

7.1.1 Пропорціональна складова
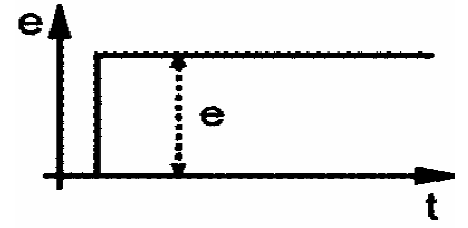
Часову характеристику пропорціональної частини можна представити через стрибкоподібний сигнал.
Вихід цього блоку у будь-якому проміжку часу пропорціональний вхідній величині. Так як вихідна величина реагує без затримки на зміну вхідної величини, пропорціональна частина діє дуже швидко на об’єкт регулювання.
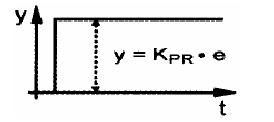
Сигнал керування у з’являється тільки тоді, коли має місце помилка e. Це видно з математичної залежності у= KPR•e.
Стрибок завдання:
Реакція на стрибок завдання:
Сигнал керування чи збудження, який викликає помилку в об’єкті регулювання, не може бути повністю скомпенсований за допомогою П - регулятора. Можлива поява статичної помилки. Статична помилка – це недолік пропорціонального регулювання. Вона може бути маленькою при великих коефіцієнтах підсилювання, та цей коефіцієнт не можна безмежно збільшувати, так як регулятор буде нестабільним.
7.1.2 Інтегральна складова
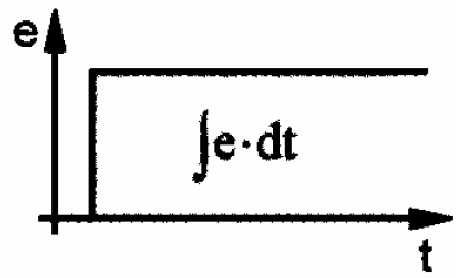
У випадку інтегральної функції регулювання вихідна величина «у» пропорціональна інтегралу вхідної величини – помилки е. Інтеграл відповідає площі, яку описує помилка е за якийсь певний проміжок часу ∆t. Інтегральний коефіцієнт KIR задає, на яку величину зміниться вихідна величина за певний проміжок часу, коли помилка змінилась на 1.
y = KIR ∫e*dt
Часову характеристику інтегральної функції регулювання можна розглянути як реакцію на стрибок завдання.
Стрибок завдання:
Реакція на стрибок завдання:
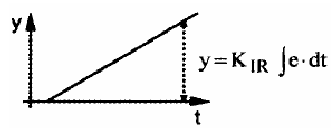
І-складова регулювання здатна звести помилку регулювання до 0 за певний проміжок часу. Реакція на керуючий чи збуджуючий сигнал проходить дещо повільніше, чим при П-регулювання.
7.1.3 Диференційна складова
Передавальний коефіцієнт Д-функції – KDR. Чим більше цей коефіцієнт, тим жорсткіше реакція на помилку. Передатний коефіцієнт KDR задає час, за який вихідна величина у буде рівнятися вхідний е, коли останній лінійно росте. Часова характеристика ПД-функції може бути представлена на прикладі стрибка завдання.
Д-частина пропорційна швидкості зміни помилки de/dt. При застосуванняі Д-частини треба бути уважним. Збуджуючі сигнали можуть бути підсилені і приводити к більшій зміні вихідної величини. При правильному застосування Д-частина оказує стабілізуючу дію.
ПІД-функція регулювання характеризується як хорошими статичними показниками (відсутність помилки регулювання) так і високими динамічними показниками. Завдяки вірному налаштуванню трьох параметрів KPR, Tn та Tv можна вирішувати завдяки ПІД-регулятору складні технологічні завдання.
7.1.4 Проектування пі-регулятора в step7 Регулювання з допомогою блока fb 41 ”cont_c”
Функціональний блок ”CONT_C” служить для регулювання технологічними процесами з аналоговими входами та виходами у системах автоматизації SIMATIC S7. Завдяки параметруванню можна включити чи відключити функціональні частини ПІД-регулятора.
Блок реалізує готовий ПІД-регулятор з аналоговими входом та виходом та можливістю впливати на завдання вручну.
Опис складових частин:
Вхід завдання
Завдання задається на вхід SP_INT у форматі реального числа.
Вхід дійсного значення
Дійсне значення може бути зчитане у форматі реального числа чи з пристроїв периферії. Функція CRP_IN перетворює значення периферії у реальне число -100 .... +100 %.
Функція PV_NORM нормує вихідний сигнал від CRP_IN
Формування помилки регулювання
Різниця завдання та дійсного значення формує помилку регулювання. Для стримування малих коливань вихідного сигналу помилку регулювання пропускають через DEADBAND. У разі DEADB_W = 0 DEADBAND відключається.
Принцип дії ПІД-регулятора
Блок діє по принципу розташування складових частин: пропорціональна, інтегральна (INT) та диференціальна (DIF) частини з’єднанні паралельно та можуть підключатися та відключатися. Завдяки цьому можуть бути побудовані P-, PI-, PD- та PID-регулятори.
Обробка у ручному режимі
Можна переключати автоматичний та ручний режими.
Обробка вихідного сигналу
Вихідний сигнал обмежується на задану величину у функції LMNLIMIT. Перевищення цього значення відображається у біті повідомлення.
Функція LMN_NORM нормує вихідний сигнал LMNLIMIT за наступними прикладами:
LMN = (Ausgang von LMNLIMIT) * LMN_FAC + LMN_OFF
LMN_FAC = 1 та LMN_OFF = 0
Підключення збуджуючої дії
На вході DISV може бути підключена компенсація збуджуючої дії.