

5. Типові динамічні ланки безперервних сау та їх характеристики
Чим докладніше математична модель САК, тим вище порядок n її диференціального рівняння. Передавальні функції систем високого порядку (зазвичай n > 4) виявляються громіздкими і незручними для аналізу. Щоб вийти з цього положення, передавальну функцію представляють у вигляді перемноження простих співмножників, порядок яких не перевищує два. Такі співмножники називають типовими ланками.
5.1. Безінерційна ланка
Безінерційна (статична) ланка є найпростішою серед всіх типових ланок. Вона передає сигнал з входу на вихід миттєво, без спотворення його форми. У ланці може відбуватися тільки посилення або послаблення вхідного сигналу.
Зв'язок між миттєвими значеннями вхідної величини x(t) і вихідної величини у(t) описується рівнянням алгебри:
y(t) = kx(t).
Передавальні властивості ланки визначаються лише одним параметром - коефіцієнтом передачі k.
Перехідна функція Імпульсна перехідна функція
h(t) = k1(t) w(t) = k(t)
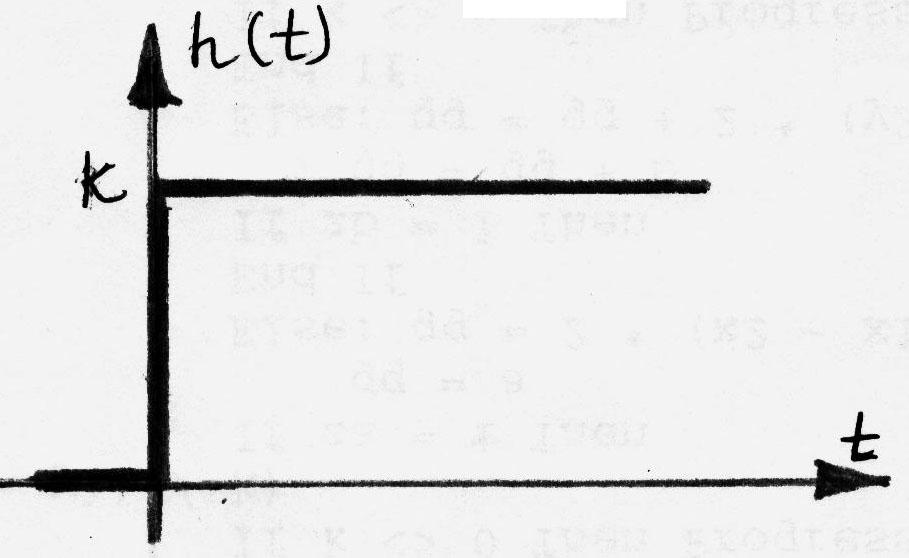
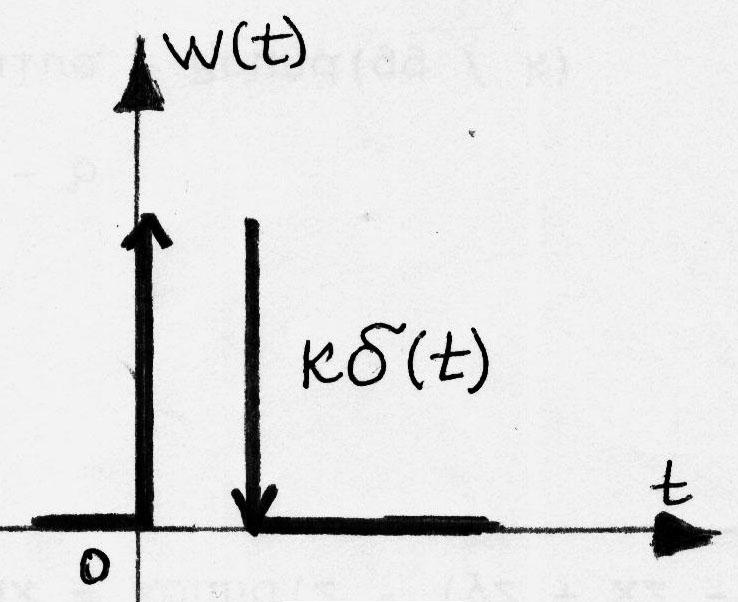
Рівняння ланки в операційній формі Y(p) = kX(p)
Передаточна
функція
![]()
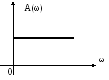
A ()
= |W(j)|
= k
()
= |W(j)|
= k  ()
= arctg(0/R)
= 0 W(j)
= k
()
= arctg(0/R)
= 0 W(j)
= k


L() = 20 lg A() = 20 lg k
АЧХ і ФЧХ безінерційної ланки показують, що сигнали будь-якої частоти (0; +) проходять через ланку з однаковим відношенням амплітуд вихідної і вхідної величини, рівним k і не мають між собою фазового зсуву.
Прикладами безінерційних ланок є редуктор, датчик потенціометра кутового переміщення, тахогенератор, який використовують як датчик частоти обертання і т. д. Пропорційними ланками моделюються підсилювачі, редуктори, дільники напруги і т. п.
Слід зазначити, що поняття безінерційної ланки є продуктом математичної ідеалізації. Насправді всі реальні конструктивні елементи САК володіють деякою інерційністю, оскільки передача енергії з входу на вихід елементу не може здійснюватися миттєво. Проте, якщо інерційність того або іншого елементу на два-три порядки менша, ніж у решти елементів даної системи, то його вважають безінерційною ланкою.
5.2. Інерційна ланка першого порядку (аперіодична ланка)
Фізично аперіодична ланка містить один елемент, що накопичує енергію, а також один або декілька елементів здатних її розсіювати.
Диференціальне рівняння:
![]()
k – коефіцієнт передачі, характеризує властивості ланки в статичному режимі.
Т – постійна часу, характеризує інерційність ланки


![]()
![]()
Коефіцієнт посилення ланки визначає рівень, до якого прагне перехідна характеристика з часом. Дотична, проведена на початку координат до перехідної характеристики, перетинає цей рівень у момент часу, рівний постійної часу аперіодичної ланки Т. Ці властивості аперіодичної ланки, а також те, що перехідний процес закінчується приблизно за час, що дорівнює 3Т, дозволяє визначати параметри ланки (коефіцієнт посилення і постійну часу) по його експериментальній перехідній характеристиці.
Рівняння ланки в операторній формі (Tp+1)Y(p) = kX(p)
Передаточна
функція
![]()
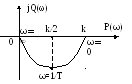
АФЧХ:
![]() АЧХ:
АЧХ:![]()
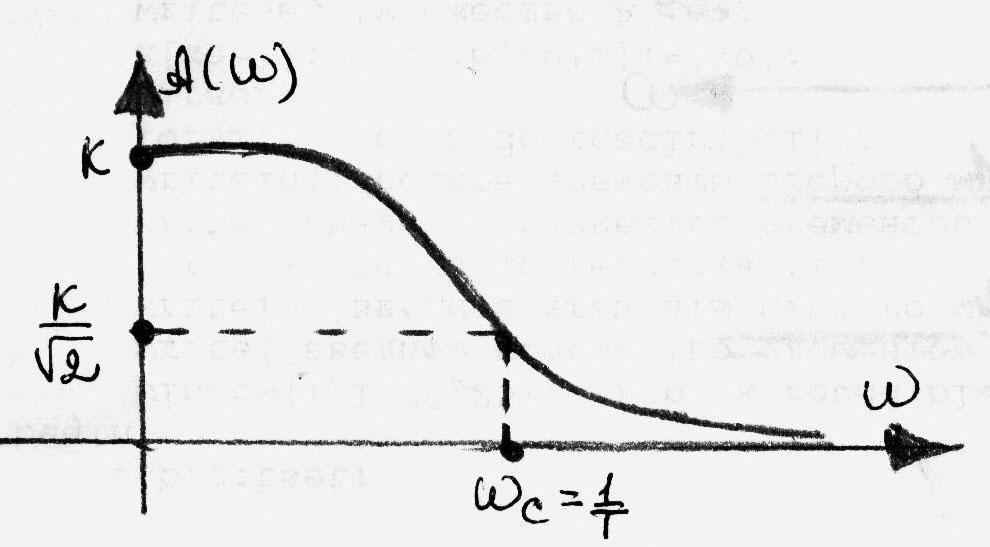
Аналізуючи
графік функції
![]() ,
видно, що гармонійні сигнали малої
частоти (
,
видно, що гармонійні сигнали малої
частоти (![]() )
пропускаються ланкою добре - з відношенням
амплітуд вихідної і вхідної величин,
близьким до передавального коефіцієнта
k.
Сигнали великої частоти (
)
пропускаються ланкою добре - з відношенням
амплітуд вихідної і вхідної величин,
близьким до передавального коефіцієнта
k.
Сигнали великої частоти (![]() )
погано пропускаються ланкою: відношення
амплітуд істотно менше коефіцієнта k.
Чим більше постійна часу Т,
тобто чим більше інерційність ланки,
тим менше АЧХ витягнута уздовж осі
частот, або, як прийнято говорити в ТАУ,
тим вужче смуга пропускання частот.
Таким чином, інерційна ланка першого
порядку по своїх частотних властивостях
є фільтром
низької частоти.
)
погано пропускаються ланкою: відношення
амплітуд істотно менше коефіцієнта k.
Чим більше постійна часу Т,
тобто чим більше інерційність ланки,
тим менше АЧХ витягнута уздовж осі
частот, або, як прийнято говорити в ТАУ,
тим вужче смуга пропускання частот.
Таким чином, інерційна ланка першого
порядку по своїх частотних властивостях
є фільтром
низької частоти.
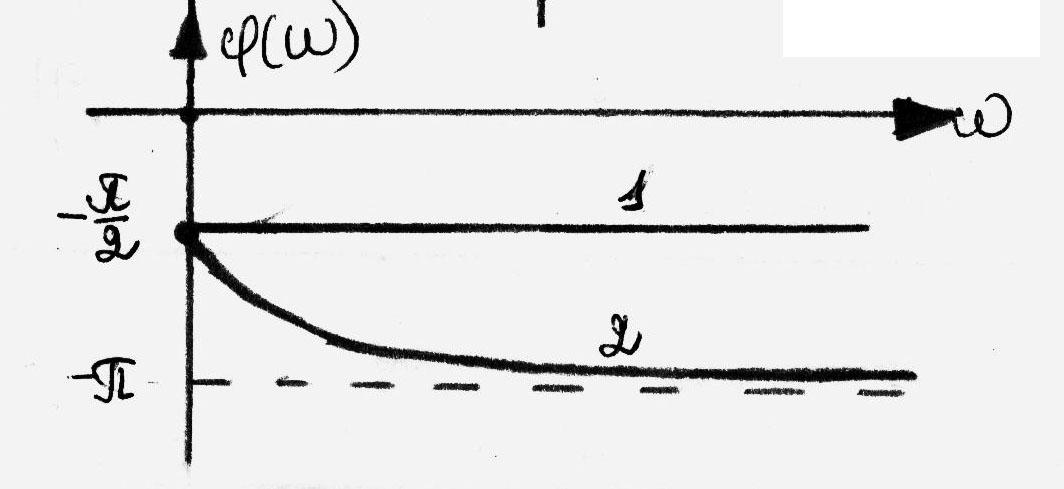
ФЧХ:
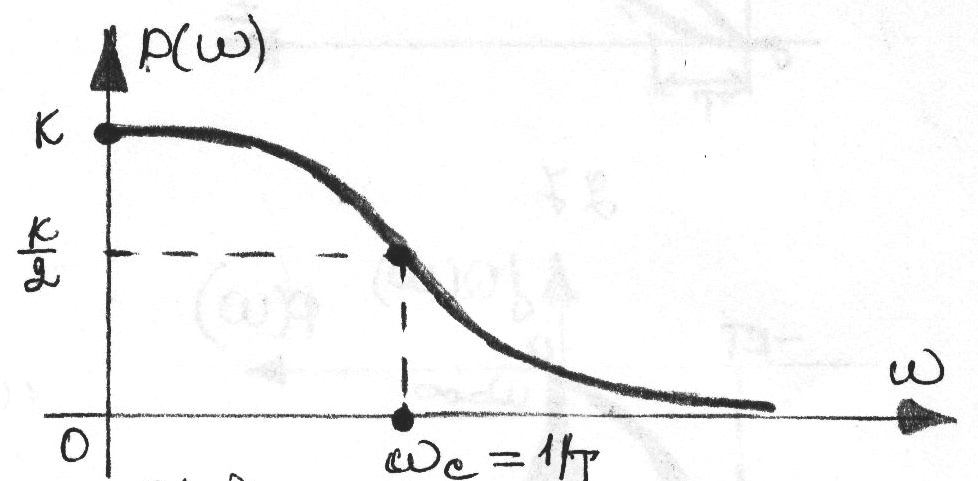
ВЧХ:
![]()
![]()

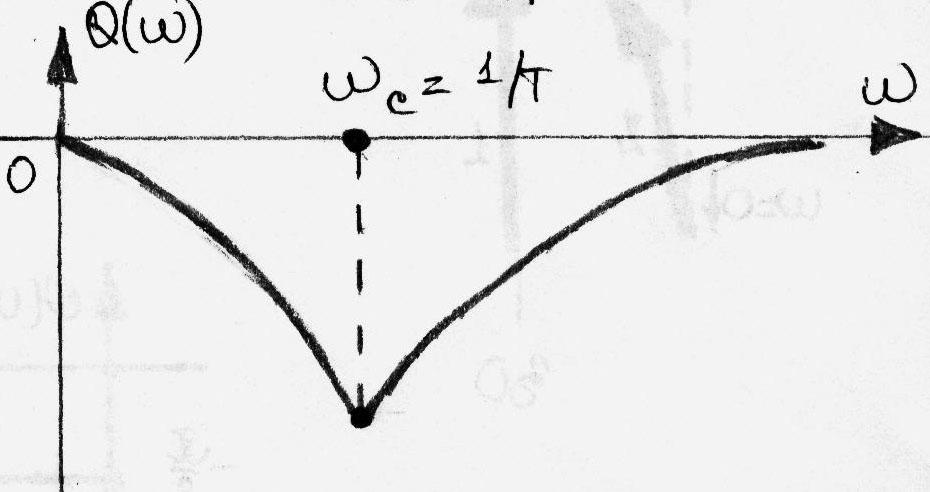
МЧХ:
ЛАЧХ:
![]()
![]()
У
практичних розрахунках використовують
наближену або асимптотичну характеристику
![]() ,
яка
є ламана у вигляді двох асимптот.
,
яка
є ламана у вигляді двох асимптот.
Першу
асимптоту (низькочастотна) маємо при
низьких частотах, коли величиною ![]() у виразі
у виразі
![]() можна нехтувати і прийняти, що
можна нехтувати і прийняти, що
![]() .
Низькочастотна асимптота від частоти
не залежить і є прямою, паралельною осі
частот і віддалену від неї на відстані
.
Низькочастотна асимптота від частоти
не залежить і є прямою, паралельною осі
частот і віддалену від неї на відстані
![]() .
.
Друга
асимптота (високочастотна) замінює
точну характеристику при великих
частотах, коли ![]() ,
і одиницю під коренем у виразі
,
і одиницю під коренем у виразі
![]() можна не враховувати. Вираз для цієї
асимптоти має вигляд:
можна не враховувати. Вираз для цієї
асимптоти має вигляд:
![]() .
.
Ця
асимптота залежить від частоти. У
логарифмічній системі координат вона
є прямою, що має негативний нахил і що
проходить через точку з координатами
![]() ,
,
![]() .
Приріст високочастотної асимптоти, що
приходить на одну декаду, рівний -20 дб.
.
Приріст високочастотної асимптоти, що
приходить на одну декаду, рівний -20 дб.
Значення
сполучної
частоти
![]() при
якій перетинаються обидві асимптоти,
знайдемо з умови
при
якій перетинаються обидві асимптоти,
знайдемо з умови
![]() ,
звідки
,
звідки ![]() .
.
І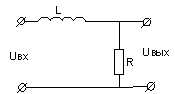 нерційними
ланками першого порядку є конструктивні
елементи, які можуть накопичувати і
передавати енергію або речовину. У
електричних елементах накопичувачем
енергії електричного поля служить
конденсатор, а магнітного поля -
індуктивність. У механічних елементах
потенційна енергія накопичується в
пружинах і інших пружних елементах, а
кінетична - в рухомих масах.
нерційними
ланками першого порядку є конструктивні
елементи, які можуть накопичувати і
передавати енергію або речовину. У
електричних елементах накопичувачем
енергії електричного поля служить
конденсатор, а магнітного поля -
індуктивність. У механічних елементах
потенційна енергія накопичується в
пружинах і інших пружних елементах, а
кінетична - в рухомих масах.

k = 1 T = RC k = 1 T = L/R