

Lektsii_Mekhanika_Ch_1
.pdfсистема совершит перемещение vot . Координаты т. А в двух системах отсчета связаны соотношениями:
х' = х |
(133) |
||
|
|
|
(134) |
|
|
|
|
z'=z |
(135) |
||
Опыт показывает, что течение времени в обеих системах одинаково: |
|
||
t'=t |
(136) |
||
Совокупность соотношений (133, 134, 135, 136) и представляет собой преобразования Галилея в координатной форме.
Более компактную форму принимают преобразования Галилея, если положение т. А определять векторным способом:
|
|
|
|
|
|
|
(137) |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
t' = t |
(138) |
|||||||
Справедливы и преобразования Галилея для обратного перехода: |
|
|
|
||||||
|
|
х = х' |
(139) |
||||||
|
|
|
|
|
|
|
(140) |
||
|
|
z=z' |
(141) |
||||||
|
|
t=t’ |
(142) |
||||||
или |
|
|
|
||||||
|
|
|
|
|
|
|
(143) |
||
|
|
|
t = t' |
(144) |
|||||
Скорость т. А в двух системах отсчета связана соотношением: |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.3. Принцип относительности Галилея, его физический смысл.
Из закона сложения скоростей Галилея (145) следует, что ускорение тела в двух инерциальных системах отсчета, находящихся в относительном движении, одинаковы:
(146)
Механические опыты, так или иначе, связаны со 2-м законом Ньютона, т.е. с определением ускорения тела. Результат опыта (измеряемое ускорение) оказывается одинаковым во всех инерциальных системах отсчета. Это дает основание сформулировать механический принцип относительности (принцип относительности Галилея): никакими механическими опытами, проводимыми внутри инициальной системы, нельзя отличить ее от другой инерциальной системы.
При таком утверждении предполагается, что 2-й закон Ньютона имеет одинаковую форму в различных инфернальных системах, что очевидно. Закон будет иметь одинаковую форму в том случае, если отдельные физические величины, входящие в него, не преобразуются при переходе от одной инерциальной системы отсчета к другой:
F’ = F, m’ = m, a’ = a
Из закона сложения скоростей Галилея следует, что а' = а. Опыт показывает, что при небольших скоростях по сравнению со скоростью света масса тела также одинакова во всех инерциальных системах.
Что касается сил, то их основные типы зависят от времени, относительного расстояния между взаимодействующими телами и относительной скорости тел. Если эти параметры одинаковы в разных системах отсчета, то одинаковы и силы. Равенство параметров следует из преобразований Галилея и закона сложения скоростей. Поэтому механический
принцип относительности можно сформулировать и таким образом. Законы динамики ковариантны по отношению к преобразованиям Галилея.
8.Основы специальной теории относительности.
8.1.Постулаты Эйнштейна.
Воснове специальной теории относительности, прежде всего, лежит факт постоянства скорости света в различных системах отсчета, что противоречит классическому закону сложения скоростей. Кроме того, нет никаких оснований считать, что механические опыты позволят отличить одну инициальную систему отсчета от другой. Это позволило Эйнштейну сформулировать исходные постулаты специальной теории относительности. Постулат о постоянстве скорости света: скорость света в вакууме одинакова во всех инерциальных системах отсчета и не зависит от движения источника и приемника света. Постулат относительности (общефизический принцип относительности): Никакими физическими опытами нельзя отличить одну инерциальную систему отсчета от другой. Наряду с этими постулатами Эйнштейн ввел принцип синхронизации часов, имеющий такое же значение в теории относительности, как и сформулированные выше постулаты. Для того, чтобы одинаковые по устройству часы А и В (рис.31)
шли одинаково, необходимо их синхронизировать. Пусть в момент времени  ,
,
отсчитанный по часам А, в том месте, где они находятся, осуществляется световая вспышка. Сигнал от нее достигает часов В, мгновенно отражается и поступает к часам А в момент времени 
 , отсчитанный по ним. Часы А и В считаются
, отсчитанный по ним. Часы А и В считаются
синхронизированными, если в момент отражения сигнала в т. В показания часов равны:
tB = (t1 + t2 )/ 2
По сути дела в принципе синхронизации постулируется утверждение, что прямой и отраженный сигналы движутся с одинаковой скоростью, а само отражение происходит мгновенно, что не следует из сформулированных ранее постулатов.
Исходя из указанных постулатов, можно получить все основные выводы специальной теории относительности.
8.2. "Радиолокационный" метод (метод коэффициента "k ").
Движение тел можно графически представлять диаграммами x=x(t). В случае скоростей, сравнимых со скоростью света, масштаб х и t выбирается таким, что траектория светового сигнала ("световая линия") делит координатный угол пополам. Если же тело движется со скоростью, меньшей скорости света, угол наклона его траектории к оси t меньше 45°.
Предположим, что две инерциальные системы отсчета А и В находятся в относительном движении. Систему А условно считаем неподвижной. В исходный момент времени системы полностью совпадали. В этот момент осуществляется синхронизация подвижных и неподвижных часов и на них устанавливаются нулевые показания. Далее система В удаляется от А со скоростью v<c (рис.32).
Рис.32
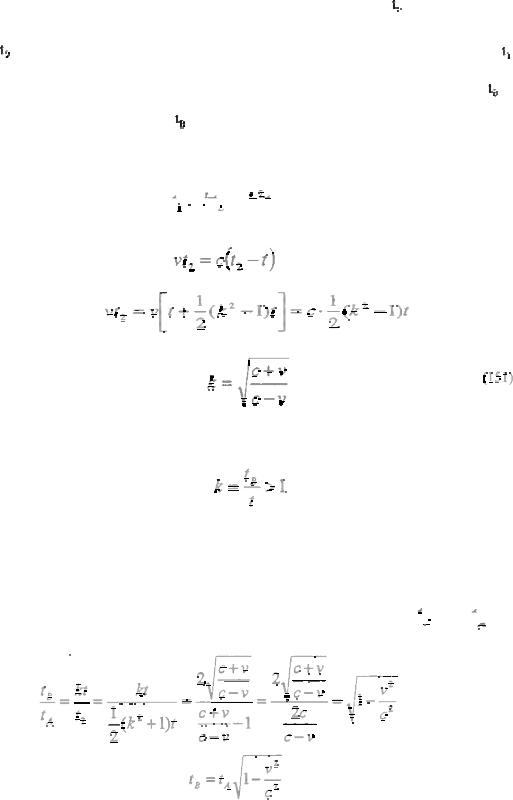
Затем в системе А производится вторая вспышка в момент времени t, измеренный по часам А. Сигнал от нее догоняет систему В в момент времени 
 , измеренный по часам В в подвижной системе, а показания неподвижных часов А для этого события
, измеренный по часам В в подвижной системе, а показания неподвижных часов А для этого события
равны . Сигнал мгновенно отражается и приходит в систему А в момент времени |
, |
|
отсчитанный по часам А. |
|
|
Предположим, что показания подвижных часов в момент отражения сигнала |
в k |
|
раз отличаются от показаний неподвижных часов t в момент посылки сигнала: |
|
|
= kt |
(148) |
|
Системы равноправны, поэтому с момента отражения неподвижной можно считать систему В, а систему А - подвижной. Тогда показания часов А в момент приема сигнала равны:













 (150) С момента синхронизации до отражения сигнала система В и световой сигнал,
(150) С момента синхронизации до отражения сигнала система В и световой сигнал,
посланный в момент времени t (по часам А), проходят одинаковый путь:
т.е.
откуда получаем значение коэффициента k:
Следовательно, показания подвижных часов в момент приема сигнала всегда больше показаний неподвижных часов в момент посылки сигнала:
8.3. "Замедление" хода времени.
Рассмотрим на описанном выше примере промежуток времени между двумя событиями (синхронизация часов и отражение сигнала), измеренный по часам А и В. Поскольку в момент синхронизации показания обоих часов нулевые, то промежуток времени численно равен показаниям часов в момент отражения сигнала. Обозначив промежуток времени, измеренный по часам А и В, соответственно 
 и
и 
 , отношение этих показаний запишем в виде:
, отношение этих показаний запишем в виде:
откуда:
(152)
Следовательно, промежуток времени между двумя событиями, измеренный подвижными часами, меньше результата того же измерения по неподвижным часам.
8.4. Относительная скорость.
Предположим, что системы А, В и D находятся в относительном движении. В исходный момент все три системы совпадали. В этот момент производим синхронизацию всех часов и устанавливаем на них нулевые показания. Далее система В удаляется от А со скоростью v1, а система D - со скоростью ν2 >v1. В момент времени t (пo часам А) в
системе А производится световая вспышка, сигнал от которой достигает (рис.33)
Рис.33
системы В в момент tB =k1t (по часам В) и системы D в момент tD =k2t (по часам D). При этом:
Теперь будем считать систему В неподвижной, а систему D - удаляющейся от B с относительной скоростью и. Тогда:
(154)
где:
Следовательно:
откуда:
Это и есть выражение для относительной скорости.
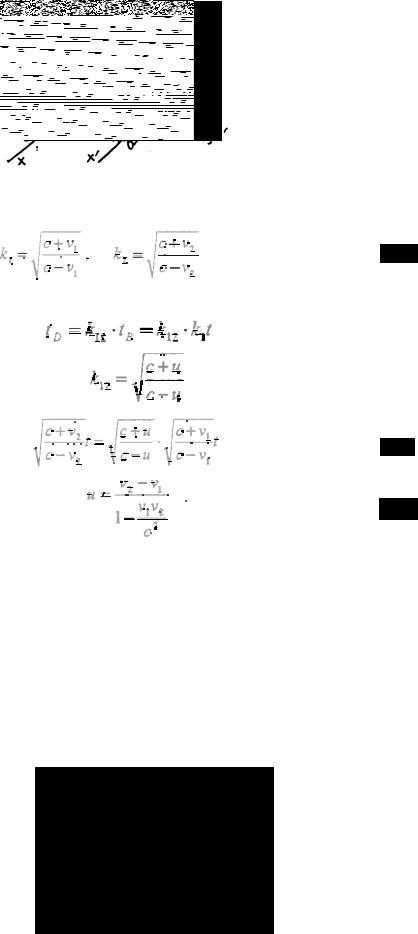
8.5. Сравнение поперечных размеров тел.
Пусть две системы OXYZ и O'X'Y'Z' находятся в относительном движении. Одну из них, OXYZ, считаем неподвижной, другая же движется со скоростью v относительно первой так, что оси ОХ, 0'Х' и 0Z, О’Z' остаются параллельными, а ось О’Y' скользит вдоль оси OY . В подвижной системе вдоль оси O'Z' расположены "световые часы" (жесткий стержень с двумя зеркалами на концах, отражающими поверхностями друг к другу) так, что нижнее зеркало совпадает с началом системы отсчета (рис.34). В исходный момент, когда системы полностью совпадали, у нижнего зеркала произошла световая вспышка. Сигнал от нее достигает верхнего зеркала, отражается, приходит опять к нижнему зеркалу, и далее процесс повторяется периодически. Пусть по неподвижным часам промежуток
Рис.34
времени между вспышкой и приходом сигнала равен t. За это время в неподвижной системе световой сигнал проходит путь сt, а подвижная система - vt. Из рисунка видно, что длина световых часов, численно равная координате z верхнего зеркала, в неподвижной системе равна:
(157)
В подвижной системе, связанной с подвижными часами, длина их равна:
z'=ct' |
(158) |
где: t' - полупериод часов, т.е. промежуток времени между вспышкой и приходом сигнала к верхнему зеркалу.
Учитывая эффект "замедления" хода времени, получаем:
т.е. поперечные размеры (по отношению к направлению движения) тел одинаковы в обеих системах отсчета:
z'=z
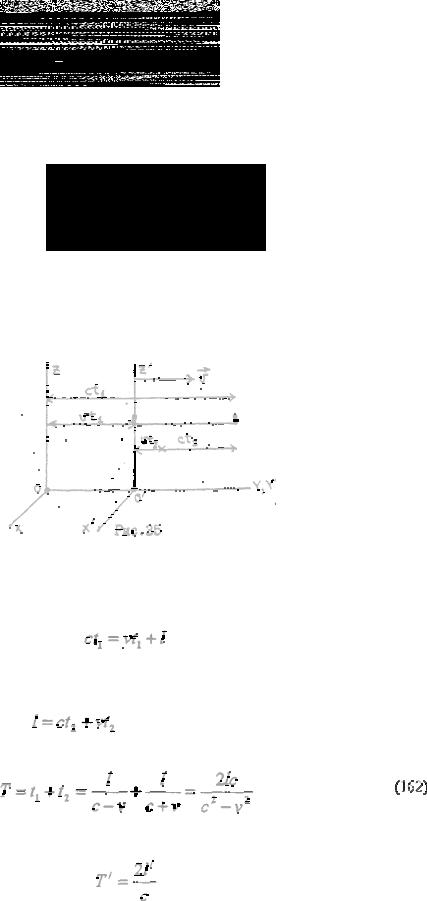
8.6. Эффект "сокращения" длин.
Пусть теперь световые часы ориентированы вдоль оси подвижной системы так, что левое зеркало совпадает с ее началом. В исходный момент системы совпадали, и в этот момент у левого зеркала произошла вспышка. Сигнал от нее достигает правого зеркала через промежуток
времени t1 по неподвижным часам (рис.35). Тогда:
где: l - длина световых часов, измеренная в неподвижной системе.
После отражения сигнал и левое зеркало движутся навстречу друг другу и встречаются в момент времени t2 по неподвижным часам. Очевидно, что:
(161)
Период световых часов, измеренный в неподвижной системе, равен:
В подвижной системе период часов определяется соотношением:
(163)
где l' - длина часов, измеренная в подвижной системе. Отсюда:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(164) |
т.е.: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следовательно, продольные размеры тел в любой системе меньше собственных l′ :
8.7. Преобразования Лоренца.
Преобразования Лоренца дают связь между пространственными и временными координатами событий в двух инициальных системах отсчета, находящихся в
относительном движении. |
|
||||||
Учитывая, что поперечные размеры тел одинаковы, получаем: |
|
||||||
z'=z |
(166) |
||||||
х'=x |
(167) |
||||||
Для сравнения координат у обратимся к предыдущему примеру: |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С другой стороны, это соотношение можно представить в виде:
т.е.
Соотношения (166,167,168,170) называют преобразованиями Лоренца.
8.8. Интервал. Инвариантность интервала.
Интервалом S между двумя событиями называют величину, квадрат которой равен:
где xi,yi,zi,ti - пространственные и временные координаты событий.
Используя преобразования Лоренца, запишем интервал в подвижной системе отсчета:
Таким образом, интервал является инвариантом: |
|
S /2=S 2 |
(171) |
В зависимости от соотношения между временной cΔt и пространственной -
l = ( x)2 + ( y)2 + ( z)2
частями интервала различают: 1.Времениподобные интервалы (cΔt > Δl). 2.Пространственноподобные интервалы (cΔt <s Δl). 3. Светоподобные интервалы (сΔt = Δl).
8.9. Преобразования компонентов вектора скорости.
Преобразования компонентов вектора скорости можно получить, пользуясь преобразованиями Лоренца:
8.10. Релятивистская масса, релятивистский импульс.
Из факта предельности скорости света следует, что тела могут двигаться только со скоростями, меньшими скорости света. Если на тело действует постоянная сила, то его ускорение пропорционально силе лишь при малых скоростях. С ростом скорости при неизменной силе ускорение начинает уменьшаться, что можно объяснить только возрастанием массы тела с ростом скорости.
Масса тела, движущегося со скоростью ν , равна:






 ,
,
где m0 - масса тела в системе, связанной с ним, так называемая "масса покоя". Соответственно, импульс тела определяется выражением:
(176)
8.11. Релятивистское уравнение движения.
Релятивистское уравнение движения по внешнему виду совпадает с записью основного закона динамики Ньютона в общей формулировке:
Релятивистское уравнение динамики удовлетворяет преобразованиям Лоренца и, следовательно, общефизическому принципу относительности. Важно отметить, что в отличие от классического закона динамики в релятивистском случае сила и ускорение могут не совпадать по направлению:
Лишь в двух случаях, когда сила нормальна к вектору скорости или сонаправлена с ним, ускорение и сила по направление совпадают.
9.Неинерциальные системы отсчёта.
9.1.Силы инерции.
Как уже отмечалось, существуют такие системы отсчета, в которых ускорение тел вызывается не только действием сил, но и самим движением системы отсчета.
Рассмотрим поведение свободного тела, находящегося в покое относительно неподвижной системы. В этой системе выполняются законы Ньютона: равнодействующая приложенных к телу сил равна нулю и тело, как следствие, находится в покое. Если же другая система отсчета движется относительно первой с ускорением a, то в подвижной системе тело получает ускорение - а, равное по величине ускорению системы и противоположно ему направленное. Следовательно, в подвижной системе законы Ньютона не выполняются: равнодействующая приложенных сил равна нулю, а тело приобретает ускорение.
Чтобы и в таких системах выполнялись законы Ньютона, приходится вводить дополнительные фиктивные силы, называемые силами инерции. В рассмотренном примере в подвижной системе вводится сила инерции:
объясняющая появление ускорения тепа в подвижной системе отсчета. Т.е. сила инерции равна произведению массы тела на ускорение системы и противоположно ему направлена. Если связать систему отсчета с ускоренно движущимся телом, то геометрическая сумма всех сил, приложенных к телу, включая силу инерции, равна нулю (принцип Даламбера).
9.2. Силы инерции во вращающихся системах отсчета.
Во вращающихся системах отсчета возникающие силы инерции зависят не только от движения системы, но и от характера движения тела относительно нее. Положим, что тело покоится во вращающейся системе и вращается вместе с ней. Для неподвижного наблюдателя тело движется по окружности, следовательно, на него действует реальная центростремительная сила. Во вращающейся системе тело покоится, хотя на него и действует указанная сила. Для выполнения законов динамики приходится ввести фиктивную силу, уравновешивающую центростремительную.

Такую силу называют центробежной силой инерции.
При движении тела относительно вращающейся системы приходится вводить дополнительные силы инерции.
9.3. Силы инерции Кориолиса.
Пусть система вращается равномерно с угловой скоростью ω. Вдоль радиуса системы равномерно со скоростью v движется тело (рис. 36).
Абсолютный импульс тела определяется относительным и переносным движением
Со временем будут изменяться обе составляющие абсолютного импульса. Рассмотрим сначала изменение относительного импульса.
Поскольку тело движется равномерно относительно подвижной системы, будет изменяться только направление импульса. За промежуток времени система (и ее радиус) поворачивается на угол Δϕ = ωΔt (рис. 37).
При малых углах поворота вращение относительного импульса равно:
(179)
Направлено это изменение в сторону вращения перпендикулярно к радиусу. Переносный импульс направлен все время в сторону вращения перпендикулярно к радиусу, величина его, пропорциональная линейной скорости вращения системы, зависит от удаления от центра вращения (рис.38)
Изменение величины переносного импульса за время dt равно
(180)
Как видно, изменения относительного и переносного импульсов одинаковы по величине и направлению, поэтому полное изменение импульса тела равно
(181)
С другой стороны, из основного закона динамики следует:
 , где F - равнодействующая приложенных к телу сил.
, где F - равнодействующая приложенных к телу сил.
Таким образом, наблюдаемые изменения импульса вызываются внешними силами, равными по величине:
|
F=2mνω |
(182) |
|
Учитывая направления (рис. 39) векторов |
|
в векторном виде можно записать |
|
|
|
||
(183)
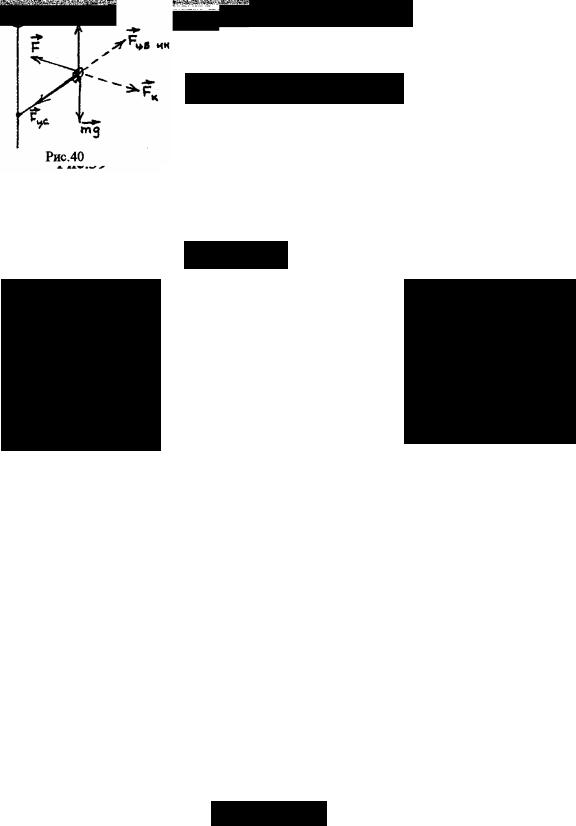
Для рассмотренного случая движения на рис.40 представим все действующие на тело силы. Пусть стержень вращается равномерно в горизонтальной плоскости, вдоль него равномерно движется небольшая муфточка. Относительно неподвижного наблюдателя на тело должны действовать следующие силы (отмеченные на рисунке сплошными линиями).
Т.к. тело движется в горизонтальной плоскости, сила тяжести P уравновешена реакцией
стержня N . Поскольку траектория тела |
криволинейная, на него должна действовать |
|||
центростремительная сила |
|
, обеспечивающая нормальное ускорение. Наконец, на |
||
тело действует рассмотренная |
|
|
|
, приложенная со стороны стержня. |
выше сила |
|
|||
В системе, связанной с вращающимся стержнем, тело движется равномерно и прямолинейно, т.е. сумма приложенных к нему сил должна быть равной нулю. Как видно из рисунка, в горизонтальной плоскости силы не уравновешены, поэтому необходимо для выполнения законов динамики ввести силы инерции (на рисунке показаны пунктиром). Вдоль стержня действует центробежная сила инерции, уравновешивающая центростремительную силу.
Силу  уравновешивает сила инерции Кориолиса
уравновешивает сила инерции Кориолиса  :
:
(184)
Как видно из (184), сила Кориолиса возникает во вращающейся системе отсчета при относительном движении тел. Исключением является движение тела вдоль оси вращения системы - силы инерции Кориолиса в этом случае не возникают.