

Режими роботи:
Новий старт/перезапуск
Блок ”CONT_C” містить вхідний параметр для запуск - COM_RST.
Інтегратор встановлюється при запуску на начальне значення записане у I_ITVAL.
Інформація про помилку
Блок не здійснює перевірки на помилку. Повідомлення про помилку RET_VAL не використовується.
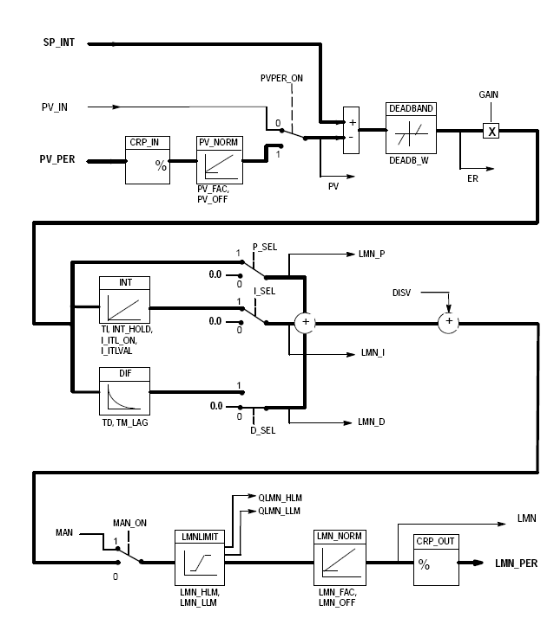
Рис. 7.2 – Структурна схема блоку CONT_C
Вхідні параметри
Таблиця 7.1 – Вхідні параметри блоку FB 41 ”CONT_C”
|
Параметр |
Тип даних |
Область величин |
Інформація |
Опис |
|
COM_RST |
BOOL |
|
FALSE |
COMPLETE RESTART / новий старт зумовить нове представлення блоку, будуть оновлені необхідні вхідні данні |
|
MAN_ON |
BOOL |
|
TRUE |
MANUAL VALUE ON / ручне керування ввімкнено, при цьому контур з регулятором буде перерваний і об’єкт буде працювати в режимі ручного курування |
|
PVPER_ON |
BOOL |
|
FALSE |
PROCESS VARIABLE PERIPHERY ON у цьому режимі необхідні данні для порівняння будуть братися з периферійних приладів |
|
P_SEL |
BOOL |
|
TRUE |
PROPORTIONAL ACTION ON / Р частина (пропорціональна частина регуляторів) увімкнена |
|
I_SEL |
BOOL |
|
TRUE |
INTEGRAL ACTION ON / I- частина (інтегральна частина регулятора) увімкнена |
|
INT_HOLD |
BOOL |
|
FALSE |
INTEGRAL ACTION HOLD / I-частина регулятора відпрацьовується з затримкою |
|
I_ITL_ON |
BOOL |
|
FALSE |
INITIALIZATION OF THE INTEGRAL ACTION / I-величину вихідного сигналу інтегратора можливо задавати |
|
D_SEL |
BOOL |
|
FALSE |
DERIVATIVE ACTION ON / D-частина пропорціонально –інтегрального регулятору активована |
|
CYCLE |
TIME |
>= 1ms |
T#1s |
SAMPLE TIME встановлення періоду дискретизації ( частота обробки сигналів) |
|
SP_INT |
REAL |
-100.0...100.0 (%) або фіз. велич 1) |
0.0 |
INTERNAL SETPOINT / внутрішнє завдання заданої величини |
|
PV_IN |
REAL |
-100.0...100.0 (%)або фіз. велич 1) |
0.0 |
PROCESS VARIABLE IN / за допомогою цього параметра можна встановлювати «дійсні величини» наприклад у момент пуску двигуна |
|
PV_PER |
WOR D |
|
W#16#00 00 |
PROCESS VARIABLE PERIPHERY / дійсні величини в момент роботи приладу будуть зніматися з периферійних приладів |
|
MAN |
REAL |
-100.0...100. 0 (%)або фіз. велич 2) |
0.0 |
MANUAL VALUE / ця функція використовується для налаштування правильної роботи наглядача |
|
GAIN |
REAL |
|
2.0 |
PROPORTIONAL GAIN /величина пропорціональної складової регулятора |
|
TI |
TIME |
>= CYCLE |
T#20s |
RESET TIME / час інтегрування |
|
TD |
TIME |
>= CYCLE |
T#10s |
DERIVATIVE TIME час диферінцювання |
|
TM_LAG |
TIME |
>= CYCLE/2 |
T#2s |
TIME LAG OF THE DERIVATIVE ACTION / час затримки D-частини в регуляторі |
|
DEADB_W |
REAL |
>= 0.0 (%)або фіз. велич 1) |
0.0 |
DEAD BAND WIDTH / встановлення зони нечутливості |
|
LMN_HLM |
REAL |
LMN_LLM ...100.0 (%)або фіз. велич 2) |
100.0 |
MANIPULATED VALUE HIGH LIMIT / встановлення верхньої межи величини |
|
LMN_LLM |
REAL |
-100.0... LMN_HLM (%)або фіз. велич 2) |
0.0 |
MANIPULATED VALUE LOW LIMIT / встановлення нижньої межи величини |
|
PV_FAC |
REAL |
|
1.0 |
PROCESS VARIABLE FACTOR / коефіцієнт підсилення |
|
PV_OFF |
REAL |
|
0.0 |
PROCESS VARIABLE OFFSET / / коефіцієнт підсилення вимкнений |
|
LMN_FAC |
REAL |
|
1.0 |
MANIPULATED VALUE FACTOR / встановлення граничних меж величин що вимірюються |
|
LMN_OFF |
REAL |
|
0.0 |
MANIPULATED VALUE OFFSET / / встановлення граничних меж вимірюванних величин. (вимкнено) |
|
I_ITLVAL |
REAL |
-100.0...100. 0 (%)або фіз. велич 2) |
0.0 |
INITIALIZATION VALUE OF THE INTEGRAL ACTION / встановлення величини інтегральної частини регулятора |
|
DISV |
REAL |
-100.0...100. 0 або фіз. велич 2) |
0.0 |
DISTURBANCE VARIABLE / встановлення збуджуючої величини |