

4 Синтез системи регулювання швидкості
Розрахунок і синтез контуру регулювання струму збудження.
С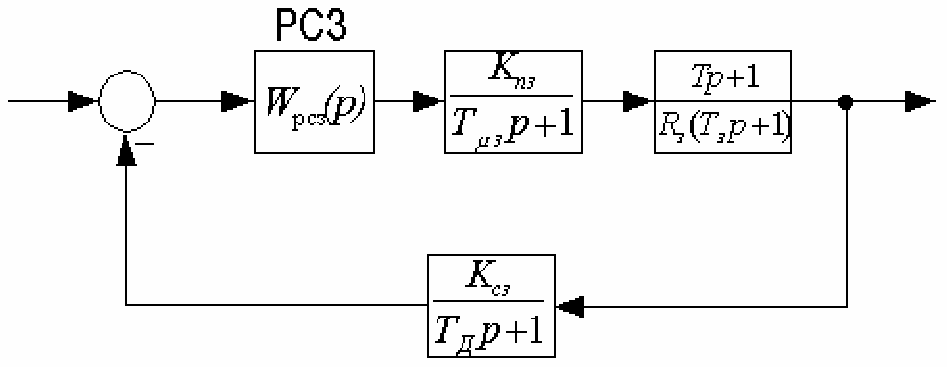 труктурна
сема регулювання КРСЗ наведена на
рисунку 3.3
труктурна
сема регулювання КРСЗ наведена на
рисунку 3.3
Рисунок 4.1 – Структурна схема контуру регулювання струму збудження.
З умови компенсації великих сталих часу приймаємо ПІ-регулятор струму збудження з передавальною функцією:
![]() (4.1)
(4.1)
Згідно з модульним оптимумом Тсз=2·Тμ2=2·0.003=0.006 с (Тμ2 – мала некомпенсована стала часу).
Максимальна ЕРС тиристорного збуджувача:
![]() (4.7)
(4.7)
Коефіцієнт підсилення тиристорного перетворювача у колі збудження:
![]() (4.8)
(4.8)
де Uкер – максимальна напруга керування СІФК.
Коефіцієнт зворотного зв’язку за струмом збудження
![]() (4.9)
(4.9)
де Uмах – максимальна вихідна напруга давача.
Отримаємо таку передавальну функцію замкненого контуру регулювання
струму збудження:
 (4.10)
(4.10)
4.2 Синтез контуру регулювання струму якоря.
Структурна схема контуру регулювання струму якоря має вигляд:

Рисунок 4.2 − Структурна схема контуру регулювання струму якоря.
Як і в контурі регулювання струму збудження передавальну функцію
регулятора струму якоря обираємо ПІ−типу з передавальною функцією:
![]() (4.11)
(4.11)
По принципу налагодження контуру на модульний оптимум, сталу часу
інтегрування контуру регулювання струму якоря обираємо:
![]() (4.12)
(4.12)
Коефіцієнт зворотного зв’язку по струму КС обираємо таким, щоб при струмі упора (Iуп=2∙Iн=2∙1190=2380 А) вихідний сигнал не був максимально
можливим для УБСР−АВ, а з запасом на перерегулювання:
![]() (4.13)
(4.13)
Так як у передавальній функції об’єкта регулювання входить частота обертання двигуна ω, яка може змінюватися у великих межах, то система нелінійна. Лінеаризацію проводимо шляхом компенсації у регулюючої частини контуру зміни цього параметра, необхідно поділити вихідний сигнал регулятора струму на сигнал, пропорційний швидкості. Для цього використовуємо блок ділення. Лінеаризація контуру регулювання струму якоря зображена на рисунку 4.3.
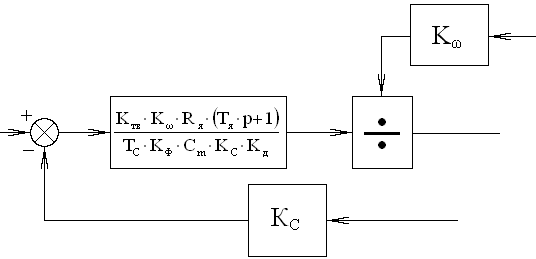
Рисунок 4.3 − Лінеаризація контуру регулювання струму якоря.
Коефіцієнт нахилення кривої намагнічування КФ змінюється в наслідку не лінійності кривої намагнічування. Оскільки система працює у зоні ослабленого поля, на лінійній частині кривої, КФ приймаємо сталим.
Коефіцієнт Кд – передавальний коефіцієнт елемента ділення.
Отримаємо таку передавальну функцію замкненого контуру регулювання
струму якоря:
![]() (4.14)
(4.14)
4.3 Синтез контуру регулювання швидкості.
Структурна схема контуру регулювання швидкості має вигляд:
Рисунок 4.4 − Структурна схема контуру регулювання швидкості.
Стала часу Тω=17 мс − це стала часу інерційності фільтру, встановленого на виході тахогенератора та призначеного для обмеження пульсацій його вихідної напруги.
Для отримання астатизму другого ступеня по керуванню, та першого ступеня по збудженому впливу, систему налагоджуємо на симетричний оптимум. Для цього використовуємо регулятор швидкості ПІ–типа з передавальною
функцією:
![]() (4.15)
(4.15)
де bc=2 для симетричного оптимуму.
Стала часу інтегрування контуру регулювання швидкості з врахуванням інерційного зв’язку:
![]() (4.16)
(4.16)
Як
і контур регулювання струму якоря,
контур регулювання швидкості містить
не лінійність, так як магнітний потік
Ф змінюється у великих межах. Щоб
лінерізувати контур, вихідний сигнал
регулятора швидкості помножується на
сигнал, пропорційний ![]()
![]() знаходиться
у передавальній функції регулятора
швидкості. Схема лінеаризації контуру
регулювання швидкості зображена на
рисунку 3.6.
знаходиться
у передавальній функції регулятора
швидкості. Схема лінеаризації контуру
регулювання швидкості зображена на
рисунку 3.6.
Рисунок 4.5 − Лінеаризація контуру регулювання швидкості.
Номінальна проти−ЕРС двигуна:
![]() (4.17)
(4.17)
Коефіцієнт передачі блока умноження Км залежить від самого елемента.
Коефіцієнт зворотного зв’язку по швидкості обираємо також з запасом на
перерегулювання:
(4.18)
![]()