

ортодонтия хорошилкина
.pdfактивной силой действия, но также силу отдачи, называемую силой противодействия, т. е. реактивной. Активная и реактивная силы могут быть направлены навстречу друг другу или в противоположные стороны, что зависит от конструкции ортодон-тического аппарата. Если эти силы развиваются в пределах одной челюсти, то такие аппараты оказывают одночелюстное действие. Наличие в конструкциях одночелюстных аппаратов наклонной плоскости и других приспособлений, передающих активную или реактивную силу на другую челюсть, позволяет выделить их в группу одночелюстных аппаратов межчелюстного действия. При двухчелюстном действии (дуговые аппараты Энгла с межчелюстной тягой, активатор Андрезена
— Хойпля и др.) активная сила передается на одну челюсть, а реактивная — на противоположную, что способствует исправлению аномалии прикуса. В случае применения внеротовых аппаратов активная сила воздействует на зубы и челюсть, реактивная — на опорные ткани головы или шеи.
Часть аппарата, перемещающая зубы, называется мобильной, другая, неподвижная часть — спорно-фиксирующей. По закону Ньютона эти силы равны, поэтому при конструировании аппаратов важно правильно выбрать опору. Различают два вида опоры: взаимодействующую (реципрокную) и стационарную. Взаимодействующей называется опора, при которой сила противодействия используется для лучшей фиксации аппарата и перемещения зубов, например опора и фиксация двух половин расширяющей пластинки при раскручивании винта. Стационарной является опора, при которой фиксирующая часть аппарата остается неподвижной и, следовательно, не вызывает смещения зубов. Увеличение опоры уменьшает силу противодействия, приходящуюся на каждый из опорных зубов, что обеспечивает неизменность их расположения. Например, дуга Энгла, прикрепленная ко всем зубам, представляет собой аппарат со стационарной опорой: при раскручивании гайки на одном конце дуги она перемещает дистально лишь один опорный зуб, в который упирается. При этом реактивная сила не вызывает перемещения остальных зубов.
При выборе конструкции аппарата с тем или иным видом опоры следует учитывать общее состояние пациента, стадию формирования прикуса, количество имеющихся зубов, их качество и состояние тканей пародонта.
В зависимости от места расположения аппаратов их называют внутриротовыми или внеротовыми. Аппараты с внутри-ротовой опорой могут находиться на небной или язычной. поверхности альвеолярных отростков, в области преддверия; полости рта, на отдельных зубах или зубных рядах, с внеро-| товой
опорой — в области верхней или нижней губы, подбо|
258
родка, углов нижней челюсти и опираться на голову (в лобной, теменной, затылочной области) или шею.
Другим важным моментом конструирования аппаратов является достижение их надежной фиксации, без которой невозможна полноценная передача активной и реактивной сил на перемещаемые и опорные зубы. По виду фиксации различают аппараты несъемные и съемные. В несъемных конструкциях имеются опорно-фиксирующие детали в виде колец, коронок или капп с припаянными или приваренными к ним трубками, винтами, рычагами, крючками, штангами, кнопками и различными замковыми приспособлениями. Кольца, коронки, каппы укрепляют на зубах с помощью висфатцемента и других материалов. Специальные стоматологические композиции, разработанные в последние годы, позволяют укреплять детали опорно-фиксирующих приспособлений непосредственно на эмали зубов без применения дополнительных колец или коронок. Такие детали служат для передачи на зубы давления, развиваемого назубными дугами, лигатурами, пружинами.
В ортодонтической практике широко применяют съемные конструкции аппаратов. Однако их надежной фиксации не всегда уделяется должное внимание. Иногда применяют бескламмер-ные пластиночные аппараты, которые плохо фиксируются в полости рта и смещаются в процессе их действия. Это приводит к удлинению срока лечения, необходимости удерживания аппарата языком, развитию вредной привычки неправильного расположения языка.
Для фиксации съемных аппаратов применяют механические приспособления: кламмеры, дуги, каппы, п слоты, зубонадес-невые накладки. Кроме того, используют анатомическую ретенцию, адгезию. Анатомическая ретенция достигается использованием формы скатов альвеолярных отростков, бугров верхней челюсти, свода неба, коронок зубов (особенно при их наклоне), промежутков межцу ними и др. Адгезия — силы сцепления, возникающие между двумя плотно соприкасающимися увлажненными поверхностями, например между слизистой оболочкой полости рта и ортодонтической пластинкой. Однако использование анатомической ретенции и адгезии недостаточно Для надежного укрепления съемных аппаратов. После активи-рования винта или растяжения расширяющей пружины площадь съемного расширяющего аппарата увеличивается. Рассчитывать на улучшение его фиксации в результате усиления Давления на зубы в отсутствие фиксирующих приспособлений не следует. Такой аппарат смещается в более широкую часть ^ода неба или в сторону дна полости рта, что уменьшает его Давление на альвеолярный отросток. В случаях резкого язычного наклона нижних боковых зубов бескламмерная пластинка сме-
•)*
259
щается в сторону дна полости рта и травмирует слизистую оболочку. Этого можно избежать путем применения фиксирующих приспособлений и изготовления пластинки, базис которой укорочен и прилегает только к коронкам зубов, подлежащих перемещению.
При использовании съемной пластинки для удлинения верхнего или нижнего зубного ряда без фиксирующих приспособлений после активирования винта или пружины площадь аппарата увеличивается Происходит смещение его бескламмер-ной опорной части в дистальном направлении, т е в сторону более широкой части зубного ряда, уменьшается давление на перемещаемые зубы и замедляется их перемещение. При пользовании съемной одночелюстной пластинкой межчелюстного действия в результате давления передними зубами на наклонную плоскость пластинка смещается кзади в более широкую часть зубной дуги и отстает от свода неба в дистальных участках. Применение фиксирующих приспособлений предотвращает такое смещение и обеспечивает надежную фиксацию аппарата.
Чтобы исправить аномальное положение зубов, следует освободить для них место в зубной дуге путем смещения соседних зубов, расширения или удлинения зубного ряда, удаления отдельных зубов по ортодонтическим показаниям Попытка исправить положение зуба, для которого нет места в зубном ряду или его недостаточно, может привести к осложнениям: кровоизлиянию в пульпе, изменению окраски коронки, возникновению травматического периодонтита, рассасыванию верхушки корня и др
В процессе перемещения отдельных зубов или их групп необходимо устранить препятствие на пути их перемещения, т е. разобщить по показаниям прикус, сошлифовать пластмассу аппарата, препятствующую перемещению зубов, и т д
10.2. Классификация ортодонтических аппаратов
Разнообразие зубочелюстных аномалий привело к появлению многочисленных ортодонтических аппаратов для их устранения. Нами суммированы и классифицированы основные конструкции аппаратов с учетом биофизических принципов их действия и конструктивных особенностей [Хорошилкина Ф Я., Малыгин Ю М., 1977] (рис. 10.1).
По принципу действия различают четыре группы аппаратов' механически-действующие, функционально - направляющие, функционально-действующие, сочетанного действия.
По способу и местудействия: одночелюстные, одночелюстные межчелюстного действия, двучелюстные, внеро-товые, сочетанные.
260
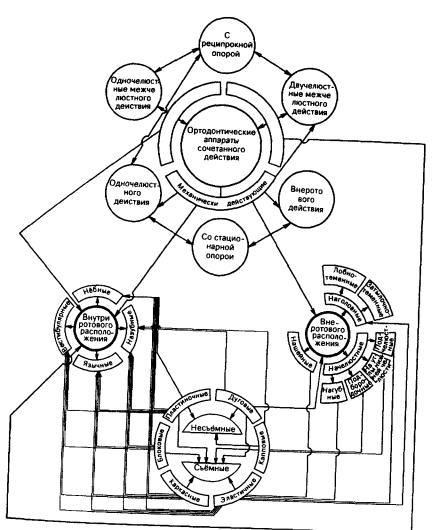
рис 10 1 Классификация ортодонтических аппаратов (схема)
По виду конструкции: дуговые, капповые, пластиночные, блоковые, каркасные.
Характеристика любого ортодонтического аппарата или его модификации складывается из его признаков по указанной схеме.
Приведем несколько примеров. Расширяющая пластинка — механически-действующий, одночелюстной, оральный, съемный, пластиночный аппарат. При добавлении наклонной плоскости, накусочной площадки или окклюзионных накладок становится аппаратом сочетанного действия. Аппарат Энгла — механическидействующий, одночелюстной, назубный, несъемный, дуговой аппарат с реципрокной или стационарной опорой. Если к дугам Энгла, укрепленным на верхнем и нижнем зубных рядах, присоединить пружины или резиновые кольца для межчелюстной тяги, такой двухчелюстной аппарат будет оказывать межчелюстное действие. Регулятор функций Френкеля — функционально-действующий, двухчелюстной, вестибулярный, съемный, каркасный аппарат с реципрокной опорой. Лицевая дуга — механически-действующий, внеротовой, съемный, дуговой аппарат со стационарной опорой.
Ортодонтический аппарат представляет собой сочетание активнодействующих, функционально-направляющих и опор-но- фиксирующих элементов. В связи с этим конструирование различных аппаратов заключается в рациональном сочетании этих элементов в зависимости от целей лечения и имеющихся клинических и лабораторных условий. Описанная систематизация ортодонтических аппаратов позволяет охарактеризовать не только известные их конструкции, но и те, которые будут разработаны в дальнейшем.
10.3.Биомеханика ортодонтического перемещения зубов
Впроцессе лечения возникает необходимость перемещать зубы в трех взаимно перпендикулярных направлениях. В связи с анатомическими особенностями зубочелюстной системы нужное давление и тягу можно оказывать в основном на коронку зуба. Его корень, который примерно в 2 раза длиннее коронки, находится в альвеоле. Под воздействием горизонтально направленной силы, приложенной к коронке зуба, происходит его наклон, а не поступательное (корпусное) перемещение.
Основываясь на третьем законе Ньютона, при конструировании ортодонтического аппарата следует определять направление и величину его действующей силы, обозначаемой как активная сила F, а также направление и величину противодействующей силы, обозначаемой как реактивная сила R (рис. Ю.2).
262

Рис. Ю.2. Направление активной (F) и реактивной (R) сил и их влияние на поступательное или вращательное перемещение тела. Объяснение в тексте.
Известно, что любое сложное движение тела по плоскости представляет собой сумму двух простых движений: поступательного, возникающего при совпадении линий действия активной и реактивной сил, и вращательного, возникающего при несовпадении линий действия этих сил. Следует учитывать, что сила характеризуется тремя параметрами — величиной, линией действия и его направлением. Рассмотрим движение тела, вращающегося вокруг неподвижной оси или центра вращения, каким является, например, маховое колесо на неподвижном стержне. Поскольку центр вращения колеса О фиксирован, то при действии активной силы F колесо будет вращаться. Для определения направления вращения колеса из его центра опускают перпендикуляр L на продолжение линии действия активной силы F. Маховое колесо вращается по часовой стрелке -М (см. рис. Ю.2, в) или против нее +М (см. рис. 10.2, а). При совпадении линий действия активной силы F и реактивной R и их прохождений через центр махового колеса оно вращаться не будет (см. рис. 10.2, б). Вращение колеса произойдет, если активная сила F, линия действия которой не проходит через центр вращения колеса О, вызовет появление пары сил. Эта пара состоит из активной силы F и реактивной R, возникающих в центре вращения колеса О; последняя всегда параллельна силе F, равна ей по величине и направлена в противоположную сторону. Суммарная величина вращающего момента (М), возникающего при данной паре сил, может быть вычислена по формуле:
"РИ равнозначной ей формуле M=F-L, так как F = R. Из
следней формулы видно, что величина вращающего момента ^ прямо пропорциональна величине активной силы F и длине
рпендикуляра L. Следовательно, чем дальше проходит линия
263

Рис. 10.3. Механизм воздействия активной силы (Р) на жесткое клиновидное тело с нефиксированным центром вращения, частично погруженное в густую, вязкую среду. Объяснение в тексте.
действия силы от центра вращения колеса, т. е. чем больше L, тем больше вращающий момент для той же величины силы F.
А. М. Schwarz (1929) сравнил движение зуба в альвеоле с движением твердого тела в вязкой среде. Опираясь на законы механики и поведение твердого тела в упругой среде (закон Гусса), он математически определил центр вращения перемещаемого зуба с учетом длины его корня, а также удаленности точки приложения одной горизонтальной силы от шейки зуба. По данным А. М. Schwarz, центр вращения перемещаемого зуба расположен между верхушечной и средней третями корня; иногда он может смещаться в сторону середины корня, но не достигает ее. .
На местоположение центра вращения перемещаемого однокорневого зуба влияет форма его корня [КамышеваЛ. И., 1969;
Schwarz А. М., 1928, 1929; MarkorzA., 1962].
Рассмотрим механизм воздействия активной силы на жесткое клиновидное тело, частично погруженное в густую вязкую среду, с нефиксированным центром вращения. Примером может служить кол, вбитый в землю. На рис. 10.3 представлены возможные варианты воздействия активной силы F на такой кол:
а) только вправо, вращение по часовой стрелке; б) вправо и вниз, вращение по часовой стрелке;
264
в) вправо и вниз, без вращения;
г) влево и вниз, вращение против часовой стрелки; д) вправо и вверх, вращение по часовой стрелке. Результат
перемещения кола зависит от направления действующей силы,
точки ее приложения, положения центра вращения кола в почве и противодействующих сил среды, в которой находится кол. В случаях,
иллюстрируемых рисунком, действующая сила направлена вправо, но под разными углами. В связи с этим появляется компонент силы,
направленный вниз, который стремится погрузить кол в землю (см.
рис. 10.3, б. в) или направленный вверх и стремящийся вытянуть кол из земли (см. рис. 10.3, д). Компонент, направленный по вертикали, отсутствует (см. рис. 10.3, а). Согласно принципу вращения махового колеса, кол будет вращаться по часовой стрелке (см. рис. 10.3, а, б, д), против нее (см. рис. 10.3, г) или вращения не будет (см.
рис. 10.3, в). Если можно было бы приложить силу в горизонтальном направлении через центр вращения, то кол переместился бы поступательно (см. рис. 10.3, е).
Корень зуба, расположенный в альвеоле, можно сравнить с колом, вбитым в землю. Подобно такому колу, под действием приложенной силы зуб может совершать поступательное и вращательное движения.
На рис. 10.4 схематично представлено действие в дистальном направлении активной силы F на первый постоянный моляр. Центр вращения зуба обычно находится на границе между средней и апикальной третью корня. В зависимости от его расположения и направления активной силы F возможны следующие варианты перемещения моляра:
а) сила F направлена перпендикулярно вертикальной оси зуба, линия ее действия проходит ниже центра его вращения; результат
—дистальное перемещение зуба с его дистальным наклоном;
6)сила F направлена дистально и вверх, линия ее действия
проходит ниже центра вращения зуба, результат — дистальное перемещение зуба с дистальным наклоном его коронки и зубоальвеолярным укорочением;
в) сила F направлена дистально и вверх, линия ее действия проходит через центр вращения зуба, результат — дистальное перемещение зуба с зубоальвеолярным укорочением, но без наклона;
г) сила F направлена дистально и вверх, линия ее действия
проходит выше центра вращения зуба, результат — ди-стальный
наклон корней зуба с мезиальным наклоном его коронки и
зубоальвеолярным укорочением;
Д) сила F направлена дистально и вниз, линия ее действия проходит ниже центра вращения зуба, результат — ди-
265

Рис. 10.4. Виды воздействия активной силы F на верхний первый постоянный моляр.
О— центр вращения зуба; F — активная (действующая) сила; R — реактивная (противодействующая) сила; L — длина перпендикуляра, опущенного из центра вращения зуба на линию дейстия силы F; M — момент вращения (прямыми стрелками обозначено направление силы, вызывающей поступательное перемещение зуба, дугообразными — вращательное). Направлению воздействия по часовой стрелке соответствует дистальный наклон зуба, против часовой стрелки
— мезиальный.
стальное перемещение зуба с дистальным наклоном его коронки и зубоальвеолярным удлинением;
е) сила F направлена дистально и перпендикулярно вертикальной оси зуба, линия ее действия проходит на уровне центра вращения; результат
— поступательное перемещение зуба. Анализируя представленные на схеме варианты силового
воздействия на зуб, можно констатировать, что в зависимости от направления линии действия активной силы F и ее отношения к центру вращения зуба он может перемещаться в дистальном направлении с дистальным или мезиальным наклоном коронки, поступательно; одновременно может происходить зубоальвеолярное удлинение или укорочение. Для достижения поступательного (корпусного) перемещения зуба c помощью одной силы необходимо исключить вращательный момент путем максимального смещения центра вращения зуба
266
за его пределы. При показаниях к перемещению корня зуба без значительного смещения его коронки силу нужно приложить в области середины корня. Для предупреждения наклона перемещаемого зуба сочетают прямолинейное воздействие на него с воздействием обратной пары сил, т. е. с вращательным воздействием. Поступательного перемещения зуба достигают при оптимальном соотношении между названными силовыми воздействиями.
10.4.Физиологические изменения в зубочелюстной системе при воздействии ортодонтических аппаратов
Стоматологические вмешательства связаны со значительными психоэмоциональными и рефлекторными реакциями центральной нервной системы (страх перед неизвестностью, ожидание боли и т. д), возникающими при непосредственном раздражении рецепторов слизистой оболочки полости рта.
Механизм привыкания к ортодонтическим аппаратам и зубным протезам. По вопросу о механизме привыкания к аппаратам высказаны противоположные точки зрения. По мнению В. Ю. Курляндского (1939), привыкание к протезам зависит от механизма коркового торможения. И. С. Рубинов (1958) пришел к выводу, что в основе привыкания к протезам лежит выработка новых условных двигательных рефлексов, которые постепенно закрепляются, а старые угасают.
Ортодонтическое лечение следует рассматривать как воздействие на весь организм, поскольку аппараты являются раздражителями длительного действия. Происходит раздражение рефлексогенного поля не только тактильных, но и болевых рецепторов, баро-, проприорецепторов, изменяются взаимоотношения зубов, челюстей, перестраивается функция жевания. В ряде случаев дети прекращают Ортодонтическое лечение, не завершив его, что можно объяснить типологическими особенностями их центральной нервной системы.
Чтобы проследить некоторые физиологические реакции, происходящие в организме ребенка при лечении, целесообразно использовать классическую физиологическую методику Н. И. Красногорского (1958). Она позволяет изучить изменение УСЛОВНЫХ и безусловных секреторных и двигательных пищевых Рефлексов как в количественном, так и в качественном отношении при непосредственном раздражении рецепторов полости рта.
Характер жевания. У больных, пользующихся ортодонтическими аппаратами, характер жевания изменяется. Ис-
267