

Передавальні функції і рівняння динаміки типової одноконтурної системи
Для спрощення і уніфікації аналізу, складні схеми САР приводять до типового вигляду. Всі елементи контура початкової САР, окрім суматора і об'єкту управління згортають в одну ланку, яку умовно називають регулятором. Зворотний зв'язок - одиничний негативний. Збурення діє на вхід об'єкту керування. Схема набуває вигляду:

Об'єкт управління характеризується однією керованою змінною Y(p), яку потрібно стабілізувати на заданому рівні X(p) На стабілізуючу змінну Y(p) впливає збурення F(p). Відхилення вихідної змінної Y(p), яке викликається цим збуренням компенсується в системі цілеспрямованими змінами керуючого впливу U(p), який створюється регулятором (керуючим пристроєм). На вході регулятора з передавальною функцією Wу (p) діє сигнал розузгодження (помилки) (p). Цей сигнал формується в результаті порівняння (алгебраїчного підсумовування) задаючого впливу X(p) і керованої величини Y(p).
Складемо передавальні функції і рівняння динаміки типової одноконтурною САК.
1. Передавальна функція розімкненої системи - виходить розмиканням зворотного зв'язку і f(p)=0.
![]()
2. Передавальна функція замкнутої САК по задаючому впливу - приймаємо f(p) = 0:
![]()
3. Передавальна функція САК по збурюючому впливу - приймаємо X(p) = 0:
![]()
Згідно принципу суперпозиції (накладення) загальна зміна вихідної величини Y(p), що виникає при сумісній дії вхідних впливів X(p) і F(p), дорівнює сумі змін, що створюються кожним впливом окремо. Звідси рівняння динаміки САУ в короткій формі:
![]()
або в розгорненому вигляді:
![]()
![]()
![]()
Для типової одноконтурної системи прийнято записувати передавальні функції щодо сигналу помилки (розузгодження).
4. Передавальна функція САК щодо сигналу помилки по задаючому впливу (при f(p)=0):
![]()
5. Передавальна функція САК щодо сигналу помилки по збурюючому впливу (при x(p)=0):
![]()
Згідно принципу суперпозиції (накладення) загальна зміна сигналу помилки Е(p), що виникає при сумісній дії вхідних впливів X(p) і F(p), дорівнює сумі змін, що створюються кожним впливом окремо. Звідси рівняння динаміки САК для сигналу помилки в короткій формі:
![]()
або в розгорненому вигляді:
![]()
![]()
![]()
7. Побудова логарифмічних частотних характеристик систем автоматичного управління.
Розглянемо побудову логарифмічних частотних характеристик на прикладах, з яких стає зрозумілим загальний метод побудови.
Приклад 1.
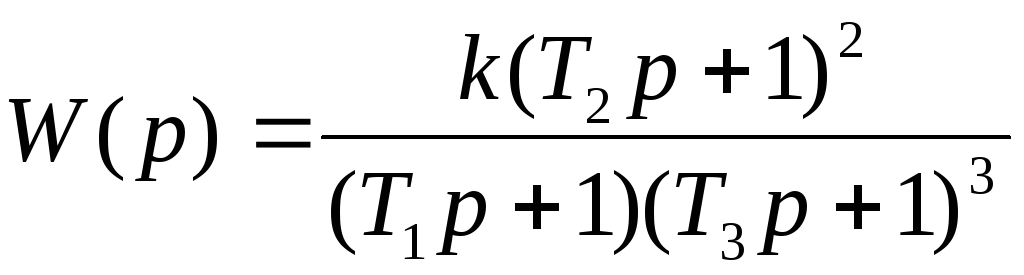
Необхідно побудувати логарифмічні частотні характеристики системи, передавальна функція розімкненого контуру якої має вигляд:
![]() ,
Т1
> Т2
>
Т3.
,
Т1
> Т2
>
Т3.
![]()
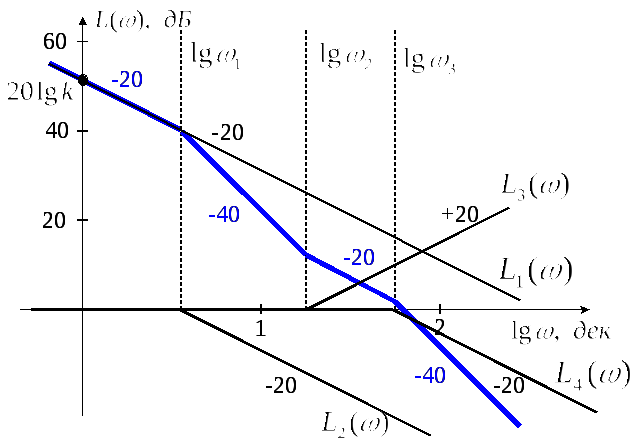
Запишемо вираз для логарифмічної частотної характеристики:
![]()
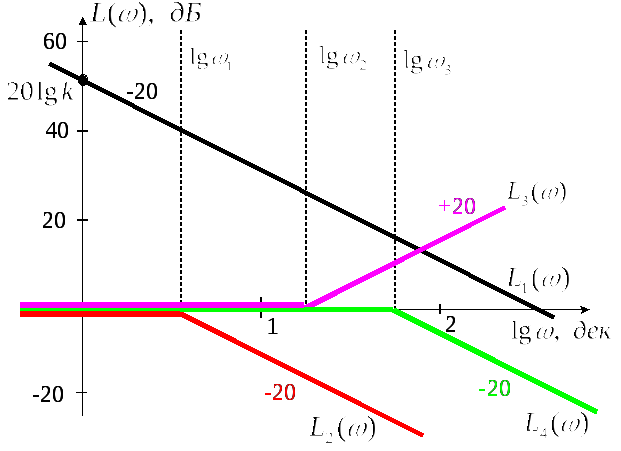
ЛАЧХ даної системи складається з ЛАЧХ типових ланок, що входять до складу системи:

Знайдемо частоти сполучення в ЛАЧХ кожної типової ланки:
![]() ;
; ![]() ;
;![]() .
.
Запишемо вираз для ЛФЧХ:
![]()


Приклад 2.
Необхідно побудувати логарифмічні частотні характеристики системи, передавальна функція розімкненого контуру якої має вигляд:
 ,
Т1
> Т2
>
Т3.
,
Т1
> Т2
>
Т3.
![]()
Запишемо вираз для логарифмічної частотної характеристики:
![]()
Знайдемо частоти сполучення в ЛАЧХ кожної типової ланки:
![]()
 ;
; ![]() ;
;![]() .
.


Запишемо вираз для ЛФЧХ:
![]()

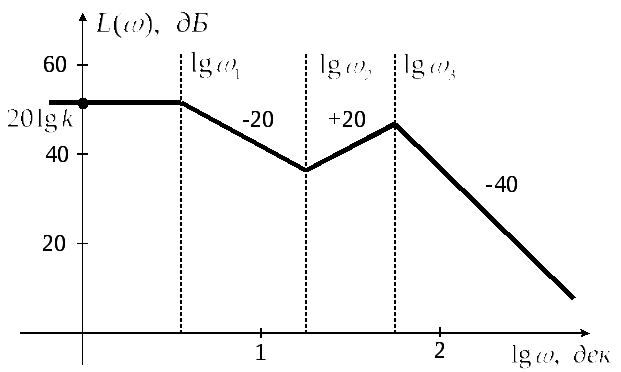
ЛАЧХ
можна будувати безпосередньо по заданій
передавальній функції. Для цього
необхідно пам'ятати, що згідно
характеристикам типових ланок, кожному
співмножнику типу (Тр+1)
в знаменнику відповідає точка злому
характеристики при
![]() з подальшою зміною нахилу на -20дБ/дек,
а кожному співмножнику такого ж типу в
чисельнику відповідає точка зламу
характеристики при
з подальшою зміною нахилу на -20дБ/дек,
а кожному співмножнику такого ж типу в
чисельнику відповідає точка зламу
характеристики при![]() з подальшою зміною нахилу на +20дБ/дек.
Співмножнику типу
з подальшою зміною нахилу на +20дБ/дек.
Співмножнику типу![]() відповідає злам із зміною нахилу на ±
40дб/дек. Вид початкової ділянки ЛАЧХ
визначається наявністю або відсутністю
ідеальних інтегруючих або диференцюючих
ланок.
відповідає злам із зміною нахилу на ±
40дб/дек. Вид початкової ділянки ЛАЧХ
визначається наявністю або відсутністю
ідеальних інтегруючих або диференцюючих
ланок.
Якщо передавальна функція розімкненої системи представлена у вигляді відношення поліномів, то застосовують наступну методику.
 ,
,
![]() ;
;![]()
Визначаємо частоти сполучення:
-
чисельника
![]() ;
;![]() ;
;![]() ;
…;
;
…;![]() .
.
- знаменника
![]() ;
;![]() ;
;![]() ;
…
;
…![]() .
.
Значення
частот сполучення відкладають по осі
частот за збільшенням. Нахил ЛАЧХ на
частотах сполучення, які належать
знаменнику змінюються на -20дБ/дек, а на
частотах сполучення, які належать
чисельнику змінюються на +20дБ/дек.
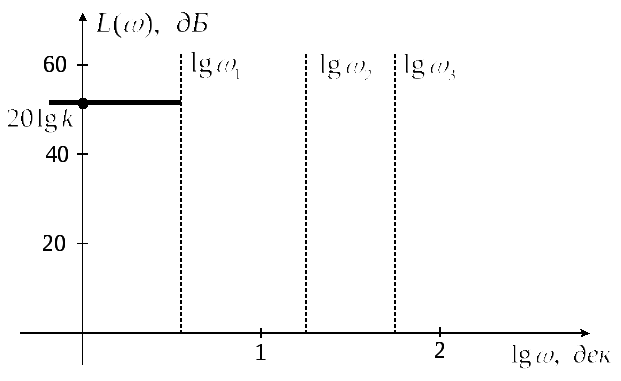
Низькочастотна асимптота проходить з
нахилом -20![]() дб/дек через крапку з координатами (
дб/дек через крапку з координатами (![]() ).
).