

2. Структурний аналіз механізмів
Механізм – це сукупність тіл (ланок), сполучених між собою так, що заданому руху одного чи кількох з них відповідає цілком визначений рух кожного з решти.
Ланки механізму, одержуючи рух від незалежних джерел (наприклад, двигунів), прийнято вважати ведучими, а останні – веденими. Ступінь рухомості механізму повинен дорівнювати числу ведучих ланок.
Структурна формула П.Л. Чебишева для ступеня рухомості плоского механізму:
W = 3n-2р5-р4 ,
де n – число рухомих ланок кінематичного ланцюга, p5 – число кінематичних пар п'ятого класу; р4 – число кінематичних пар четвертого класу.
Методи кінематичного аналізу механізмів пов'язані з їх структурною класифікацією. Структурна класифікація Ассура–Артоболевського є одною з найбільш раціональних класифікацій плоских механізмів. Кожен плоский механізм розглядається як складна система, що складається зі стояка, ведучих та ведених ланок.
За класифікацією Ассура – Артоболевського ведуча ланка та стояк утворюють початковий механізм 1 класу (рис.1.1).
Кінематичною парою називається рухоме з’єднання двох стичних ланок. Структурна група Ассура – це кінематичний ланцюг, при приєднанні якого до механізму не змінюється ступінь рухомості механізму.

Рис.1.1
У даних завданнях будемо розглядати тільки групи Ассура II класу
II порядку (табл.1.1).
Таблиця 1.1
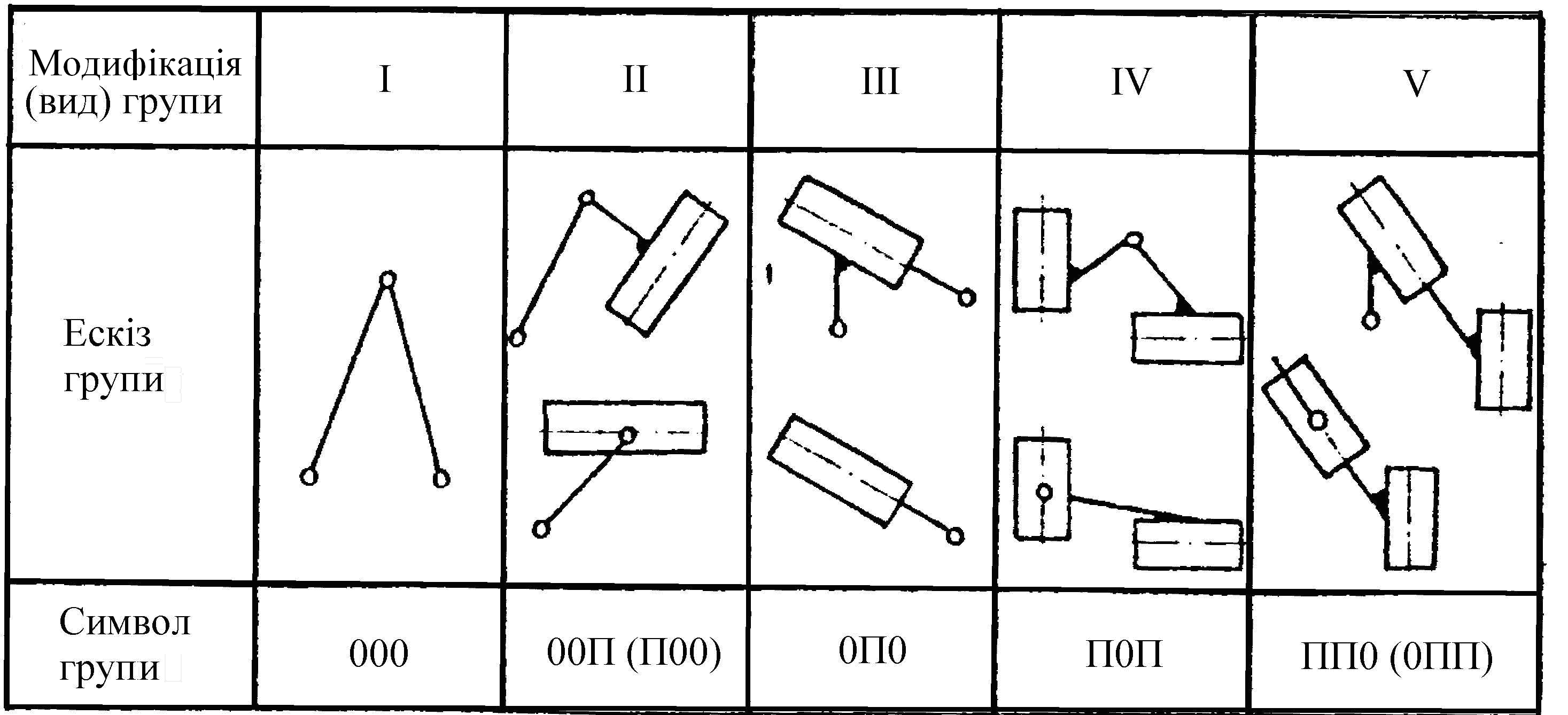
де О – обертальна пара; П – поступальна пара.
П риклад.
Визначити ступінь рухомості та виконати
структурний аналіз механізму щоковоїдробарки
(рис. 1.2).
риклад.
Визначити ступінь рухомості та виконати
структурний аналіз механізму щоковоїдробарки
(рис. 1.2).
1. Визначаємо число рухомих ланок: n=3
2. Визначаємо число кінематичних пар 5 класу р5=4
3. Визначаємо ступінь рухомості механізму:
W=3n-2 р5-р4=3-3-2-4=1
Отже, механізм має одну ведучу ланку.
Рис.1.2
Даний механізм утворений приєднанням до початкового механізму 1-4 двоповодкової групи 2-3 (рис. 1.3).

Рис. 1.3
Цей механізм є механізмом II класу.
3. Кінематичний аналіз плоских механізмів
Кінематичне дослідження плоских механізмів включає такі основні задачі:
1. Визначення положень ланок, траєкторій точок механізму.
2. Визначення величини та напряму лінійних швидкостей та прискорень точок, кутових швидкостей та прискорень ланок механізму.
3.1. Побудова плану положень ланок
Побудова плану положень механізму виконується графічно методом засічок.
Нехай треба визначити положення ланок та траєкторії точок механізму, кінематична схема якого зображена на рис. 1.2. Розміри ланок та закон руху ведучої ланки ОА задано.
lOA=0,3 м; lAB=0,8; lBC=0,65м; lBD=0,23м; lOE=y=1,1 м
lEC=х=0,09 м; 1=0°; 2=90; 1=20 c-1
Центри ваги ланок знаходяться на серединах ланок.
Так як ланка ОА обертається з постійною кутовою швидкістю навколо точки О, то траєкторією точки А є коло радіусом ОА (рис. 1.4).
Із точки О проводимо коло радіусом 30 мм, тоді масштабний коефіцієнт довжини:
l = lОА/ОА=0,3 м /30 мм =0,01 м/мм
Поділимо коло на 12 однакових частин. Позначимо положення кривошипа ОА в напрямі обертання його А1, А2, А3 і т.д.
По заданим розмірам ланок у масштабі l знаходимо положення нерухомих точок механізму О і С. З точки С проводимо дугу радіусом СВ.
СВ= lCВ/ μl= 0,65 м/0,01 м/мм=65 мм.
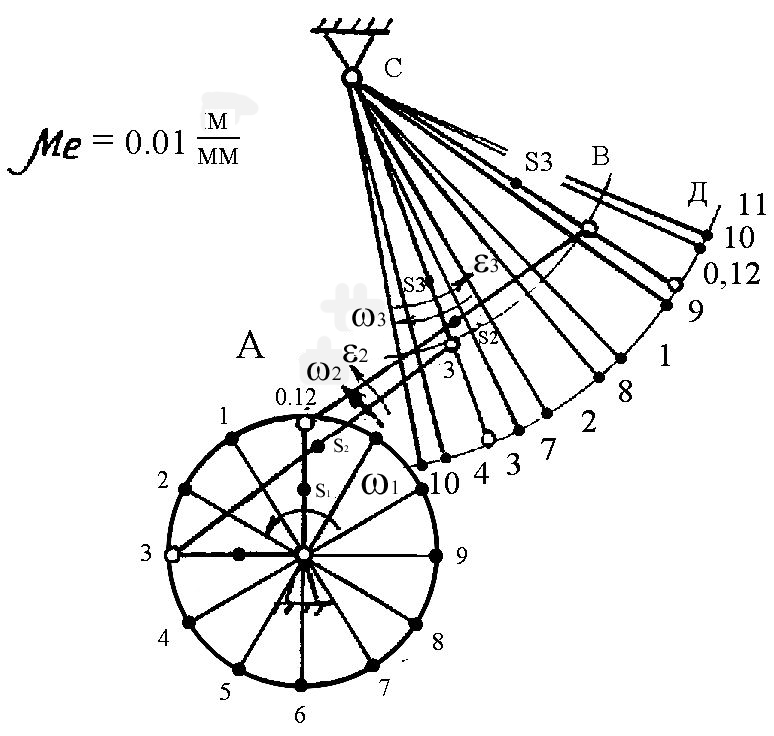
Рис.1.4.
Послідовно, із кожної точки А (А1, А2, A3 і т.д.) дугою АВ робимо на цій дузі засічки. Так знаходимо 12 положень точки В.
АВ=lав/μl =0,8 м/0,01 м/мм =80 мм.
Послідовно з'єднуємо точки А і В, В і С. Одержуємо 12 положень механізму. З точки С проводимо дугу СД і одержуємо траєкторію руху точки Д.
СД = (lCB+lBD)/μl= (0,65 м+0,23 м)/0,01 м/мм = 88 мм.
Центри ваги ланок знаходяться на серединах ланок.