

18.4. Компенсация влияния нелинейностей.
Метод коррекции, основанный на применении обратных нелинейностей.
Суть метода в том, что для компенсации влияния той или иной нелинейности в цепь системы включается статическое звено, имеющее характеристику, компенсирующую исходную. В результате суммарная характеристика линейна. Здесь возможны последовательная и параллельная коррекции.
На рис. 18.2
показано,
как осуществляется компенсация
характеристики нелинейного элемента
![]() путем параллельного включения добавочного
нелинейного элемента с характеристикой
путем параллельного включения добавочного
нелинейного элемента с характеристикой![]() ,
выполняемого
в виде модели.
,
выполняемого
в виде модели.

Рисунок 18.2.
Таким образом,
если х
— синусоидальный
сигнал, то сигналы у1
и у2
в сумме
тоже должны давать синусоидальный
сигнал у.
Следовательно,
эти параллельно соединенные нелинейные
элементы могут быть заменены линейным
элементом. Однако полученное решение
не может быть практически реализовано.
Если, например, нелинейный элемент с
![]() соответствует усилителю мощности с
ограничением, то элемент с
соответствует усилителю мощности с
ограничением, то элемент с![]() соответствует усилителю, который при
большой мощности не имеет насыщения.
Но в таком случае не нужен первый
усилитель.
соответствует усилителю, который при
большой мощности не имеет насыщения.
Но в таком случае не нужен первый
усилитель.
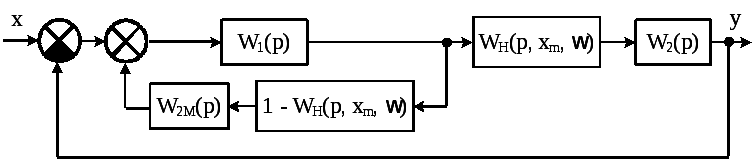
Реализуемой
является схема (рис. 18.3,а),
где устройства с ![]() и W2М(p)
включаются в маломощный контур обратной
связи. Элемент W2M(p)
‑ модель реального элемента основной
W2(p)
с той же
характеристикой. На рис. рис. 18.3,б
представлена эквивалентная схема,
соответствующая схеме, изображенной
на рис. 18.3,а.
и W2М(p)
включаются в маломощный контур обратной
связи. Элемент W2M(p)
‑ модель реального элемента основной
W2(p)
с той же
характеристикой. На рис. рис. 18.3,б
представлена эквивалентная схема,
соответствующая схеме, изображенной
на рис. 18.3,а.

а)
 б)
б)
Рисунок 18.3
Характеристическое уравнение в этом случае имеет вид
![]()
Выбирая модель с
![]() ,
а
,
а ![]() ,
превращаем характеристическое уравнение
в линейное:
,
превращаем характеристическое уравнение
в линейное:
![]() .
.
В результате
указанной компенсации на уровне малой
мощности устраняется влияние нелинейности
в цепи обратной связи и в цепи измерения.
На практике иногда необходимо выходную
величину (на уровне большой мощности)
определять грубо, но измерять значение
отрабатываемого системой сигнала точно
(например, за счет люфта антенна может
покачиваться, но азимут измеряется
точно благодаря компенсации на уровне
малой мощности). Вместе с тем нелинейность
вида ![]() не всегда можно реализовать. Кроме того,
эффективность подобной компенсации во
многом зависит от свойств линейной
части системы, стабильности параметров
линейной и нелинейной частей системы
и места включения корректирующего
элемента.
не всегда можно реализовать. Кроме того,
эффективность подобной компенсации во
многом зависит от свойств линейной
части системы, стабильности параметров
линейной и нелинейной частей системы
и места включения корректирующего
элемента.
Применение компенсирующих форсирующих устройств.
Принцип применения компенсирующих устройств иллюстрируется схемой, приведенной на рис.18.4.

Рисунок 18.4. Применение компенсирующих устройств
Параллельно
нелинейному элементу включается модель
линейного элемента (– WЛЭ(p))
с желаемой характеристикой. Сигналы
нелинейного элемента и линейного
элемента сравниваются и через форсирующий
элемент с W3(p)
подаются в прямую цепь. Если
![]() ,
то на вход схемы поступает отрицательный
сигнал, уменьшающий
,
то на вход схемы поступает отрицательный
сигнал, уменьшающий![]() ;
если
;
если![]() ,
то компенсирующий сигнал – положительный,
увеличивающий
,
то компенсирующий сигнал – положительный,
увеличивающий![]() .
За счет компенсирующего контура
обеспечивается равенство
.
За счет компенсирующего контура
обеспечивается равенство![]() ,
т.е. устранение влияния нелинейности
на работу системы.
,
т.е. устранение влияния нелинейности
на работу системы.
ПФ системы в разомкнутом состоянии без компенсации имеет вид
![]()
При наличии цепи компенсации
![]()
При условии, что
![]() нелинейный элемент влияния на
характеристики системы не оказывает,
т. е.
нелинейный элемент влияния на
характеристики системы не оказывает,
т. е.
![]()
Часто желательно
иметь ![]() ,
тогда
,
тогда
![]()
Реализация таких систем вызывает ряд трудностей, и полная компенсация влияния нелинейности, как правило, невозможна. Действительно, элемент с характеристикой W3(p) должен быть в общем случае дифференцирующим, что невозможно или трудновыполнимо; кроме того, для устойчивой работы система должна быть грубой.
Несмотря на указанные трудности, данный метод позволяет в достаточной степени ослабить действие нелинейного элемента типа зона нечувствительности, люфт и др.