

4.6 Модель эллипсоида
Эллипсоид в графической базе данных задается следующими параметрами:
r – радиус эллипсоида;
h – половина высоты эллипсоида;
n – количество разбиений на вертикальной полуокружности,
m – количество разбиений на горизонтальной полуокружности.
Рассмотрим построение геометрической модели эллипсоида с помощью меридиан и параллелей, центр локальной системы координат свяжем с геометрическим центром эллипсоида, оси которой направлены произвольно. Построение геометрической модели представлено на рисунке 4.6.
z y x 0 β α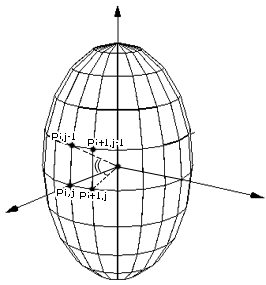
Рисунок 4.6 – Модель эллипсоида
Построение эллипсоида начинаем с построения точки с координатами Р00(0, 0, r). Затем строится нулевой меридиан (кривая разбивается на n точек) по формуле:
(4.9)
где
![]() - коэффициент растяжения;
- коэффициент растяжения;
![]() -
угол поворота.
-
угол поворота.
Построенная ломаная, точки P0,0…Pn,0 - нулевой меридиан.
Построение параллелей производится путем вращения нулевого меридиана вокруг оси Z на угол α = 2π/m.
Следовательно, в графической базе данных модель эллипсоида можно задать с помощью формулы (4.10):
Эллипсоид(r,h,n,m) (4.10)
где r – радиус эллипсоида, h – высота половыны эллипсоида, n - количество меридиан, m - количество параллелей.
4.7 Геометрическая модель косоугольного конуса
Косоугольный конус задаётся четырьмя параметрами: высота, радиус основания, смещение вершины конуса относительно центра основания вдоль оси OX, количество разбиений основания. Обозначим эти параметры соответственно буквами h, r, s и n.
Пусть центр основания совпадает с началом локальной системы координат, а часть конуса без основания находится со стороны положительного направления оси OZ. Первая точка основания имеет координаты A1=(0, r, 0). Тогда координаты остальных точек снования будем находить по следующей формуле:
Ai+1= Ai*ПоворотOZ(360/n), (4.11)
а координаты вершины конуса будут равны (s, 0, h).
Вид геометрической модели косоугольного конуса приведен на рисунке 4.6.

Рисунок 4.6 – Вид геометрической модели косоугольного конуса
4.8 Геометрическая модель пирамиды с пятиугольным основанием
Пирамида с пятиугольным основанием задаётся двумя параметрами: высота и радиус окружности, в которую вписано основание. Обозначим эти параметры соответственно буквами h и r.
Пусть центр основания совпадает с началом локальной системы координат, а часть пирамиды без основания находится со стороны положительного направления оси OZ. Первая точка основания имеет координаты A1=(0, r, 0). Тогда координаты остальных точек снования будем находить по следующей формуле:
Ai+1= Ai*ПоворотOZ(360/5), (4.12)
а координаты вершины конуса будут равны (0, 0, h).
Вид геометрической модели пирамиды с пятиугольным основанием приведен на рисунке 4.7.

Рисунок 4.7 – Вид геометрической модели пирамиды с пятиугольным основанием
4.9 Геометрическая модель усечённой пирамиды с трёугольным основанием
Данный объект задаётся тремя параметрами: высота, радиус окружности, в которую вписано нижнее основание и радиус окружности, в которую вписано верхнее основание. Обозначим эти параметры соответственно буквами h, r1 и r2.
Пусть центр нижнего основания совпадает с началом локальной системы координат, а часть пирамиды без этого основания находится со стороны положительного направления оси OZ. Первая точка нижнего основания имеет координаты A11=(0, r1, 0), а первая точка верхнего основания A21=(0, r2, h). Тогда координаты остальных точек нижнего снования будем находить по следующей формуле:
A1i+1= A1i*ПоворотOZ(360/3), (4.13)
а координаты точек верхнего основания – по формуле:
A2i+1= A2i*ПоворотOZ(360/3). (4.14)
Вид геометрической модели усеченной пирамиды с треугольным основанием приведен на рисунке 4.8.
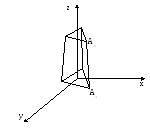
Рисунок 4.8 – Геометрическая модель усечённой пирамиды с трёугольным основанием
4.10 Моделирование икосаэдра
Для построения икосаэдра (рис. 4.9) используется цилиндр радиуса R , ось Z которого совпадает с осью цилиндра, а основание находится друг от друга на расстоянии ± h/2.

Рисунок 4.9 Построение икосаэдра
Каждое из окружностей оснований разбивается на 5 равных сегментов, и точки окружности последовательно соединяются между собой. Вращаясь против часовой стрелки на угол φ = 2*π /5, выбираются точки на первой и на второй окружности соответственно.
На высоте:
![]() выбираются вершины P'0
и P''0
и соединяются с вершинами в основании
(верхнего и нижнего соответственно).
выбираются вершины P'0
и P''0
и соединяются с вершинами в основании
(верхнего и нижнего соответственно).
Остальные вершины получаются с помощью матрицы поворота:
P’i= P’i-1*Поворот(2*π/5) (4.1)
P"i= P”i-1*Поворот(2* π /5) (4.2)
Модель построенного икосаэдра изображена на рисунке 4.10.

Рисунок 4.10 – Модель икосаэдра
4.11 Геометрическая модель додекаэдра
Построение додекаэдра осуществляется при помощи икосаэдра.
Ниже приведены краткие шаги данной операции.
Построение икосаэдра;
Определение геометрических центров каждой из граней;
Соединение геометрических центров.
Для построения
икосаэдра используется цилиндр единичного
радиуса R, ось которого совпадает с осью
OZ, и основание находится соответственно
на высоте
![]() .
Каждая из окружностей разбивается на
5 равных сегментов, и точки на окружности
последовательно соединяются между
собой.
.
Каждая из окружностей разбивается на
5 равных сегментов, и точки на окружности
последовательно соединяются между
собой.
Двигаясь против
часовой стрелки с шагом α=2π/n, выбираются
точки то на одной, то на другой окружности.
Далее происходит попарно соединение
точек. На высоте
 берется окончательная вершина.
берется окончательная вершина.
В графической базе данных додекаэдр можно представить в виде:
Додекаэдр(W), (4.15)
где w – длина стороны.
На рисунке 4.11 изображена геометрическая модель додекаэдра.

Рисунок 4.11 – Геометрическая модель додекаэдра
5 ПОШАГОВОЕ ПОСТРОЕНИЕ МОДЕЛИ СЛОЖНОГО ОБЪЕКТА
5.1 Декомпозиция сложного объекта
Моделью сложного трехмерного объекта, согласно заданию, является модель робота-краба, которая состоит из таких базовых примитивов как: эллипсоид, икосаэдр, призма с треугольным основанием, сфера, косоугольный цилиндр, усеченная пирамида с треугольным основанием, полусфера, косоугольная призма с треугольным основанием.
Модель робота-краба состоит из лап (призма с треугольным основанием, икосаэдр, усеченная пирамида с треугольным основанием), лап (косоугольный цилиндр) с клещнями (косоугольная призма с теугольным основанием), глаз (сфера), тело (полусфера, элипсоид).
5.2 Параметрические модели примитивов
Лапа состоит из следующих примитивов:
- призма с треугольным основанием Prizm3(r1, h1);
- икосаэдр Iko(r2);
- усеченная пирамида с треугольным основанием Piramid3(r3, r4, h2,).
Лапа с клещами состоит из следующих примитивов:
- косоугольный цилиндр Cyl(r5, h3, n1,m1)*M(сдвига);
- косоугольная призма с теугольным основанием KosPr(r6, h4)* *M(сдвига).
Глаз состоит из следующих примитивов:
- сфера Sphere (r7, n2, m2).
Тело состоит из следующих примитивов:
- полусфера Halfsphere(r8, n3, m3)*M(отсечения);
- элипсоид Elips(r9, n4, m4)*M(сжатия),
где r(i) – радиус, h(i) – высота, n(i), m(i) - число разбиения, М – матрица.
n1=n2=n3=n
m1=m2=m3=m
Запишем значения параметром фигур через r7:
h1=20*r7;
h2=r7;
h3=18*r7
h4=4*r7
r1=1.5*r7;
r2=r7;
r3=r7;
r4=2*r7;
r5=1.5*r7;
r6=1.5*r7;
r8=9*r7
r9=12*r7;
5.3 Пошаговое построение сложного объекта
Строим тело:
- Стоим элипосид:
Строим сферу радиусом 12*r7, умножаем на матрицу сжатия М(0.8, 1, 0.25), получаем элипсоид (рисунок 5.1).
Z Y X



Рисунок 5.1 – Эллипсоид
Строим полусферу:
- cтроим сферу радиусом 9*r7. Отсекаем пол сферу по оси –OZ.
Полученная фигура будет телом (рисунок 5.2).
Z -X Y



Рисунок 5.2- Тело
Строим глаза:
1 глаз:
- cтроим сферу радиусом r7. Переносим на (4*r7, 3*r7, 8*r7);
2 глаз:
- строим сферу радиусом r7. Переносим на (-4*r7, 3*r7, 8*r7).
Полученная фигура будет телом с глазами (рисунок 5.3)
Z -X Y



Рисунок 5.2- Тело с глазами
Строим лапы:
- строим призму с треугольным основанием:
- строим цилиндр с числом разбиения равным 3, радиуса 1.5*r7 и высотой 20*r7;
- строим икосаэдр
строим икосаэдр радиусом r7 и перемещаем на (0, 0, 20*r7);
- строим усеченную призму с треугольным основанием:
строим цилиндр с числом разбиения равным 3, радиусами r7, 2*r7 и высотой r7, поворачиваем вокруг оси OY на -90 градусов, перемещаем на (0, 0, 3*h-2/5h).
1 лапа:
- поворачиваем построенные фигуры на 90 градусов вокруг оси OX и 45 градусов вокруг оси OZ;
2 лапа:
- поворачиваем построенные фигуры на 90 градусов вокруг оси OX и -45 градусов вокруг оси OZ;
3 лапа:
- поворачиваем построенные фигуры на -90 градусов вокруг оси OX и 45 градусов вокруг оси OZ;
4 лапа:
- поворачиваем построенные фигуры на -90 градусов вокруг оси OX и -45 градусов вокруг оси OZ;
Полученная фигура будет содержать лапы (рисунок 5.3)
Z -X Y



Рисунок 5.3 - Фигура с лапами
Строим лапы с клещнями:
- строим косоугольный цилиндр:
- строим цилиндр радиусом 1.5*r7, высотой 20*r7, сдвигаем по оси OY на 0.1*r7
- строим косоугольную призму с треугольным основанием:
- строим цилиндр с числом разбиения равным 3, радиусом 1.5*r7, высотой 18*r7, сдвигаем по оси OX на 0.1*r7, перемещаем на 4*r7;
- Поворачиваем полученные фигуры на 90 градусов вокруг оси OX.
1 лапа с клещней:
- поворачиваем полученные фигуры на 30 градусов вокруг оси OY;
2 лапа с клещней:
- поворачиваем полученные фигуры на -30 градусов вокруг оси OY.
Получили робота-краба (рисунок 5.4)

Z -X Y


Рисунок 5.4 - Робот-краб