2. Принципи побудови систем управління
Прийнято розрізняти три фундаментальні принципи управління: принцип розімкненого керування, принцип компенсації, принцип зворотнього зв'язку.
Р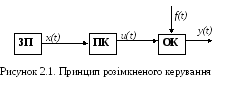 озглянуту
САК хлібопекарської печі можна відобразити
функціональною схемою (рис.2.1). У даній
схемі закладенийпринцип
розімкненого керування,
який полягає в тому, що програма управління
чітко задана ЗП; управління не враховує
вплив збурень на параметри процесу.
озглянуту
САК хлібопекарської печі можна відобразити
функціональною схемою (рис.2.1). У даній
схемі закладенийпринцип
розімкненого керування,
який полягає в тому, що програма управління
чітко задана ЗП; управління не враховує
вплив збурень на параметри процесу.
У системах такого типу відсутній контроль керованої величини і збурюючого фактору. Керована величина є функцією тільки від задаючого впливу.
Системи такого типу достатньо ефективні лише за умови, що вплив збурень на керовану величину невеликий і всі елементи розімкненого ланцюга володіють стабільними характеристиками.
Принцип компенсації збурюючого впливу
Якщо збурюючий чинник спотворює вихідну величину до неприпустимих меж, то застосовують принцип компенсації (рис.2.2, КП- коректуючий пристрій).

Переваги принципу компенсації:
- швидкість реакції на збурення - вплив збурення компенсується ще до того, як воно виявиться на виході об'єкту;
- він точніший, ніж принцип розімкненого управління;
- не виникає проблема стійкості (розімкнені системи).
Недоліки:
- неможливість обліку так само всіх можливих збурень;
- у цих системах, як і в розімкнених, з'являються відхилення вихідної величини при зміні характеристик ОК;
- такі системи можна створювати тільки тоді, коли збурюючі впливи можна виміряти.
П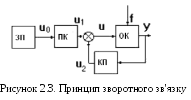 ринцип
зворотного зв'язку
ринцип
зворотного зв'язку
Найбільшого поширення в техніці набув принцип зворотного зв'язку (рис.2.3).
Керуючий вплив коректується залежно від вихідної величини у(t). І вже не важливо, які обурення діють на ОК. Якщо значення у(t) відхиляється від потрібного, то відбувається коректування сигналу u(t) з метою зменшення даного відхилення. Зв'язок виходу ОК з його входом називається головним зворотним зв'язком (ЗЗ).
Переваги принципу зворотного зв'язку:
- зменшує відхилення керованої величини незалежно від того, якими чинниками воно було обумовлене (враховують всі обурення, що діють на керовану величину);
- менш чутливий до зміни параметрів елементів системи, порівняно з розімкненими системами.
Недоліки принципу зворотного зв'язку:
- наявність зворотного зв'язку приводить до виникнення коливань в системі, що іноді робить систему непрацездатною;
- виникає проблема стійкості;
- інерційність системи – робота керуючого пристрою починається тільки після того, як збурюючий вплив викличе відхилення керованої величини.
Часто застосовують комбінацію даного принципу з принципом компенсації, що дозволяє об'єднати переваги обох принципів: швидкість реакції на збурення принципу компенсації і точність регулювання незалежно від природи збурень принципу зворотного зв'язку.
3. Режими роботи автоматичних систем
Стан системи характеризується зміною керованої величини в часі. Стан системи і режими переходу залежать як від форми, так і від власних властивостей системи.
Розрізняють два режими роботи автоматичних систем і їх елементів: статичний і динамічний.
Статичним режимом називають стан системи, при якому керована (вихідна) величина не змінюється в часі, у(t)=const. Зрозуміло, що статистичний режим може мати місце лише тоді, коли вхідні впливи постійні в часі. Зв'язок між вхідними і вихідними величинами в статичному режимі описується рівняннями алгебри.
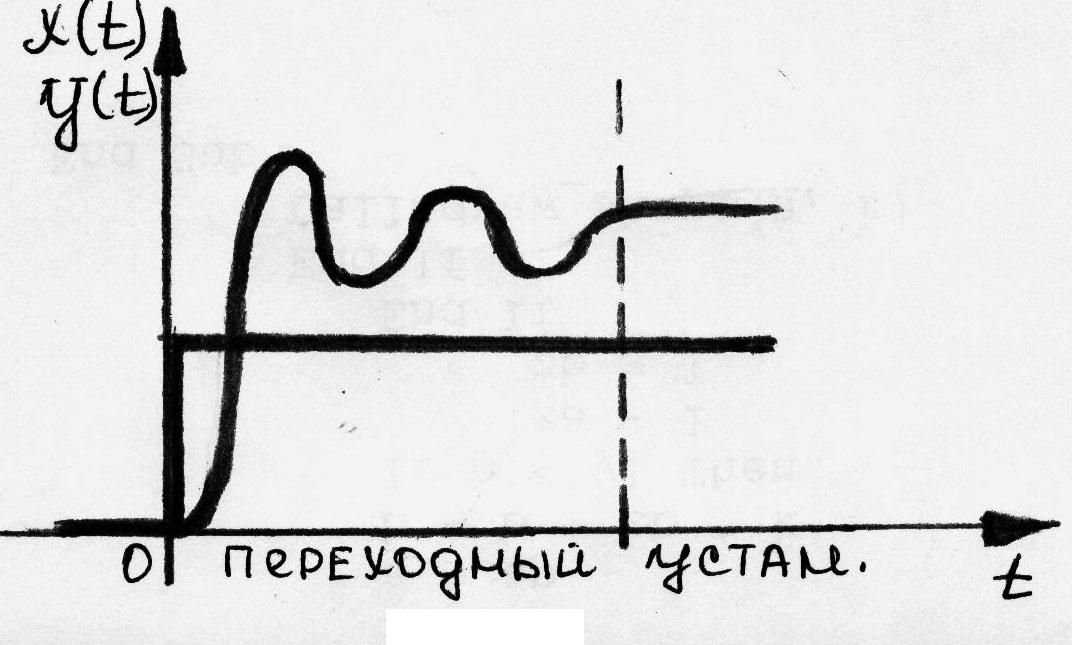
У динамічному режимі роботи системи керована (вихідна) величина безперервно змінюється в часі - у(t)= var. Динамічні режими мають місце, коли в системі після нанесення зовнішніх впливів відбуваються процеси встановлення заданого стану або заданої зміни вихідної величини. Ці процеси називаються процесами керування і описуються в загальному випадку диференціальними рівняннями. Динамічні режими розділяються на неусталені і усталені. Неусталені, або перехідні режими мають місце відразу після зміни зовнішніх дій. Вид функції у(t) в перехідному режимі залежить від типу впливу і власних динамічних властивостей системи. Усталений режим роботи наступає після закінчення перехідного процесу, коли вихідна величина системи змінюється в часі по такому ж закону, що і вхідний вплив. Статичний режим є окремим випадком усталеного режиму при x(t)=const.
Ці графіки ілюструють різницю між перехідними і усталеними режимами роботи при типових впливах.