

Теорема Эйлера для плоского графа.
Для
любого связного графа G,
являющегося плоским справедливо
соотношение:p–q+f= 2, гдеpколичество вершин,qколичество ребер,fколичество граней плоского графа.
.
Пример:

p = 4
q = 4 4 – 4 + 2 = 2
f = 2
p = 4
= 4
q = 6 4 – 6 + 4 = 2
f = 4

p = 7
q = 6 7 – 6 + 1 = 2
f = 1
Критерии планарности
Критерий Понтрягина-Куратовского (критерий планарности). Граф планарен тогда, когда он не содержит подграфов гомеоморфных K5 или K3,3.
Критерий Вагнера. Граф планарен тогда, когда он не содержит подграфов, стягиваемых K5 или K3,3 (по методу операции стягивания).
Примеры: Граф Петерсена

Граф G1 – не планарен, т. к. он содержит подграф G2, гомеоморфный K3,3
Алгоритм плоской укладки графа
Алгоритм
графа G
представляет собой процесс последовательного
присоединения к некоторому уже уложенному
графу
![]() (подграф графа G)
некоторой новой цепи также принадлежащей
G
оба конца которой принадлежат
(подграф графа G)
некоторой новой цепи также принадлежащей
G
оба конца которой принадлежат
![]() .
Эта цепь разбивает одну из граней графа
.
Эта цепь разбивает одну из граней графа
![]() на две. При этом в качестве начального
плоского графа
на две. При этом в качестве начального
плоского графа
![]() выбирается любой простой цикл исходного
графа. Процесс продолжается до тех пор,
пока не будет получена плоская укладка
графа G
или присоединение некоторой цепи
оказывается невозможным, в том случае
граф является не планарным.
выбирается любой простой цикл исходного
графа. Процесс продолжается до тех пор,
пока не будет получена плоская укладка
графа G
или присоединение некоторой цепи
оказывается невозможным, в том случае
граф является не планарным.
Пусть
есть граф G
и пусть построена некоторая плоская
укладка подграфа
![]() графа G, тогда сегментом
S
относительно G
будем называть подграф исходного графа
G
одного из следующих двух видов:
графа G, тогда сегментом
S
относительно G
будем называть подграф исходного графа
G
одного из следующих двух видов:

ребра e = uv исходного графа G такие, что e плоской укладке, но вершины uv уже есть в плоской укладке.
связная компонента графа G -
 дополненной всеми ребрами графа G,
инцидентными вершинам взятой компоненты
и концевыми вершинами этих ребер.
дополненной всеми ребрами графа G,
инцидентными вершинам взятой компоненты
и концевыми вершинами этих ребер.
Г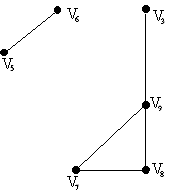 рафG
-
рафG
-
![]() (вычтем граф
(вычтем граф
![]() из исходного графа G)
из исходного графа G)
Контактная
вершина
это вершина v
сегмента S
относительно
![]() ,
если она принадлежит множеству вершин
очередной плоской укладки.
,
если она принадлежит множеству вершин
очередной плоской укладки.
Допустимой
гранью для
сегмента S
называется грань Г графа
![]() ,
которая содержит все контактные вершины
сегмента S.
,
которая содержит все контактные вершины
сегмента S.
Обозначим Г (Si) множество всех допустимых граней для сегмента Si.
Простая цепь сегмента S, содержащая 2 различные контактные вершины и не содержащая других контактных вершин, называется -цепью.
Простая -цепь проходит из контактной через неконтактные и возвращается в контактную вершину.
Алгоритм .
Выберем некоторый простой цикл C графа G и уложим его на плоскости (лучше выбирать окружение).
Найдем грани графа
 и множество сегментов S
относительно
и множество сегментов S
относительно
 .
Если множество сегментов пусто перейти
к п. 7.
.
Если множество сегментов пусто перейти
к п. 7.Для каждого сегмента S найдем множество допустимых граней Г (S).
Если существует сегмент S для которого Г (S) = (множество граней пусто), то граф G не планарен. Выход из алгоритма, иначе переход к п. 4.
Если существует сегмент S для которого ровно одна допустимая грань (|Г(S)| = 1), то перейдем к п. 6, иначе п. 5.
Для некоторого сегмента S выбираем произвольную допустимую грань Г.
Поместим произвольную -цепь L, принадлежащую S, в грань Г, заменим
 на
на
L и перейдем к п. 1.
L и перейдем к п. 1.Построена
 плоская укладка графаG.
Шагом алгоритма считается присоединение
к
плоская укладка графаG.
Шагом алгоритма считается присоединение
к
 опр. -цепи.
опр. -цепи.
Пример:


Г(S1) = Г(S2) = Г(S3) = {Г1, Г2}

S2: -цепь = {4, 5, 2} в Г2
Г(S1) = {Г1, Г2, Г3}, Г(S2) = {Г2}, Г(S3) = {Г1, Г3}

S2:-цепь = {1, 5,} в Г2
Г(S1) = {Г1, Г3}, Г(S3) = {Г1, Г3}
S1:-цепь = {2, 4,} в Г3
Г (S3)
= {Г1,
Г5}
(S3)
= {Г1,
Г5}

S3: цепь: {2, 6, 3} в Г1
Г(S) = {Г1}

S: -цепь = {4, 6} в Г1