|
|
(10) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Определим сумму работ всех сил, действующих на движущееся тело на |
|||||||||||||||||||||||||||||||||||
участке АВ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
A( |
|
|
|
|
) = Q × AB ×cosϕ = 100×5 ×0,7 = 350 Дж; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Q |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
A( |
|
|
|
) = P × AB ×sinα = 10 ×9,8 ×5 ×0,87 = 426,3 Дж; |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
P |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
A( |
|
тр ) = Fтр × AB × cos180 = -11,9 ×5 = -59,5 Дж. |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
F |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Тогда из (10) имеем VB = |
2 ×å A( |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Fk ) |
= |
2 ×( 350 + 426,3 - 59,5 ) |
= 12м / с . |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Сравнивая полученное значение скорости с (9) убеждаемся в том, что она найдена верно.
mV B - mV A = å Fkx × t AB , |
(11) |
т.к. условию задачи скорость VA = 0 , то теорема примет вид mVB = åFkx ×tAB ,
откуда t |
|
= |
mVB |
= |
10×12 |
= 0,8с. |
|
AB |
åFkx |
145,1 |
|||||
|
|
|
|
Сравнивая полученное значение времени с (8) убеждаемся в том, что она найдена верно.
35

III. Рассмотрим движение тела на участке ВК. Систему координат (xВy) расположим так, как показано на рисунке. Запишем уравнения движения тела S на участке ВК.
ìmx = |
F |
= 0 |
||
ï |
&& |
|
å ix |
|
í |
&& |
= |
F |
= mg. |
ïmy |
||||
î |
|
|
å iy |
|
Разделим обе части двух уравнений на массу, получим
ì&x& = 0
íî&y& = g.
Дважды интегрируя полученную систему уравнений, имеем
|
& |
= C1 |
|
ìx = C1t + C3 |
|
||
ìx |
|
ï |
gt2 |
|
(11) |
||
í |
|
|
+ C2 . |
í |
+ C2t + C4 . |
||
îy = gt |
ïy = |
|
|
||||
|
& |
|
|
î |
2 |
|
|
|
|
|
|
|
|
||
Для определения констант С1, С2, С3 и С4 введем начальные условия на участке ВК: при t = 0, x = 0 , у=0, x& = VB cosα , y& = VB sinα . Подставляя их в системы
уравнений (11), получим:
C1 = VB cosα , C2 = VB sinα , C3 = 0 , C4 = 0 .
С учетом этих значений, законы движения точки будут иметь вид:
ìx = tVB cosα
ï
íïy = gt2 (12)
î 2
Точка на рисунке - точка падения тела S. Из рисунка видно, что |
|
||||||||
|
|
|
|
yK = BD - KE , т.к. KE = xk ×tgβ , |
(13) |
||||
где хК, yК – координаты точки К. |
|
|
|
||||||
Определим время полета тела на участке ВК. |
|
|
|||||||
Из (12) имеем: |
|
|
|
|
|
|
|
||
|
gt 2 |
|
+ tVB sinα = BD - tVB cosα ×tgβ |
|
(14) |
||||
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
||
4,9tBK2 + tBK ×12×0,87 = 7 - tBK ×12×0,5×0,57 |
|
||||||||
|
|
|
|
|
4,9tBK2 + 13,9tBK -7 = 0. |
|
(15) |
||
Решая (15), находим tВК = 0,4 с. |
|
|
|
||||||
Определим расстояние DK. Из рисунка видно, что |
|
|
|||||||
DK = |
|
xk |
= |
tBKVB cosα |
= 0,4×12×0,5 |
= 2,8м. |
|
||
|
cos β |
cos β |
|
||||||
|
|
|
|
|
0,87 |
|
|
||
Ответ: VB = 12м / с , tAB = 0,8с , tBK = 0,4с , DK=2,8м.
36

Задача Д2. Теорема о движении центра масс системы. Теорема об изменении кинетической энергии системы.
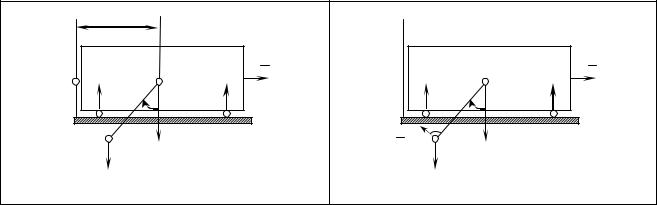
Условие. Механическая система состоит из прямоугольной вертикальной плиты 1 массой m1 =18кг, движущейся вдоль горизонтальных направляющих, и груза D массой m2=6 кг (рис. Д2.0–Д2.9, табл. Д2). В момент времени t0=0, когда скорость плиты u0=2 м/с, груз под действием внутренних сил начинает двигаться по желобу плиты.
На рис. 0–3 желоб КЕ прямолинейный и при движении груза расстояние s=AD изменяется по закону s=f(t), а на рис. 4–9 желоб – окружность радиуса R=0,8 м и при движении груза угол φ= Ð АС1D изменяется по закону φ=f2(t). В табл. Д5 эти зависимости даны отдельно для рис. 0 и 1, для рис. 2 и 3 и т. д., где s выражено в метрах, φ – в радианах, t – в секундах.
На всех рисунках груз D показан в положении, при котором s>0 (или φ>0); при s<0 (или φ<0) груз находится по другую сторону от точки А.
Считая груз материальной точкой и пренебрегая всеми сопротивлениями, определить величину, указанную в таблице в столбце «Найти», где обозначено: х1 – перемещение плиты за время от t0=0 до t1=1с; u1, a1, N1 – значения в момент времени t1=1с скорости плиты, ускорения плиты и полной нормальной реакции направляющих соответственно.
Указания. Задача Д2 на применение теорем о движении центра, масс и об изменении количества движения системы. Первой теоремой удобнее пользоваться, когда надо найти перемещение или закон движения одного из тел системы, движущегося поступательно, а второй — когда надо найти скорость такого тела. При определении ускорения тела или реакции связи тоже удобнее воспользоваться первой теоремой.
Рисунки к заданию Д2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
K |
|
|
|
|
|
|
|
A |
300 |
|
|
u |
|
|
300 |
A |
|
|
u |
|
|
|
|
|
|
|
|
|
|||||
|
|
D |
|
|
|
|
|
|
|
D |
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
E |
|
|
1 |
|
|
|
|
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д 2.0 |
|
|
|
Рис. Д 2.1 |
|
|
|
||||
37

D |
E |
E |
D |
|
u |
|
|
600 |
u |
600 |
|
||
A |
|
A |
|
|||
K |
|
1 |
|
|
K |
1 |
Рис. Д 2.2 |
|
Рис. Д 2.3 |
|
|||
|
D |
u |
D |
|
u |
|
|
φ |
|
φ |
|
||
C1 |
A |
A |
C1 |
|
||
R |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
Рис. Д 2.4 |
|
Рис. Д 2.5 |
|
|||
A φ |
D |
u |
|
R |
|
u |
C1 |
|
|
|
C1 |
|
|
R |
|
|
|
φ |
A |
|
|
|
D |
|
|||
|
|
1 |
1 |
|||
|
|
|
||||
Рис. Д 2.6 |
|
Рис. Д 2.7 |
|
|||
|
|
u |
D |
φ |
A |
u |
A R C1 |
|
|
||||
|
|
|
|
|
|
|
φ |
|
|
|
R |
C1 |
|
D |
|
1 |
|
|
1 |
|
|
|
|
|
|||
Рис. Д 2.8 |
|
Рис. Д 2.9 |
|
|||
38

Таблица Д2
Номер |
|
|
|
|
s=f1(t) |
|
|
|
|
|
|
|
|
|
|
|
φ=f2(t) |
|
|
|
|
|
Найти |
||||||
условия |
|
|
|
|
|
|
|
||||||||||||||||||||||
Рис. 0,1 |
|
Рис. 2,3 |
|
Рис. 4,5 |
Рис. 6,7 |
Рис. 8,9 |
|||||||||||||||||||||||
0 |
0,4( 2t2 -1) |
0,2(1 -3t2 ) |
π |
( 3 - 2t2 ) |
π |
( 1- 3t2 ) |
π |
( 1- 4t2 ) |
х1 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
3 |
|
|
|
|
1 |
æ π |
|
|
|
ö |
æ π |
t2 |
ö |
π |
( t2 + 1) |
π |
( t |
2 - 3 ) |
|
π t2 |
u1 |
|||||||||||||
0,8 cosç |
6 |
|
t2 ÷ |
0,4 sinç |
|
÷ |
3 |
6 |
|
||||||||||||||||||||
|
è |
|
|
|
ø |
è 3 |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
0,2 cos(πt2 ) |
æ |
π |
|
|
t |
ö |
π |
( 1+ 2t2 ) |
|
π |
t2 |
|
|
|
π ( 2 - t2 ) |
a1 |
||||||||||||
1,8 cosç |
3 |
|
|
÷ |
6 |
|
2 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
è |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
0,5( 2 - 3t2 ) |
0,3( 6t2 - 5 ) |
π |
( 1- 3t2 ) |
π |
( 3 - 4t2 ) |
π |
( 5t2 -1) |
х1 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
6 |
|
|
|
|
|
4 |
|
|
|
|
4 |
æ π |
t2 |
ö |
æ π |
|
|
|
ö |
π |
( t2 - 2 ) |
π ( 2t2 -1) |
π |
( 4t2 -1) |
N1 |
|||||||||||||||
0,8 sinç |
2 |
÷ |
0,4 cosç |
2 |
|
t2 ÷ |
2 |
6 |
|||||||||||||||||||||
|
è |
|
|
|
ø |
è |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
5 |
æ π |
|
|
t |
ö |
æ π |
t |
2 |
ö |
π |
( t |
2 |
+ 3 ) |
π |
( 5 -t |
2 |
) |
π |
( t |
2 |
+ 2 ) |
u1 |
|||||||
0,6 cosç |
|
|
÷ |
1,2 sinç |
|
|
÷ |
3 |
|
6 |
|
|
4 |
|
|||||||||||||||
|
è 3 |
|
|
ø |
è 6 |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
6 |
0,2( 4 -7t2 ) |
0,6( 1- 2t2 ) |
π |
( 3 + 4t2 ) |
|
π |
t2 |
|
|
|
π |
( 3t2 -1) |
х1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
3 |
|
|
|
|
6 |
|
|
|
|
7 |
æ π |
|
|
|
ö |
0,6 sin(πt2 ) |
π |
( t2 - 4 ) |
π |
( 5 |
- 3t2 ) |
π |
( t2 + 1) |
a1 |
|||||||||||||||
1,2cosç |
2 |
|
t2 ÷ |
3 |
4 |
2 |
|||||||||||||||||||||||
|
è |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
8 |
0,5 sin(πt2 ) |
æ |
π |
|
|
t |
ö |
π |
( t2 + 2 ) |
π |
( t2 + 1) |
|
π t2 |
N1 |
|||||||||||||||
1,8 cosç |
6 |
|
|
÷ |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
è |
|
|
|
ø |
6 |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
9 |
æ π |
t |
2 |
ö |
æ |
π |
|
|
t |
ö |
π |
( 2 - t |
2 |
) |
π |
( 1 |
- 5t |
2 |
) |
π |
( t |
2 |
+ 3 ) |
u1 |
|||||
1,2 sinç |
4 |
|
÷ |
0,8 cosç |
4 |
|
÷ |
4 |
|
6 |
|
3 |
|
||||||||||||||||
|
è |
|
|
|
ø |
è |
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Пример Д5. В центре тяжести А тележки массой m1, движущейся по гладкой горизонтальной плоскости, укреплен невесомый стержень AD длиной l с грузом D массой m2 на конце (рис. Д2а). В момент времени t0=0, когда скорость тележки u0, стержень AD начинает вращаться вокруг оси А по закону φ=φ(t).
Дано: m1=24 кг, m2=12 кг, u0=0,5 м/с, l=0,6 м, φ=(π/3)(1+2t3) рад (t – в се-
кундах).
Определить в момент времени t1=1 с: а) перемещение х1 тележки (перемещение за время от t0=0 до t1=1с); б) ускорение а1 тележки; в) скорость u1 тележки; г) полную нормальную реакцию N1 плоскости.
Решение. Рассмотрим механическую систему, состоящую из тележки и груза D, в произвольном положении. Изобразим действующие на систему внешние силы: силы тяжести P1 и P2 и реакции плоскости N ¢ и N ¢¢ . Проведем координатные оси Оху так, чтобы ось у проходила через точку АО, где находился центр масс тележки в момент времени t0=0.
а) Определение перемещения х1. Для определения х1 воспользуемся теоремой о движении центра масс системы. Составим дифференциальное уравнение его движения в проекции на ось х. Получим
39
Mx&&C = åFkxe или Mx&&C = 0, |
(1) |
так как åFkxe = 0, поскольку все действующие на систему внешние силы вертикальны.
y |
x |
|
|
y |
|
|
A0 |
N ′′ |
A |
u |
N ′′ |
A |
u |
|
φ |
N′ |
φ |
N′ |
||
O |
|
|
O |
|
||
|
|
|
|
|
D |
P1 |
v |
Dотн D P1 |
P2 |
|
|
P2 |
|
|
|
|
|
Рис. Д2.а |
|
Рис. Д2.б |
Определим значение MxC . Из рис. Д2,а видно, что в произвольный момент
времени абсциссы хА – центра масс тележки и хD – груза равны соответственно хА=х, хD=x–lsinφ. Так как по формуле, определяющей координату хС центра масс системы, MxC = m1xA + m2 xD , то
æ |
π |
|
2π |
|
3 |
ö |
|
MxC = m1 x + m2 x - m2l sinç |
|
+ |
|
t |
|
÷ . |
(2) |
3 |
3 |
|
|||||
è |
|
|
|
ø |
|
Теперь, проинтегрировав уравнение (1), |
найдем, что |
|
Mx&C = 0 |
; MxC = C1t + C2 , |
(3) |
Где С1 и С2 – постоянные интегрирования. Подставив во второе из этих уравнений значение MxC из равенства (2), получим
æ |
π |
|
2π |
|
3 |
ö |
|
|
m1 x + m2 x - m2l sinç |
|
+ |
|
t |
|
÷ |
= C1t + C2 . |
(4) |
3 |
3 |
|
||||||
è |
|
|
|
ø |
|
|
Для определения С1 и С2 понадобится еще одно уравнение, которое получим, продифференцировав обе части равенства (4) по времени:
& |
2 |
æ π |
|
2π |
|
3 |
ö |
|
|
|
|
cosç |
+ |
|
t |
|
÷ |
= C1 , |
(5) |
||
( m1 + m2 )x - 2m2lπt |
|
3 |
|
|||||||
|
|
è 3 |
|
|
|
ø |
|
|
|
|
где x = u – скорость тележки. По начальным условиям при t0=0 х=0, x& = u0 . |
|
|||||||||
& |
|
|
|
|
|
|
|
|
|
|
Подставляя эти величины в равенства (4) и (5), найдем, что |
æ π |
|
|
|||||||
C1 = ( m1 + m2 )u0 , |
|
|
|
|
|
|
|
ö |
|
|
|
C2 = -m2l sinç |
÷. |
|
|||||||
|
|
|
|
|
|
|
|
è 3 |
ø |
|
При этих значениях С1 и С2 уравнение (4) примет вид |
|
||||||||
æ |
π |
|
2π |
|
3 |
ö |
|
æπ |
ö |
m1 x + m2 x - m2l sinç |
|
+ |
|
t |
|
÷ |
= ( m1 + m2 |
)u0t - m2l sinç |
÷ . |
3 |
3 |
|
|||||||
è |
|
|
|
ø |
|
è 3 |
ø |
||
Отсюда получаем зависимость от времени координаты х, определяющей одновременно перемещение тележки:
40