

5.4 Реалізація регулятора швидкості.
У реалізації РШ використовуємо ячейку РС−1АИ, зображену на рисунку 5.4.
Передавальна функція регулятора швидкості має вигляд:
 (5.15)
(5.15)
де Kм=0.1 − коефіцієнт передачі ячейки МД−3АИ ([3]).
Необхідні параметри маємо за допомогою ОУ А1 та ОУ А5. Встановлюємо
С15=С16=5 мкФ, R41=21180 Ом. Отримаємо передавальну функцію ОУ А5:
![]() (5.16)
(5.16)
де Т4=(С15+С16)∙R41=(5+5)∙10−5∙1252) =0.1252 c. (5.17)
При R24=2426.2 Ом отримаємо коефіцієнт підсилення ОУ А1:
![]() (5.18)
(5.18)
При послідовному з’єднанні ОУ А1 та ОУ А2 маємо:
![]() (5.19)
(5.19)
Сигнал Uвих МД−3АИ обмежується на рівні 8 В за допомогою ОУ А3 та ОУ А4 ячейки РС−1АИ. Ячейка датчика напруги та ячейка підсилювача зображені на рисунках 5.5 та 5.7.
5.5. Реалізація задавача інтенсивності.
Для формування плавної зміни сигналу завдання швидкості при розгоні та гальмуванні привода використовуємо задатчик інтенсивності. Час розгону привода розраховуємо при навантаженні на валу М=0.3∙Мн:
 (5.20)
(5.20)
У системі керування використовуємо ячейку ЗИ−3АИ, зображену на рисунку 5.3. Час розгону та гальмування приводу при роботі від ЗІ однакові. Темп
інтегрування встановлюється за допомогою С7 та R16 (C7=100 мкФ, R16=80000 Ом):
![]() (5.21)
(5.21)
Максимальна вихідна напруга ЗІ:
![]() (5.22)
(5.22)
6. Моделювання системи керування.
Для перевірки реалізації заданих умов розгону проектує мого приводу необхідно його промоделювати. Моделювання системи виконано у відносних величинах. За базисну сталу часу приймаємо Тμ. Далі розраховуємо параметри
моделі, зображеної на рисунку 6.1.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() bC=2,
Uiwin=1,
Uout=1
bC=2,
Uiwin=1,
Uout=1
Визначимо кратність струму короткого замикання.
![]() (5.1)
(5.1)
![]() (5.2)
(5.2)
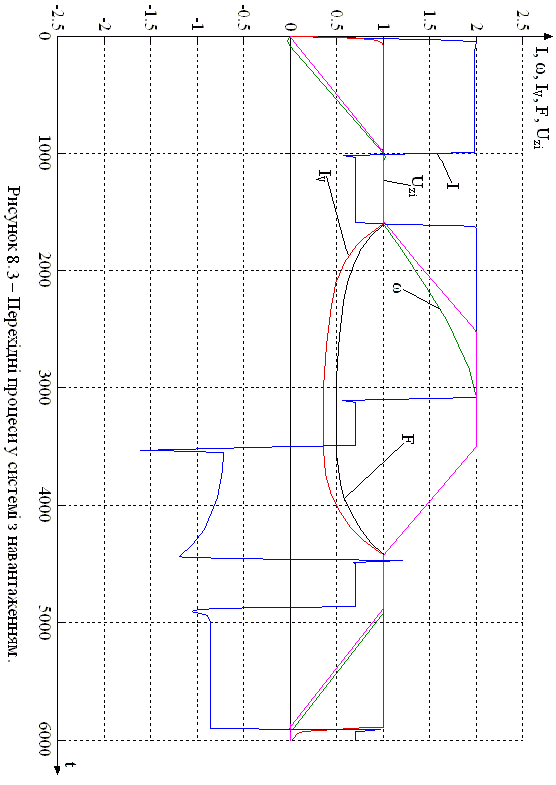
При моделюванні системи були досліджені пуск, реверс, та гальмування без навантаження та під навантаженням. Отримані графіки перехідних процесів зображені на рисунках 5.2 та 5.3.

ВИСНОВОК
В ході курсової роботи була спроектована однозонна система керування швидкості приводу постійного струму, були синтезовані регулятори струму якоря та струму збудження, швидкості та ЕРС на основі комірок УБСР–АИ.
В якості тиристорного електроприводу був обраний електропривод серії
КТЕУ – 1600/825 – 1231110 –УХЛ4
Регулятори були зібрані на базі комірок РТ–1АИ, РС–1АИ, ДН–2АИ, ДТ–3АИ, ЗИ–2АИ.
Були спрацьовані пропорційно-інтегральні регулятори струму і швидкості, що забезпечує відпрацьовування без похибки у встановленому режимі.