

Донецький національний технічний університет Кафедра “Основи проектування машин”
ЗВІТ
ПРО ВИКОНАННЯ ЛАБОРАТОРНОЇ РОБОТИ № 6 ”Вивчення конструкції редуктора”
Виконавець студент |
|
|
|
Дата |
група |
|
|
|
|
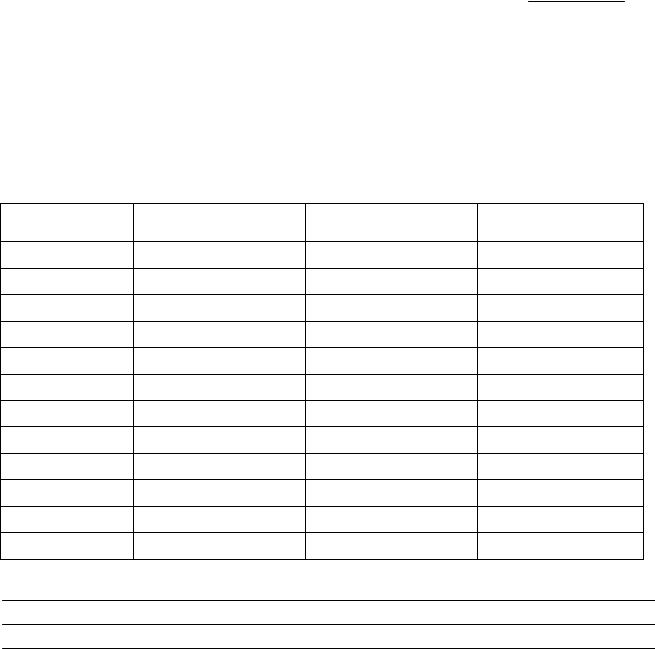
Рисунок 1 - Ескіз редуктора
1. Результати визначення геометричних параметрів зубчастих коліс
Параметр |
1 передача |
2 передача |
3 передача |
Z1
Z2
u, i
m
x1
x2
d1w
d2w
da1
da2
aw
β
Опис редуктора:
Висновки:
Викладач |
Студент |
||
|
Підпис |
|
Підпис |
|
|
55 |
|
ЛАБОРАТОРНА РОБОТА №7
“Комп’ютерний синтез стандартизованого приводу машини”
Ціль роботи. Комплектація приводу машини зі стандартизованих модулів – двигуна, зубчастого редуктора, муфт, клинопасової або ланцюгової передач, яка здійснюється за допомогою комп’ютерної програми “Привод-6” на основі заданого критерію оптимізації.
Матеріальне забезпечення заняття. Плакати конструкцій зубчастих редукторів, клинопасових, і ланцюгових передач, типових приводів машин, комп’ютер із відповідним програмним забезпеченням.
Тривалість заняття – 2 години.
7.1. Основні теоретичні відомості про визначення параметрів приводів машин
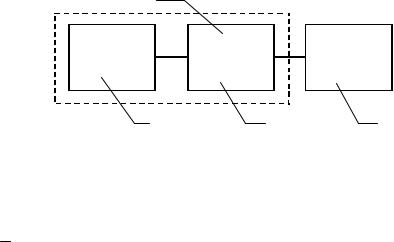
Кожну машину можна умовно представити у вигляді трьох послідовно зв’язаних блоків (рис. 7.1): двигун, робочій орган, перетворювальний механізм.
Двигун перетворює той чи інший вид енергії – електричну, гідравлічного або пневматичного тиску в механічну енергію, як правило, обертального руху. Широке розповсюдження обертального руху пояснюється його дуже важливою перевагою – можливістю існування на протязі майже необмеженого часу.
Механічна енергія обертального руху характеризується такими парамет-
4
1 |
3 |
2 |
Рисунок 7.1 – Схема машини 1 – двигун, 2 – робочій орган, 3 – перетворювальний механізм, 4 – привід машини
рами: T (Нм) - обертальний момент, який може створити двигун при стабіль-
ній роботі, ω (1c) - кутова швидкість ротору двигуна, N = Tω (Вт) - потужність
двигуна, яку він може віддати при стабільній його роботі.
Слід відмітити, що найбільш розповсюджені в промисловості електричні двигуни характеризуються відносно невеликими обертальними моментами і значними кутовими швидкостями.
Робочій орган безпосередньо виконує корисну роботу, тобто це орган, за ради роботи якого створена машина. Наприклад: конвеєр з ведучою ланкою у вигляді зірки або барабану, патрон металорізального верстату, шнек вугільного комбайну, валки прокатного стану тощо. Як правило, вихідний ланцюг робочого органу обертається з порівняно невеликою кутовою швидкістю але з досить значним обертальним моментом.
56
Таким чином, найчастіше параметри механічної енергії на валу електродвигуна (T і ω) не співпадають з параметрами, потрібними для нормальної роботи робочого органу. І тільки в окремих випадках (наприклад для вентилятора, лопаті якого закріплені безпосередньо на валу двигуна) ці параметри повністю співпадають.
Для вирішення цієї проблеми використовується перетворювальний механізм, який узгоджує параметри механічної енергії на валу електродвигуна з параметрами, потрібними для нормальної роботи робочого органу. Це узгодження забезпечується за допомогою редукторів з циліндричними, конічними або черв’ячними передачами, а також клинопасових або ланцюгових передач.
Комплекс пристроїв, до якого входять двигун і перетворювальний механізм, називається приводом машини. Привід найчастіше комплектується із стандартизованих блоків (з метою зниження вартості виготовлення).
В зв’язку з тим, що частина механічної енергії губиться у приводі, потужність на веденому валу приводу (тобто на ведучому валу робочого органу) менше, чим на валу двигуна:
N ро = Nдηпр, |
(7.1) |
де ηпр - коефіцієнт корисної дії приводу (ККД).
Коефіцієнт ККД приводу визначається як здобуток k коефіцієнтів блоків приводу ηi , де має місце втрати енергії – ступені окремих передач, підшипники
тощо:
k
ηпр = ∏ηi = η1 η2 ... ηk . (7.2) i=1
Залежність (7.1) можна виразити через співвідношення кутових швидкостей і обертальних моментів:
Tроωро =Tдωдηпр , |
(7.3) |
звідки можна визначити основні параметри електродвигуна:
T |
= |
Tро |
; |
|
iпрηпр |
||||
д |
|
(7.4) |
ωд = ωроiпр,
де iпр - передатне відношення приводу, яке визначається на основі підбо-
ру з баз даних стандартизованих модулів.
Оскільки задача вибору параметрів приводу має велику кількість варіантів, то вибір виконується за вимогами заданого критерію оптимізації.
7.2. Основні відомості про програму “Привод-6”
Навчальна прикладна програма “Привод-6” (розроблена на кафедрі “Основи проектування машин” ДонНТУ) призначена для реалізації алгоритму проектних розрахунків основних параметрів вузлів приводу та вибору з баз даних стандартних модулів з відповідною перевіркою умов їх працездатності. Про-
57
грама дозволяє розробити та проаналізувати до 12 варіантів конструкцій приводу і при цьому суттєво зменшити час їх розробки. З огляду на навчальний характер програмного продукту, право вибору оптимального рішення надано безпосередньо користувачу.
Робота з програмою зводиться до вибору і введення відповідних команд з клавіатури. Результати розрахунків подаються на екрані монітора в текстовому або графічному вигляді.
Команди можна вводити двома засобами:
-вибором з рекомендованих варіантів сполучення клавіш, які висвітлюються у нижньому рядку екрана;
-вибором команди клавішами керування курсором (←, ↑, →, ↓) з меню команд; після вибору потрібної команди слід дати команду на її виконання натискуючи на клавішу "Enter".
Першою командою в списку команд меню завжди стоїть команда повернення до виконання попереднього етапу програми. У такий спосіб можна поетапно повернутися від кінця програми до її початку - тексту завдання на проектування.
Останньою командою в меню команд є команда "Выход из программы". При відданні такої команди обов'язково з'явиться запит на підтвердження цього рішення. І тільки при повторному підтвердженні відбудеться повернення до заставки з титрами програми "Привод-6" з обнулінням усіх вхідних даних і результатів розрахунку.
При необхідності в довідковому рядку з'являється інформація, що допомагає зробити правильний вибір.
У випадку прийняття неправильних рішень на екран у спеціальному вікні видається відповідна інформація в залежності від ступеня впливу помилки на наступні розрахунки.
При серйозних помилках, неприпустимих для подальшої роботи програми, інформаційне вікно з'являється з титром "Ошибка!" і його поява супроводжується тривожним звуковим сигналом. Повідомляється про самий факт помилки і даються рекомендації що до її усунення. До усунення причини цієї помилки подальша робота програми неможлива.
При помилках не критичних для роботи приводу (наприклад - при необхідній потужності двигуна 5.1 кВт прийнято двигун з номінальною потужністю 7 кВт) інформаційне вікно з'являється з титрами "Внимание!" і без звукового супроводу. Як правило це випадки, коли робота приводу можлива, але буде неекономічною. Якщо мається необхідність у прийнятті такого рішення, необхідно підтвердити, що воно прийнято свідомо.
У випадку неочевидності в ухваленні рішення необхідно переходити до команди "Запрос о помощи".
7.3.Отримання завдання на проектування приводу
івведення вихідних даних
Першим кроком є запуск програми за допомогою двократного натискання мишкою відповідної піктограми на робочому столі комп’ютера. Подальша ро-
58
бота виконується за допомогою підказок, які поступово з’являються на самому нижчому текстовому рядку.
Програма "Привод-6" передбачає два режими отримання завдання на проектування приводу:
-завдання на проектування готується програмою "Привод-6";
-текст завдання студент отримує безпосередньо від викладача.
Упершому випадку необхідно перевести клавіатуру на російський шрифт
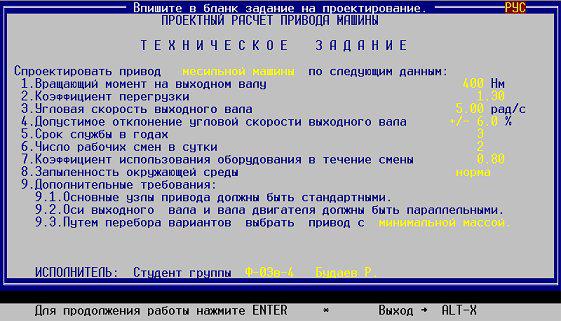
іввести два текстових параметри - шифр академічної групи і прізвище студента. Програма "Привод-6" готує завдання на проектування, користуючись літерами прізвища як кодом доступу до баз вихідних даних. Текст завдання з’являється на екрані монітора (рис. 7.2). Цей текст треба переписати в бланк звіту про виконання лабораторної роботи і після дозволу викладача продовжити роботу з програмою.
Рисунок 7.2 – Взірець тексту завдання на проектування приводу машини, підготовленого програмою “Привод-6”
У другому випадку ті ж самі дані, які перелічені в тексті завдання на проектування приводу для попереднього випадку, вводяться з клавіатури.
У процесі роботи з програмою варто записувати в зошит номери і назви етапів виконання, а також причини з яких той чи інший типорозмір модулю приводу не може бути реалізований для умов конкретного завдання. Ці записи будуть корисними при захисті звіту про виконання роботи. Крім того, треба мати на увазі, що записи потрібно робити тільки при наявності на екрані дисплея прямих вказівок (наприклад: "Запишите в таблицу результаты выбора электродвигателя"). Після закінчення роботи над черговим варіантом результати вибору окремих модулів приводу і його параметри заносяться таблицю варіантів звіту про виконання лабораторної роботи.
Мінімальну кількість варіантів приводу встановлює викладач.
59
7.4. Послідовність роботи з програмою “Привод-6”
Етап № 1. "ВИБІР КІНЕМАТИЧНОЇ СХЕМИ ПРИВОДУ". Спочатку треба визначити максимальне значення обертального моменту, який буде діяти на валу робочого органу машини в залежності від номінального моменту Tро і
коефіцієнту перевантаження Kп (наведених в завданні на проектування):
Tроmax =TроKп. |
(7.5) |
При виборі кінематичної схеми приводу треба забезпечити виконання умови, щоб значення Tроmax не перевищувало максимальний обертальний
момент, що може передаватися редуктором привода (ці значення приведені під схемами приводів на рис. 7.3). У випадку, якщо ця умова виконується для кількох схем, перевагу варто віддати схемі № 1. Після вибору кінематичної схеми привода натискається клавіша “Enter” і на екрані з'явиться зображення прийнятої схеми приводу, яку необхідно перенести в зошит.
Рисунок 7.3 - Вибір кінематичної схеми приводу
Етап № 2. "ВИБІР ЕЛЕКТРОДВИГУНА" (чотири кроки).
2.1- "Визначення коефіцієнта корисної дії передач привода". Дозволяє вибрати відповідні значення ККД передач приводу в залежності від ступеня забруднення навколишнього середовища. Цей ступінь є в завданні і, крім того для зручності, вказується у довідковому рядку.
2.2- "Визначення необхідного значення потужності двигуна". Наочно демонст-
рує процес обчислення необхідної потужності електродвигуна у функції максимально можливого моменту.
2.3- "Вибір значення номінальної потужності двигуна". Дозволяє вибрати номінальне значення потужності з ряду стандартних значень потужностей
60
двигунів серії 4А. При цьому потрібно виконати умову, щоб номінальна потужність двигуна була більше необхідного значення, знайденого в п.2.2.
2.4 - "Вибір номінального значення частоти обертання ротора електродвигуна". Забезпечує можливість вибору номінальної частоти ротора. Для кінематичних схем приводу з одноступінчатим редуктором (передатні числа якого 2,0...6,3) рекомендується приймати тихохідні двигуни - 700..1000 об/хв, а для схем з двоступеневими редукторами (передаточні числа яких знаходяться в діапазоні 8...50) можна рекомендувати швидкохідні двигуни - 1400..3000 об/хв.
Параметри вибраного електродвигуна заносяться в таблицю варіантів розрахунку приводу. Номер варіанту вказується на моніторі в заголовку кожної відеосторінки після назви етапу.
Етап № 3. "ВИЗНАЧЕННЯ НЕОБХІДНОГО ЗНАЧЕННЯ ПЕРЕДАТОЧНОГО ВІДНОШЕННЯ ПРИВОДУ". Передатне відношення приводу визначається через кутову швидкість вала робочого органу ωро (приведена у
завданні на проектування) і кутову швидкість ротора електродвигуна ωдв:
iпр = |
ωдв |
. |
(7.6) |
|
|||
|
ωро |
|
|
В свою чергу, передатне відношення приводу забезпечується комплексом послідовно з’єднаних передач (зубчастих - i ред, пасової - iпас, або ланцюгової
iлан):
iпр = i редiпас, |
(7.7) |
або: |
|
iпр = i редiлан. |
(7.8) |
Оскільки відповідно до технічного завдання на проектування редуктор повинен бути стандартизованим, то задача реалізації передаточного відношення приводу зводиться до вибору редуктора з бібліотеки стандартизованих редукторів з наступним визначенням необхідних параметрів пасової або ланцюгової передачі.
Етап № 4. "ВИБІР СТАНДАРТНОГО РЕДУКТОРА" (два кроки).
4.1- "Вибір типу редуктора". Виконується безпосередній вибір типу редуктора за умовою, щоб номінальний обертальний момент на вихідному валу, що тривалий час може передавати редуктор, був не менше розрахункового значення обертального моменту, що діє при роботі привода.
4.2- "Вибір передаточного відношення редуктора". Кожен тип редуктора може реалізувати 6…14 різних значень передаточних відношень. Орієнтовно можна рекомендувати прийняти, щоб передатне відношення редуктора складало (20...50)% від передаточного відношення приводу (значення якого приведене в довідковому рядку). Якщо передатне відношення редуктора не входить у зазначені межі, варто прийняти найближче до цих меж значення.
Примітки. Для схем приводів за номерами 2, 3, 5 і 6 зміст і назва етапів трохи змінюються.
61
-Етап 4 називається “ВИБІР СТАНДАРТНОГО РЕДУКТОРА І МУФТИ”.
-В етапі 4.1 виконується не тільки “Вибір типу редуктора” але і "Вибір передатного відношення редуктора".
-В етапі 4.3 виконується “Вибір типа пружної пальцевої муфти”.
Параметри прийнятого редуктора та муфти заносяться в таблицю варіантів розрахунку привода.
Етап № 5. "РОЗРАХУНОК КЛИНОПАСОВОЇ (ЛАНЦЮГОВОЇ) ПЕРЕДАЧІ" (два кроки).
5.1 - "Визначення передатного відношення пасової (ланцюгової) передачі".
Передатне відношення пасової (ланцюгової) передачі визначається як відношення передатного відношення приводу до передатного відношення редуктора (див. 7.7 або 7.8). Значення передатного відношення пасової (ланцюгової) передачі повинне знаходитися в обумовлених границях, при виході за які даються рекомендації, виконання яких дозволить одержати число в потрібних межах. При виконанні рекомендації: "Залишити отримане значення" можна одержати передатне відношення пасової передачі 1 до 6, але не більш 10.
5.2 - "Вибір параметрів пасової (ланцюгової) передачі".
Пасова передача.
За значеннями необхідної потужності двигуна і кутової швидкості ротора двигуна (ведучого шківа передачі) програма визначає параметри пасової передачі для 7-ми типів пасів (О, А, Б, В, Г, Д, Е) і 4-х значеннях діаметра ведучого шківа, починаючи з мінімального. Параметри передачі представлені у вигляді дворівневого меню - для кожного типу паса даються наступні параметри: число пасів, діаметри шківів, міжосьова відстань, передатне відношення, ширина шківа.
При виборі параметрів пасової передачі варто забезпечити виконання двох умов: число пасів не повинно бути більше 8 і діаметр більшого шківа повинен бути порівняним з висотою двигуна і редуктора (ці значення даються в довідковому рядку). Міжосьова відстань визначається як мінімально припустима для клинопасових передач з наступним відповідним збільшенням, якщо число пробігів паса в секунду перевищує 10. Параметри передачі не визначаються, якщо швидкість паса перевищує припустиме значення і якщо діаметр більшого шківа перевищує 4 м. При цьому замість параметрів передачі видається відповідна інформація. Якщо відсутній рядок з числом пасів менш 9, то слід перейти до рядка: "Запрос о помощи" і виконати запропоновані рекомендації.
Ланцюгова передача.
Вибір параметрів ланцюгової передачі виконується за умовою, щоб номінальний обертальний момент на вихідному валу, що тривалий час може передавати редуктор, був не менше номінального значення обертального моменту, що може передати ланцюгова передача при швидкості ланцюга менше ніж 15 м/с.
Крім того, діаметр ведучої зірки мусить бути більшим при наймі в 1,5 рази за діаметр вихідного валу редуктора, а діаметр веденої зірки повинен бути одного порядку з висотою редуктора і двигуна.
62

Параметри пасової (ланцюгової) передачі заносяться в таблицю варіантів розрахунку привода.
Етап № 6. "ВИЗНАЧЕННЯ КУТОВОЇ ШВИДКОСТІ ВИХІДНОГО ВАЛУ ПРИВОДУ". На підставі отриманих значень передаточних чисел визначається фактичне значення швидкості вихідного валу приводу (тобто валу робочого органу). У зв'язку з застосуванням стандартизованого редуктора і стандартизованих значень діаметрів шківів пасової (ланцюгової) передачі кутова швидкість вихідного вала приводу буде відрізнятися від заданої, але це відхилення не повинне перевищувати значення, приведеного в завданні на проектування (це значення висвітлюється в довідковому рядку).
При спробі продовжити роботу програми, якщо відхилення кутової швидкості вихідного вала приводу перевищують припустиме значення, відбувається зупинка програми і даються рекомендації зменшенню цього відхилення.
Етап №7. "ЕСКІЗНЕ КОМПОНУВАННЯ ПРИВОДУ". Ескіз конструкції приводу зображується на екрані (рис. 7.4) в масштабі, обумовленому розмірами приводу і розмірами поля екрана, відведеного для зображення ескізного компонування приводу. Крім того, на екрані приводяться значення основних параметрів привода даного варіанта розрахунку. Ці параметри слід занести в таблицю варіантів розрахунку.
Етап № 8. "ЗАПОВНЕННЯ ТАБЛИЦІ ВАРІАНТІВ ПАРАМЕТРІВ ПРИВОДУ". Після команди на включення варіанта в таблицю на екрані з'явиться таблиця варіантів з основними параметрами приводу. При цьому, якщо відомий шків буде виходити за площину підошви рами приводу, буде дане відповідне попередження, а номер цього варіанта в таблиці буде позначений знаком *.
Потім варто перейти до розрахунку нового варіанта. При цьому буде запропоновані чотири можливих шляхи внесення змін у розрахований варіант:
- змінити число пасів (діаметри шківів);
Рисунок 7.4 – Ескіз конструкції приводу
63
-змінити передатне відношення редуктора;
-прийняти двигун з іншою кутовою швидкістю ротора;
-перейти до іншої кінематичної схеми приводу.
Вибір шляху внесення змін від варіанта до варіанта варто вести спрямовано, домагаючись мінімального значення параметра оптимізації, наведеного в завданні на проектування і висвітленого в довідковому рядку. Для надійного вибору оптимального варіанта варто накопичити в таблиці 3…6 варіантів.
Доцільно простежити, як кожна зі змін позначається на величині параметра оптимізації.
Етап № 9. "АНАЛІЗ ВАРІАНТІВ РОЗРАХУНКУ ПРИВОДУ". Після заповнення таблиці або вичерпання можливих шляхів внесення змін варто припинити розрахунки і перейти до аналізу таблиці варіантів розрахунку. При цьому на екрані з'явиться таблиця з накопиченими варіантами розрахунку приводу, яка представлена у формі меню, що дозволяє за допомогою курсору (контрастно виділений рядок) вибрати оптимальний варіант. Оптимальним слід вважати варіант із мінімальним значенням параметра оптимізації. У випадку, якщо мінімальне значення параметра оптимізації має місце в кількох варіантах, перевагу варто віддати варіанту з мінімальною вартістю.
Після вибору оптимального варіанта на екрані з'явиться зображення ескізного компонування привода цього варіанта і технічна характеристика приводу. Варто звірити ці дані з занесеними раніше в бланк при заповненні таблиці варіантів. При сумніві в правильності вибору оптимального варіанта можна повернутися до аналізу таблиці варіантів і вибрати інший варіант. За згодою викладача робота з програмою припиняється.
7.5.Оформити звіт про виконання лабораторної роботи №7
7.6.Питання для самоконтролю при звіті про виконання лабораторної роботи № 7
1.З яких структурних блоків складається машина і яке їх призначення?
2.Що таке привід машини і яке його призначення?
3.Які існують співвідношення між енергетичними, навантажувальними і кінематичними параметрами приводу?
4.В якій послідовності виконується вибір електродвигуна приводу машині?
5.Якими технічними параметрами характеризуються наступні модулі приводу – редуктор, клинопасова передача, ланцюгова передача?
6.Як впливає на розрахунок приводу забруднення навколишнього середовища?
7.Які обмеження мають місце при розрахунках пасової передачі?
8.Які обмеження існують при розрахунках ланцюгової передачі?
9.За якими принципами вибирається оптимальний варіант приводу машини?
10.Чим завершується робота програми “Привод-6”?
64