

19.3. Логические нелинейные законы управления.
Нелинейные законы управления могут иметь иные формы, которые реализуются с помощью не функциональных, а более или менее сложных логических устройств. Например, в системе на рис. 19.4 логический нелинейный закон управления может быть применен для экономии управляющих воздействий со стороны системы управления на объект (а также экономии расхода энергии на нужды управления).

Рисунок 19.4.
Построение простейшего логического нелинейного закона управления лучше всего пояснить на плоскости двух входных величин и1, и2 (рис.19.5). Последние соответствуют отклонению х и скорости отклонения х’ регулируемой величины.

Рисунок 19.5
Управляющее
воздействие (и
= + 1 или и
= ‑ 1)
включается только тогда, когда
![]() ,
т. е. когда
отклонение достаточно велико, и
,
т. е. когда
отклонение достаточно велико, и
![]() имеет знак, одинаковый со знаком
имеет знак, одинаковый со знаком![]() или противоположный, но при малом
или противоположный, но при малом![]() .
Во всех остальных случаях управление
выключено(и = 0),
так как при противоположных знаках
.
Во всех остальных случаях управление
выключено(и = 0),
так как при противоположных знаках
![]() и
и![]() и достаточной величине
и достаточной величине![]() система сама без управления возвращается
к требуемому положениюх
= 0 (если при
этом гарантирована противоположность
знаком х
и х’)
(рис.19.4).
система сама без управления возвращается
к требуемому положениюх
= 0 (если при
этом гарантирована противоположность
знаком х
и х’)
(рис.19.4).
Логические нелинейные законы управления могут быть связаны также с изменением структуры системы управления. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производной и по интегралу (рис.19.6) в зависимости от сочетания значения отклонения регулируемой величины х и скорости отклонения ее х’. При этом можно существенно повысить качество работы системы управления.
Вместо комбинирования указанных на рис. 6 линейных членов закона управления могут вводиться также и функциональные нелинейные члены, включение и выключение которых производится при помощи логического устройства. Тогда получится комбинация функциональных и логических нелинейных законов управления.
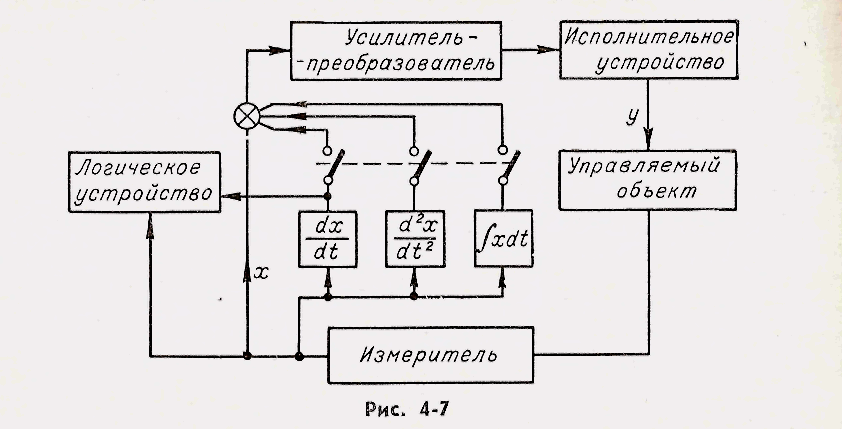
Рисунок 19.6
19.4. Оптимизирующие нелинейные законы управления.
В настоящее время интенсивно развивается теория оптимальных процессов управления. При этом на основе классических вариационных методов или на основе так называемого принципа максимума определяется закон управления таким образом, чтобы система имела максимум быстродействия или минимум ошибки или же максимум, либо минимум какой-нибудь другой величины с учетом ограничений, накладываемых в реальной системе на координаты, скорости, силы и т. п. Как правило, при этом приходят к нелинейным законам управления, хотя, вообще говоря, можно оптимизировать и коэффициенты линейного закона. Часто оптимальный нелинейный закон управления состоит в переключении управляющего воздействия при определенных состояниях системы с одного максимально возможного значения на другое, противоположного знака. Моменты переключения в целом определяются комбинациями стольких значений обобщенных координат и обобщенных скоростей, каков суммарный порядок дифференциальных уравнений системы.
В связи с этим необходимо отметить, что, во-первых, само определение моментов переключения для систем общего вида выше второго порядка весьма затруднительно (а во многих случаях до конца неразрешимо), во-вторых, система должна измерять столько непрерывно меняющихся переменных, характеризующих течение процесса управления во времени, каков общий порядок дифференциальных уравнений системы, что далеко не всегда возможно.
Однако теория оптимальных процессов нужна для расчета «теоретических эталонов», показывающих, что можно максимально взять из данной системы при данном критерии ее качества и при заданных ограничениях. К такому эталону на практике можно приближаться путем введения более простых нелинейных законов управления, о которых говорилось выше. Таким образом, могут создаваться системы, в том или ином смысле близкие к оптимальным, но достаточно простые для практической реализации.