

11.7. Емпіричне настроювання типових регуляторів
Один із традиційних шляхів проектування ПІД-регулятора - використання емпіричних правил настроювання, заснованих на вимірах, зроблених на реальному об'єкті.
Метод коливань Зіглера-Нікольса
Ця процедура застосовна тільки для стійких об'єктів і виконується за допомогою наступних кроків.
- взяти реальний об'єкт із пропорційним управлінням і дуже маленьким посиленням;
- збільшувати посилення, поки в контурі не почнуться коливання (необхідно одержати лінійні коливання на виході регулятора);
- визначити
граничне (граничне) посилення регулятора
![]() й
період коливань
й
період коливань
![]() на
виході регулятора;
на
виході регулятора;
- обчислити параметри регулятора згідно табл.1.
Таблиця 1. Настроювання типових регуляторів методом коливань Зіглера-Нікольса
|
|
|
|
|
|
П |
|
-- |
-- |
|
ПІ |
|
|
-- |
|
ПИД |
|
|
|
Є деякі розбіжності відносно різних способів ПІД-параметризації, для яких був розроблений метод Зіглера-Нікольса, але описаний тут варіант застосуємо до параметризації наступного виду:
![]() . (1)
. (1)
Настроювання в табл.1 були отримані Зіглером і Нікольсом, для об'єктів, задовільно описуваних моделлю:
 . (2)
. (2)
Зауваження.
Настроювання
типових регуляторів, розрахованих за
методом Зіглера-Нікольса дуже
чутливі
до
відношення
постійної запізнювання й постійної
часу об'єкта
![]() .
Інший недолік цього методу - те, що він
вимагає досягнення коливань об'єкта;
що може бути небезпечно й дорого. Із
цієї причини були розроблені інші
стратегії настроювання, які не вимагають
такого експлуатаційного режиму.
.
Інший недолік цього методу - те, що він
вимагає досягнення коливань об'єкта;
що може бути небезпечно й дорого. Із
цієї причини були розроблені інші
стратегії настроювання, які не вимагають
такого експлуатаційного режиму.
Методи, засновані на використанні кривій відгуку процесу
Для практичних розрахунків систем управління такими об'єктами кожну S-образну криву перехідного процесу, зняту при одиничному східчастому впливі, досить охарактеризувати наступними параметрами, обумовленими безпосередньо за графіком:
- коефіцієнт
передачі
![]() ;
;
- постійна
часу
![]() ;
;
- повне
запізнювання
![]() .
.
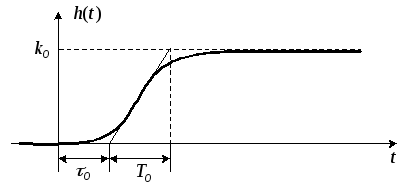
Параметри
![]() й
й![]() визначаються досить легко – проведенням
дотичної до найбільш крутої ділянки
перехідної характеристики.
визначаються досить легко – проведенням
дотичної до найбільш крутої ділянки
перехідної характеристики.
Отримані
параметри моделі (![]() ,
,![]() ,
,![]() )
можуть використовуватися різними
методами настроювання ПІД-регуляторів.
Один із цих методів був також запропонований
Зіглером і Нікольсом. За їхнім планом
ціль проектування полягає в тому, щоб
досягти певного демпфірування для
перехідної характеристики замкнутої
системи. Точніше ціль полягає в тому,
щоб одержати відношення 4:1 для першого
й другого максимумів на цій характеристиці.
Запропоновані параметри показані в
табл.2.
)
можуть використовуватися різними
методами настроювання ПІД-регуляторів.
Один із цих методів був також запропонований
Зіглером і Нікольсом. За їхнім планом
ціль проектування полягає в тому, щоб
досягти певного демпфірування для
перехідної характеристики замкнутої
системи. Точніше ціль полягає в тому,
щоб одержати відношення 4:1 для першого
й другого максимумів на цій характеристиці.
Запропоновані параметри показані в
табл.2.
Таблиця 2. Настроювання типових регуляторів методом Зіглера-Нікольса при використанні кривої відгуку
|
|
|
|
|
|
П |
|
-- |
-- |
|
ПІ |
|
|
-- |
|
ПІД |
|
|
|
Правила завдання параметрів у табл.2, при міняються до моделі ПІД-регулятора (1).
Виконані
дослідження показують надзвичайну
чутливість результату до значень
відносини
![]() .
Для зменшення цього обмеження, Коен і
Кун виконали додаткові дослідження,
щоб знайти настроювання регулятора для
тієї ж моделі (1), але такі, щоб вони давали
меншу залежність від відношення постійної
запізнювання до постійного часу
.
Для зменшення цього обмеження, Коен і
Кун виконали додаткові дослідження,
щоб знайти настроювання регулятора для
тієї ж моделі (1), але такі, щоб вони давали
меншу залежність від відношення постійної
запізнювання до постійного часу
![]() .
Їхні результати наведені в табл.3.
.
Їхні результати наведені в табл.3.
Таблиця 3. Настроювання типових регуляторів методом Коена-Куна при використанні кривої відгуку
|
|
|
|
|
|
П |
|
-- |
-- |
|
ПІ |
|
|
-- |
|
ПІД |
|
|
|
Необхідно завжди пам'ятати, що настроювання, отримані з використанням кожного з вищерозглянутих емпіричних методів - тільки відправні точки в процесі одержання потрібного регулятора.