

3.2. Кінематичне дослідження механізмів за допомогою планів швидкостей та прискорень
Метод планів має ряд переваг: простота, наочність, можливість визначення лінійних швидкостей та прискорень точок, кутових швидкостей і прискорень ланок механізму в даному його положенні.
Побудова планів швидкостей і прискорень починається з ведучої ланки, закон руху якої задано. Потім послідовно розглядають групи Ассура в порядку їх з'єднання з початковим механізмом.
Будуємо план швидкостей для положення механізму φ2=90° (рис. 1.5).
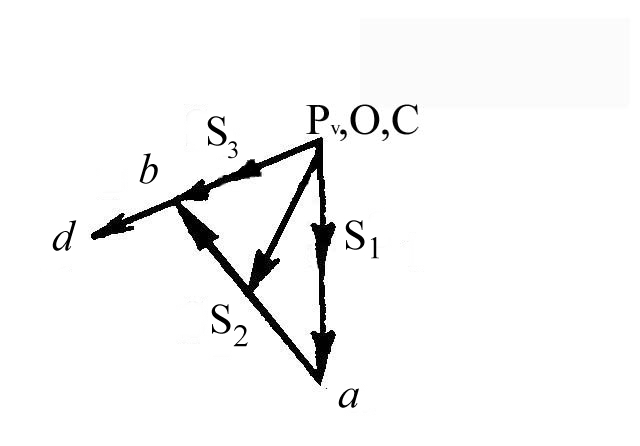
Рис. 1.5
Кутова швидкість ведучої ланки ОА
ω1=20 с-1=20 рад/с
Величина швидкості точки А ведучої ланки механізму:
Vа= ω1·lOA=20·0,3=6 м/с
Вектор швидкості точки А спрямований перпендикулярно ланці ОА в напрямку її обертання.
Із точки
pv
–
полюса плану швидкостей – проводимо
вектор
![]() мм, що зображає швидкість точкиА
в масштабі:
мм, що зображає швидкість точкиА
в масштабі:
![]() .
.
Вектор
![]() проводимо перпендикулярно ланціОА
в напрямку обертання.
проводимо перпендикулярно ланціОА
в напрямку обертання.
Для групи 2-3 складаємо систему векторних рівнянь.
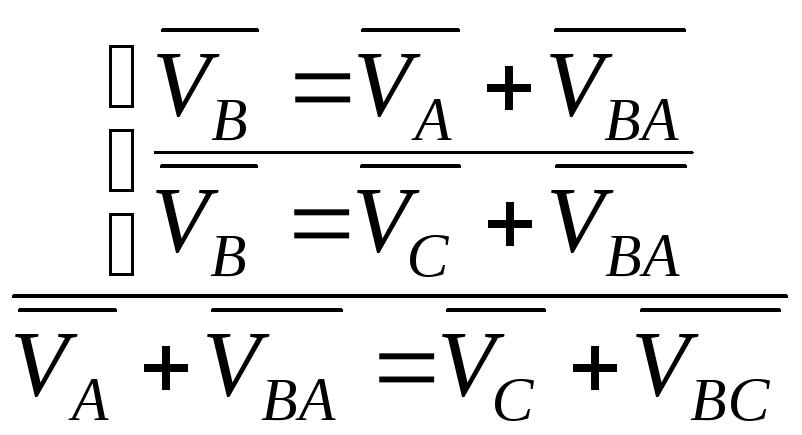 .
.
Швидкість
точки А
відома за значенням і напрямом. Відносна
швидкість
![]() відома
за напрямом – вона перпендикулярна
ланці АВ,
але невідома за величиною. Швидкість
точки С=0,
відома
за напрямом – вона перпендикулярна
ланці АВ,
але невідома за величиною. Швидкість
точки С=0,![]()
![]() ,
тобто
вона знаходиться у полюсі pv.
Відносна швидкість
,
тобто
вона знаходиться у полюсі pv.
Відносна швидкість
![]() перпендикулярна ланці ВС,
але невідома за величиною.
перпендикулярна ланці ВС,
але невідома за величиною.
З
кінця вектора
![]() на плані швидкостей проводимо лінію,
перпендикулярну ланціАВ,
а з полюса рv
–
лінію, перпендикулярну ланці ВС.
Точку перетину цих ліній позначимо b.
Вектор
на плані швидкостей проводимо лінію,
перпендикулярну ланціАВ,
а з полюса рv
–
лінію, перпендикулярну ланці ВС.
Точку перетину цих ліній позначимо b.
Вектор
![]() зображає на плані швидкостей абсолютну
швидкість точкиВ;
ії модуль дорівнює:
зображає на плані швидкостей абсолютну
швидкість точкиВ;
ії модуль дорівнює:
VВ=рvbμv=200,2=4 [м/с].
Відносна
швидкість
![]() зображена
на плані швидкостей відрізком
зображена
на плані швидкостей відрізком
![]() і ії модуль дорівнює:
і ії модуль дорівнює:
Vва=bа μv=29 0,2=5,8 [м/с].
Для знаходження швидкості точки Д скористаємося теоремою подібності фігур, які утворюють вектори відносних швидкостей і фігури на плані механізму.
Фігура відносних швидкостей на плані швидкостей подібна фігурі на плані механізму, але повернена відносно останньої на 90° у напрямі кутової швидкості фігури механізму.
![]() [мм].
[мм].
Відклавши
на продовженні відрізка
![]() (
(![]() )
відрізокbd=7мм,
одержимо точку d.
Модуль абсолютної швидкості точки Д
визначаємо за формулою:
)
відрізокbd=7мм,
одержимо точку d.
Модуль абсолютної швидкості точки Д
визначаємо за формулою:
VДВ= рvdv=70,2=1,4 [м/с].
Швидкості центрів ваги знаходимо теж за теоремою подібності:
![]() [м/с];
[м/с];
![]() [м/с];
[м/с];
![]() [м/с].
[м/с].
Кутова швидкість ланки ОА відома 1 =20 с-1, має напрям проти руху годинникової стрілки. Кутова швидкість ланки АВ визначаємо за формулою:
![]() с-1.
с-1.
Для
знаходження напряму руху кутової
швидкості ω2
перенесемо уявно відрізок (![]() ),
що зображує
),
що зображує
![]() у
точку В
механізму. Він показує в якому напрямку
обертається точка В і всі інші точки
ланки АВ навколо точки А. Швидкість ω2
має напрям проти руху годинникової
стрілки.
у
точку В
механізму. Він показує в якому напрямку
обертається точка В і всі інші точки
ланки АВ навколо точки А. Швидкість ω2
має напрям проти руху годинникової
стрілки.
Кутова швидкість ланки СД:
![]() с-1
с-1
і має
напрям по годинниковій стрілці. Для
визначення ω3
перенесемо уявно відрізок (![]() ),
що зображає
),
що зображає![]() ,
у точку В механізму. Він показує, у якому
напрямку обертається точка В і всі інші
точки ланки ВС навколо точки С.
,
у точку В механізму. Він показує, у якому
напрямку обертається точка В і всі інші
точки ланки ВС навколо точки С.
Побудова плану прискорень здійснюється в тій же послідовності, що і план швидкостей:
аА = аО+ аАО; аО=0, то аА =аАО
![]() .
.
Оскільки ланка АО рухається рівномірно (VA = const), то аAO=0. Тоді:
![]() [м/с2].
[м/с2].
Вектор
![]() має
напрям уздовж ланкиОА
від точки А
до точки О,
тобто до центру обертання (рис. 1.6).
має
напрям уздовж ланкиОА
від точки А
до точки О,
тобто до центру обертання (рис. 1.6).

Рис. 1.6
З
точки ра
– полюса плану прискорень – проводимо
відрізок довільної довжини (![]() мм), що зображає вектор прискоренняаА
в масштабі:
мм), що зображає вектор прискоренняаА
в масштабі:
![]() .
.
Відрізок
![]() проводимо паралельноОА
у напрямі від точки А
до точки О.
проводимо паралельноОА
у напрямі від точки А
до точки О.
Для групи 2-3 складаємо векторну систему рівнянь:
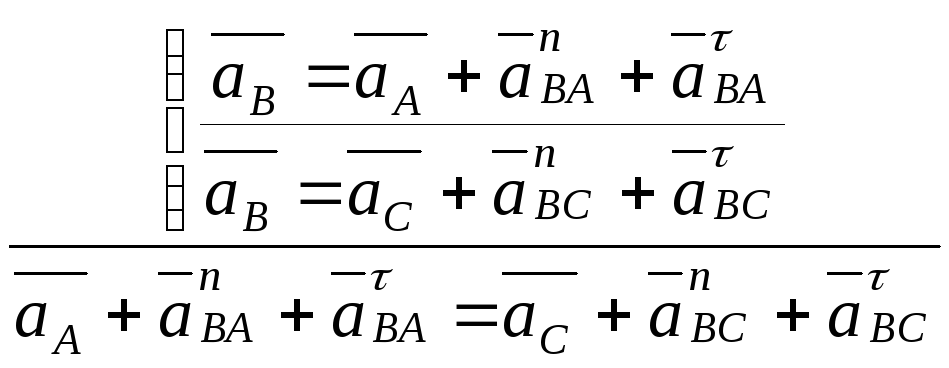 .
.
Прискорення точки А відоме за модулем, значенням і напрямом. Прискорення точки С дорівнює 0, тобто точка С знаходиться у полюсі. Прискорення аnва паралельне АB і спрямоване від точки В до точки А. Значення цього прискорення
![]() [м/с2].
[м/с2].
Прискорення аВA перпендикулярне АB. Модуль цього прискорення поки що невідомий.
Прискорення аnBC паралельне ВС і спрямоване від точки В до точки С.
Модуль прискорення:
![]() [м/с2].
[м/с2].
Прискорення
аВC
перпендикулярно
ВС,
модуль цього прискорення поки що
невідомий. З кінця вектора
![]() проводимо пряму, паралельнуАB,
у напрямі від точки В
до точки А.
На ній відкладаємо вектор
проводимо пряму, паралельнуАB,
у напрямі від точки В
до точки А.
На ній відкладаємо вектор
![]() ,
що зображує прискоренняаnBA.
Величина
цього вектора:
,
що зображує прискоренняаnBA.
Величина
цього вектора:
![]() [мм].
[мм].
З точки п проводимо пряму, перпендикулярну АВ, що зображує напрям аBA.
З полюса
ра,
тобто з точки С,
проводимо пряму, паралельну ВС
у напрямі від точки В
до точки С.
На ній відкладаємо вектор
![]() ,
що зображує прискоренняаnBС
.Величина
вектора:
,
що зображує прискоренняаnBС
.Величина
вектора:
![]() [мм].
[мм].
З точки m проводимо пряму, перпендикулярну ВС, яка зображує напрям аВС. Точку перетину цього перпендикуляра з перпендикуляром, проведеним з точки п, позначимо точкою b. З’єднаємо точку b з полюсом і точкою а.
Абсолютне прискорення точки В:
![]() [м/с2].
[м/с2].
Відносне прискорення:
![]() [м/с2].
[м/с2].
Для знаходження прискорень точки Д та центрів ваги, скористаємося теоремою подібності фігур, утворених векторами відносних прискорень і фігур на плані механізму:
Фігура відносних прискорень на плані прискорень подібна фігурі на плані механізму, але повернена відносно неї на 180° - у напрямі кутового прискорення фігури. Кут визначається з рівності:
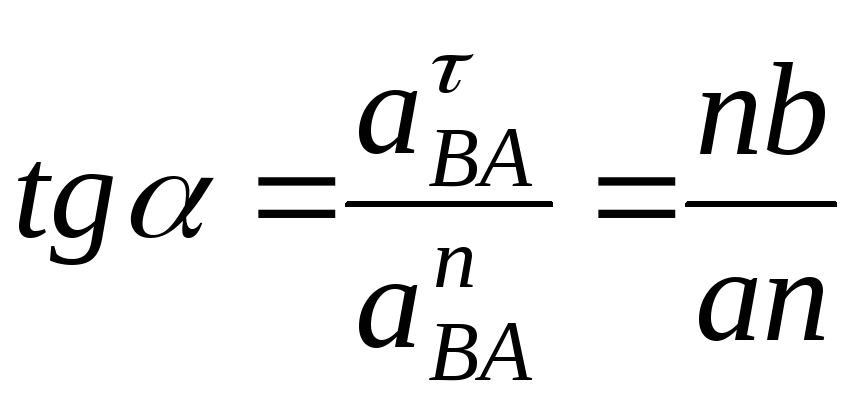 .
.
![]()
Відклавши
на продовженні вектора
![]() відрізокbd=8,8
мм, одержуємо точку d.
відрізокbd=8,8
мм, одержуємо точку d.
Модуль абсолютного прискорення точки Д:
![]() [м/с2].
[м/с2].
Модулі тангенціальних прискорень та прискорень центрів ваги:
![]() [м/с2];
[м/с2];
![]() [м/с2];
[м/с2];
![]() [м/с2];
[м/с2];
![]() [м/с2];
[м/с2];
![]() [м/с2].
[м/с2].
Кутове прискорення ланки ОА дорівнює 0. Кутове прискорення ланки АВ:
![]() [с-2].
[с-2].
Це прискорення спрямоване проти руху годинникової стрілки. Щоб визначити його напрям, переносимо уявно вектор аBA (відрізок (mb)) у точку В механізму і розглядаємо рух цієї точки відносно точки А за напрямом прискорення аBA:
![]() [с-2].
[с-2].
Прискорення ε3 має напрям проти годинникової стрілки.