

1 Опис систем двухзонного регулювання
Системи двузонного керування знайшли широке застосування в різноманітних сферах вробництва. Такі системи використовуються в електроприводах призначних для механізмів станків, приводах головних механізмів подач металообробних станків, приводах головних та допоміжних механізмів прокатного виробництва!
В системах двузоннго керування зміна швидкості до номінальної забезпечується за рахунок зміни напруги на якорі двигуна при постійному потоці збудження, а регулювання у верхній частині діапазону – за рахунок в дії на поток при постійнїй напрузі чи ЕРС двигуна.
В системах двозонного керування застосовують залежне та параметричне керування полем двигуна.
Функціонально схема системи керування збудженням двигуна представлена на рисунку 1.1, де позначені: Д – двигун, ЗІ – задатчик інтенсивності, ТПЯ, ТПЗ – тиристирной перетворювач в ланцюгу якорю та збудження, РШ, РС, РЕ, РЗ, ДШ, ДС, ДЕ, ДЗ – регулятори та датчики швидкості, струму якоря, ЕРC та збудження відповідно, БВМ – блок виділення модулю.

Рисунок 1.1 – Функціональна схема системи із залежним керуванням полем двигуна
Ця система включає дві взаємозв'язані підсистеми: а) підсистему регулювання швидкості з регулятором швидкості (РШ) і підлеглим контуром регулювання струму якоря (КРС) що впливає на ТПЯ; б) підсистему регулювання ЕРС з регулятором ЕРС (РЕ) і підлеглим контуром регулювання струму (потоку) збудження ( КРЗ) що впливає на ТПЗ.
Для
забезпечення нормальної роботи приводу
виходи РШ
і РЕ повинні бути обмежені: РШ
- па рівні, відповідному максимально-допустимому
струму якоря двигуна, а РЕ - на рівні,
відповідному номінальному струму
збудження
![]() .
.
Зв'язок
другої підсистеми з першою здійснюється
через ЕРС
двигуна. Управління швидкістю обертання
двигуна у всьому діапазоні проводиться
зміною одного сигналу - завдання за
швидкістю
![]() на вході першої підсистеми.
на вході першої підсистеми.
Поки
двигун працює на швидкості нижче
основної, значення ЕРС
двигуна менше номінального. Задаюча
напруга контура ЕРС
![]() вибирається рівним вихідній напрузі
ДЕ при поминальній ЕРС
двигуна. Тому при
вибирається рівним вихідній напрузі
ДЕ при поминальній ЕРС
двигуна. Тому при![]() ,
регулятор ЕРС
знаходиться в насиченні, а струм збудження
двигуна підтримується рівним номінальному.
Коли швидкість і ЕРС
двигуна досягають номінального значення,
РЕ виходить з насичення, і контур
регулювання ЕДС
замикається. З цієї миті система прагне
підтримати ЕДС
двигуна постійною, а подальше збільшення
швидкості відбувається в основному за
рахунок ослаблення поля.
,
регулятор ЕРС
знаходиться в насиченні, а струм збудження
двигуна підтримується рівним номінальному.
Коли швидкість і ЕРС
двигуна досягають номінального значення,
РЕ виходить з насичення, і контур
регулювання ЕДС
замикається. З цієї миті система прагне
підтримати ЕДС
двигуна постійною, а подальше збільшення
швидкості відбувається в основному за
рахунок ослаблення поля.
Пуск може здійснюватися при контролі струму, тобто в режимі струмообмеження (задатчик інтенсивності відсутній, регулятор швидкості в насиченні) і при контролі швидкості (під управлінням задатчика інтенсивності). При роботі від ЗІ з постійним темпом зміни вихідного сигналу підтримується постійний динамічний момент, а при використанні ЗІ з регульованим у функції потоку темпом зміни вихідного сигналу постійний динамічний струм.
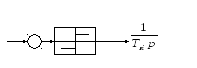

Рисунок 1.2 – структурні схеми задавачів інтенсивності, забезпечуючих розгін системи
а) з постійним динамічним моментом,
б) з постійним динамічним струмом
Тиристорні
перетворювачі представляємо у вигляді
аперіодичних ланок з однаковою постійною
часу
![]() ,
яку при нормуванні приймаємо як базову
величину. Відповідно до цього
,
яку при нормуванні приймаємо як базову
величину. Відповідно до цього
![]() .
(1.1)
.
(1.1)
Контур регулювання збудження може замикатися по потоку збудження або по його струму.
Датчики струму якоря, потоку збудження і швидкості вважатимемо безінерційними.
![]() (1.2)
(1.2)
а датчики струму збудження і ЕРС - інерційними:
![]() (1.3)
(1.3)
![]() (1.4)
(1.4)
Передавальні функції регуляторів у відносних одиницях (в.о.) відповідно до принципу підлеглого регулювання параметрів мають вигляд:
![]() (1.5)
(1.5)
![]() (1.6)
(1.6)
![]() (1.7)
(1.7)
![]() (1.8)
(1.8)
![]() (1.9)
(1.9)
де
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() - постійні часу інтеграції відповідних
контурів.
- постійні часу інтеграції відповідних
контурів.
Як видно з формул (1.5) - (1.9) передавальні функції регуляторів швидкості, потоку і струму збудження і ЕРС містять змінні параметри.
Для лінеаризації відповідних контурів необхідно ускладнювати структуру регуляторів. У простому випадку змінні параметри замінюють деякими постійними величинами. З умови забезпечення найбільшого запасу стійкості у всьому діапазоні регулювання швидкості приймемо як розрахункових наступні значення змінних параметрів:
![]() ,
,![]() (1.10)
Системи
з параметричним управлінням полем
двигуна використовують в основному в
системах непрямого регулювання швидкості
(за відсутності ДС).
(1.10)
Системи
з параметричним управлінням полем
двигуна використовують в основному в
системах непрямого регулювання швидкості
(за відсутності ДС).
Рисунок 1.3 – Фунуціональна схема системи з роздільним керуванням полем двигуна
Як видно з рисунку. 1.3, в системі з параметричним управлінням замість контура регулювання швидкості в головному каналі використовується контур ЕРС або напруга. А підсистема збудження має тільки один контур (відсутній контур ЕРС). Наявність задавача інтенсивності - необхідна умова нормальної роботи цієї системи. Перехід в другу зону здійснюється за допомогою зада збудження ЗЗ. Для нормальної роботи необхідний також розділовий підсилювач РП, що обмежує завдання на ЕРС двигуна на рівні, відповідному ЕРС холостого ходу.
Датчики і регулятори в цій системі мають такі ж передавальні функції, як і в системі із залежним управлінням.
Для розуміння роботи системи необхідно розглянути діаграми нелінійних елементів ЗІ, РП і ЗЗ у функції часу, зображені на рисунку 1.4
Рисунок 1.4 – Діаграми роботи нелінійних елементів
Тут
![]() -
час наростання вихідного сигналу ЗІ
до рівня відповідного рівню ідеального
холостого ходу на природній механічній
характеристиці, тобто при номінальному
потоці збудження.
-
час наростання вихідного сигналу ЗІ
до рівня відповідного рівню ідеального
холостого ходу на природній механічній
характеристиці, тобто при номінальному
потоці збудження.
З
діаграм видно, що при
![]() працює тільки КРЕ при
працює тільки КРЕ при
![]() ,
а при
,
а при
![]() працює КРЗ
при
працює КРЗ
при
![]() .
.
Для цієї схеми необхідно визначити аналітичний вираз для статичної характеристики 3З.
Вид
цієї характеристики залежить від того,
який з параметрів при розгоні ми хочемо
підтримувати постійним: динамічний
момент
![]() і
прискорення або динамічний струм
і
прискорення або динамічний струм
![]()
Виведемо характеристики 3З для двох варіантів.
a) PP
з
![]()
Вихідний сигнал задатчик інтенсивності змінюється згідно із законом:
![]() (1.11)
(1.11)
де
![]() -
прискорення приводу:
-
прискорення приводу:
![]() (1.12)
(1.12)
З
умови постійності ЕРС
в другій зоні, тобто при
![]()
![]() ,
потік повинен змінюватися згідно із
законом:
,
потік повинен змінюватися згідно із
законом:
![]() (1.13)
(1.13)
Якщо нехтувати інерційністю КРПЗ, можна рахувати що і завдання на потік повинне змінюватися приблизно по такому ж закону:
![]() (1.14)
(1.14)
Оскільки
ми прагнемо підтримувати якесь задане
значення динамічного моменту постійним
(![]() )
то, нехтуючи інерційністю КРЕ. можна
вважати, що
)
то, нехтуючи інерційністю КРЕ. можна
вважати, що
![]() ,
тобто система відпрацьовує сигнал ЗІ
без запізнювання. Тоді рівняння вихідної
характеристики 3З в другій зоні можна
записати в наступному вигляді:
,
тобто система відпрацьовує сигнал ЗІ
без запізнювання. Тоді рівняння вихідної
характеристики 3З в другій зоні можна
записати в наступному вигляді:
![]() (1.15)
(1.15)
В той же час при роботі в першій зоні вихідний сигнал 3З повинен бути постійним і відповідати номінальному потоку збудження. Все це можна записати до виді рівняння:
 (1.16)
(1.16)
б)
3З з
![]()
Вихідна характеристика ЗЗ в першій зоні відома, - вона постійна і відповідає номінальному потоку збудження. Визначимо вихідну характеристику ЗЗ в другій зоні з умови:
![]() (1.17)
(1.17)
Оскільки
динамічний момент
![]() пропорційний
заданому прискоренню розгону
ЗІ
пропорційний
заданому прискоренню розгону
ЗІ
![]() ,
означає відношення прискорення
,
означає відношення прискорення
![]() до
потоку збудження
до
потоку збудження
![]() теж
повинен бути постійним:
теж
повинен бути постійним:
![]() (1.18)
(1.18)
Прискорення є не що інше, як похідна за часом від швидкості:
![]()
![]() (1.19)
(1.19)
Інтегруючи вираз за часом, отримаємо:
![]() (1.20)
(1.20)
Оскільки з рівняння (1.11)
![]() (1.21)
(1.21)
то
![]() (1.22)
(1.22)
Підставляючи останній вираз в рівняння (1.20), одержимо:
![]() (1.23)
(1.23)
З
умови постійності ЕРС
![]() слідує:
слідує:
![]() (1.24)
(1.24)
Далі:
![]() (1.25)
(1.25)
Продиферинцюємо
обидві частини цього рівняння по
![]() :
:
 (1.26)
(1.26)
Преобразуємо останній вираз до вигляду зручному для інтеграції:
![]() (1.27)
(1.27)
і проінтегруємо:
![]() (1.28)
(1.28)
Вирішуючи
рівняння з однією змінною відносно
![]() ,
одержимо вираз для визначення вихідної
характеристики ЗЗ з
,
одержимо вираз для визначення вихідної
характеристики ЗЗ з
![]() в
другій зоні:
в
другій зоні:
![]() (1.29)
(1.29)
У
загальному вигляді (для обох зон
регулювання) рівняння вихідної
характеристики ЗЗ
![]() можна
записати таким чином:
можна
записати таким чином:
 (1.30)
(1.30)
Оскільки в цьому режимі рівняння (1.15) порушується, тобто
![]() (1.31)
(1.31)
то стале значення швидкості не відповідатиме вихідному сигналу ЗІ:
![]() (1.32)
(1.32)
Це є недоліком даного варіанту ЗЗ.
У сталому режимі роботи приводу заданий потік рівний:
![]() (1.33)
(1.33)
где: d – діапазон послабшаня поля,
![]() (1.34)
(1.34)
Підставляючи
вираз (1.33) в (1.29) і рішаючи його відносно
![]() отримаємо:
отримаємо:
![]() (1.35)
(1.35)
З
виразу (1.35)
слідує,
що для отримання діапазону ослаблення
поля d
рівного
двом необхідно на вхід ЗІ
подати сигнал рівний:
![]() .
що
в абсолютних одиницях відповідає двом
з
половиною номіналам швидкості.
.
що
в абсолютних одиницях відповідає двом
з
половиною номіналам швидкості.
Щоб уникнути цієї невідповідності, в даній системі необхідно застосовувати ЗІ з темпом зміни вихідного сигналу, залежним від потоку збудження або сигнала завдання на нього. Один з можливих варіантів такого ЗІ приведений на рисунку 1.26.
2 РОЗРАХУНОК СИСТЕМИ ДВУХЗОННОГО РЕГУЛЮВАННЯ ШВИДКОСТІ З ЗАЛЕЖНИМ КЕРУВАННЯМ
2.1 Розрахунок параметрів контуру регулювання струму збудження
Завданням для КРСЗ є напруга, отримана з датчику струму збудження. Коефіцієнт пердачі датчику КРСЗ дорівнює:
![]() (2.1)
(2.1)
де UДСЗ =10 В.
Схема заміщення обмотки збудження двигуна має вигляд:

Рисунок 2.1 – Схема заміщення обмотки збудження двигуна
Тут: RЗ − повний опір ланцюга збудження, LЗ − індуктивність обмотки збудження, Rд − опір контуру, що демпфірує (цей опір ураховує втрати від вихрових струмів у статорі двигуна) , IЗ − повний струм ланцюга збудження, IЗ’ − струм, що намагнічує, Iд − струм контуру, що демпфірує (вихровий струм).
На основі правил розрахунку електричних ланцюгів можна записати:
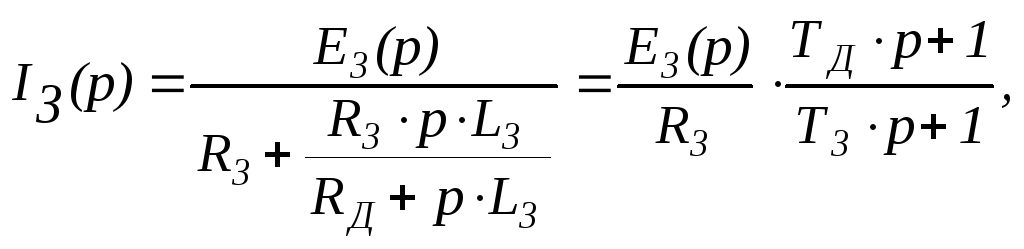 (2.2)
(2.2)
де Тд − постійна часу контуру вихрових струмів, ТЗ − постійна часу ланцюга збудження.
![]()
![]() (2.3)
(2.3)
Величина струму, що намагнічує, Iз' являє собою частину струму збудження, і перебуває з вираження:
![]() (2.4)
(2.4)
Величина магнітного потоку перебуває із кривої намагнічування по струму намагнічування.

Рисунок 2. Крива намагнічування обмотки збудження
Линеаризуючи цю криву, можна записати:
![]() (2.5)
(2.5)
З урахуванням допоміжних залежностей, структурна схема ланцюга збудження двигуна буде мати вигляд:

Рисунок 2.3 - Структурна схема ланцюга збудження двигуна.
Якщо при аналізі величина струму збудження не використається, то цю структурну схему можна згорнути до більше простого виду:
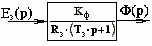
Рисунок 2.4 - Згорнута структурна схема ланцюга збудження двигуна.
У практичних розрахунках при визначенні чисельних значень параметрів ланцюга збудження, можна скористатися наступними формулами:
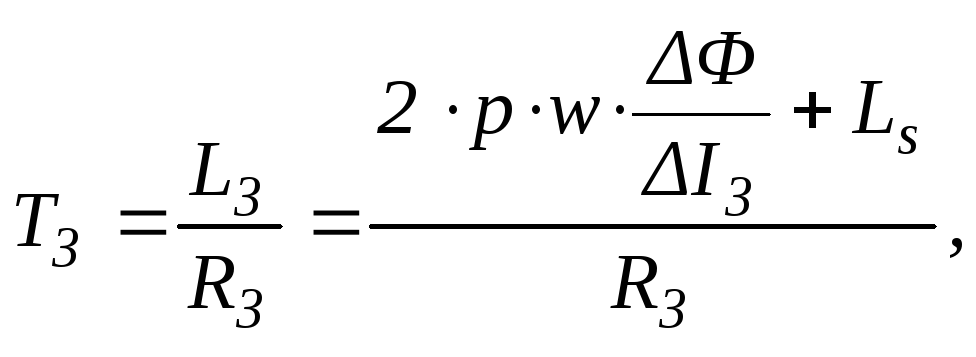 (2.6)
(2.6)
де p − число пар полюсів, ∆Ф й ∆IЗ збільшення потоку й сили струму збудження, Ls − індуктивність розсіювання.
Індуктивність розсіювання визначається по формулі:
![]() (2.7)
(2.7)
де Фsн − потік розсіювання при номінальному струмі збудження. IЗН − номінальний струм збудження двигуна. Фsн звичайно вказується в формулярі двигуна.
При відсутності цих даних можна використати формулу:
![]() (2.8)
(2.8)
де δ – коефіцієнт розсіювання,
![]() ,
Вδ –
індукція в повітряному зазорі, Фн
– номінальний потік збудження.
,
Вδ –
індукція в повітряному зазорі, Фн
– номінальний потік збудження.
Постійна часу контуру вихрових
струмів:
![]()
![]()