

Тема 7. Анимация
Mathcad предусматривает возможность анимации графиков и результатов вычислений путем создания AVI-файлов и вставки их в документ Mathcad. Воспроизводятся созданные AVI-файлы встроенными в Windows средствами.
Создание анимации
t Mathcad имеет встроенную переменную FRAME, предназначенную только для создания анимационных клипов. FRAME принимает целочисленные значения от 0 до n и должна быть включена в расчетные выражения так, чтобы с изменением FRAME изменялся вид соответствующего графика. Фактически, значением FRAME является номер кадра. Значение переменной FRAME обычно задается не в документе Mathcad,
а в диалоговом окне, открывающемся командой Инструменты ► Анимация► Запись.
0.Перед созданием анимационного клипа убедитесь, что в меню Инструменты (Вычисления) включен режим автоматических вычислений.
Рассмотрим процесс создания анимации.
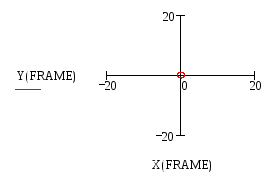
Введите переменную Т в математическое выражение, определяющее вид графика-для проверки правильности формулы. Построить график от переменной Frame.
Выберите команду Инструменты ► Анимация► Запись.
После открытия диалогового окна анимации курсором выделите нужный фрагмент изображения.
4. В диалоговом окне задайте общее число кадров и частоту их воспроизведения. Установленное по умолчанию число 10 — слишком большая скорость воспроизведения кадров. Лучше установить 2-3 кадра в секунду, иначе «кино» продлится всего 1 секунду.
Полученный ролик можно сохранить как AVI-файл и просматривать отдельно от МКАД. При нажатии кнопки Параметры раскрывается список выбора программы сжатия файл.
5. Щелкните на кнопке Анимация и наблюдайте за созданием кадров. После завершения этого процесса появится окно проигрывателя видеофайлов.
!При создании клипов рекомендуется отключить автомасштабирование графика. Числовые значения пределов изменения осей следует ввести вручную.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Тема 8. Преобразования матриц. Построение трехмерных графиков
|
1.Построить пересекающиеся фигуры F1(x,y):=sin(x2+y2) M1=CreateMesh(f,-1.5,1.5,-1.5,1.5,20,40) F2(x,y):=x2+y2-5 M2=CreateMesh(f,-1.5,1.5,-1.5,1.5,20,40) |
|
|
2. Создать поверхность из функции двух переменных
|
3. Построить трехмерную кривую
|
|
|
|
|
4. Построение цилиндра
fi:=0+i2/n
|
или график FT – тот же вид |




Построить все трехмерные графики по лекции.
Записать в массив координаты окружности, построить график. Используя матрицу поворота, превратить окружность в эллипс. Добавить график эллипса к графику окружности. Параллельно перенести обе фигуры.
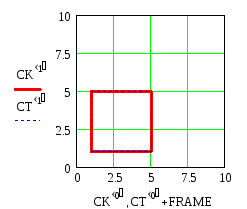
Построить график квадрата, предварительно сохранив его координаты в массиве.
Используя матрицу поворота, превратить квадрат в ромб. Добавить график ромба к графику квадрата. Параллельно перенести обе фигуры.
Алгоритм выполнения задания 2
Задать n– количество точек рассчитываемых узлов фигуры.
Ввести дискретную переменную
![]() .
.
Задать вектор изменения угла
![]() - изменяется в пределах от -до +, т.е. 2.
- изменяется в пределах от -до +, т.е. 2.
Задать векторы изменения координат
![]()
![]()
Задать промежуточные векторы![]()
![]() ,
из которых составить матрицу С.
,
из которых составить матрицу С.
Задать матрицу поворота и искажения
![]() ,
причем численные значения можно
варьировать для получения разных форм
эллипса.
,
причем численные значения можно
варьировать для получения разных форм
эллипса.
Умножить матрицы
![]() и построить в одной координатной системе
окружность и эллипс.
и построить в одной координатной системе
окружность и эллипс.
Алгоритм выполнения задания 3
Задать n– количество точек рассчитываемых узлов фигуры,a- длина ребра,xn,yn– координаты левой нижней вершины .
Ввести дискретную переменную
![]() .
.
Задать векторы изменения координат xиyдля левого вертикального ребра, из которых составить матрицу С1. Матрицу С3 (правая вертикаль) получить из С1 – параллельным переносом. Задать векторы изменения координатxиyдля горизонтального нижнего ребра, из которых составить матрицу С4. Матрицу С2 (верхняя горизонталь) получить из С4.
Объединить все матрицы С в одну К – квадрат, построить график. Задать матрицу поворота и искажения. Повернуть на 45 градусов и сохранить в матрицу R, построить график.
Преобразования матриц
Матрица параллельного переноса теперь определяется как [ 1 0 0 dx ] [ 0 1 0 dy ] [ 0 0 1 dz ] [ 0 0 0 1 ] Матрицу масштабирования можно определить и для матриц 3x3, и для матриц 4x4: [ kx 0 0 ] [ kx 0 0 0 ] [ 0 ky 0 ] или [ 0 ky 0 0 ] [ 0 0 kz ] [ 0 0 kz 0 ] [ 0 0 0 1 ] где kx, ky, kz - коэффициенты масштабирования по соответствующим осям.
Вспомним о матрицах и векторахУдобство матриц для нас заключается как раз в свойстве A*(B*C) = (A*B)*C.Пусть мы делаем несколько поворотов подряд, например, пять (как раз столько, сколько надо для поворота относительно произвольной оси), и пусть они задаюся матрицами A, B, C, D, E (A - матрица самого первого поворота, E - последнего). Тогда для вектора p мы получаем p' = E*(D*(C*(B*(A*p)))) = E*D*C*B*A*p = (E*D*C*B*A)*p = = (E*(D*(C*(B*A))))*p = T*p, где T = (E*(D*(C*(B*A)))) матрица преобразования,являющегося комбинацией пяти поворотов.
Посчитав один раз эту матрицу, можно в дальнейшем без проблем применить довольно сложное преобразование из пяти поворотов к любому вектору с помощью всего одного умножения матрицы на вектор.
Таким образом, можно задать любой поворот матрицей, и любая комбинация поворотов также будет задаваться матрицей, которую можно довольно легко посчитать. Но есть еще параллельный перенос, есть еще масштабирование. Что делать с ними?
На самом деле, эти преобразования тожелегкозаписываются в виде матриц. Только вместо матриц 3x3 и 3-мерных векторовиспользуютсятак называемыеоднородные 4-мерные координаты и матрицы 4x4. При этом вместо векторов вида [ x ] [ y ] [ z ] используются вектора вида [ x ] [ y ] [ z ] [ 1 ] а вместо произвольных матриц 3x3 используются матрицы 4x4 такого вида: [ a b c d ] [ e f g h ] [ i j k l ] [ 0 0 0 1 ] Видно, что если d = h = l = 0, то в результате применения всех операций получается то же самое, что и для матриц 3x3.
и внимательно посмотрим на выведенные формулы для поворота. Можно заметить, что
[ x' ] = [ cos(alpha) -sin(alpha) 0 0] [ x ] [ y' ] = [ sin(alpha) cos(alpha) 0 0] [ y ]
[ z' ] = [ 0 0 1 0] [ z ]
[ 1 ] = [ 0 0 0 1] [ 1 ]
То есть поворот на угол alpha задается одной и той же матрицей, и с помощью этой матрицы (умножая ее на вектор-точку) можно получить координаты повернутой точки.
Матрица параллельного переноса теперь определяется как [ 1 0 0 dx ] [ 0 1 0 dy ] [ 0 0 1 dz ] [ 0 0 0 1 ] Матрицу масштабирования можно определить и для матриц 3x3, и для матриц 4x4: [ kx 0 0 ] [ kx 0 0 0 ] [ 0 ky 0 ] или [ 0 ky 0 0 ] [ 0 0 kz ] [ 0 0 kz 0 ] где kx, ky, kz - коэффициенты масштабирования по [ 0 0 0 1 ] соответствующим осям. Таким образом, получаем следующее.Любое нужное нам преобразование пространства можно задать матрицей 4x4 определенной структуры, разной для разных преобразований.Результатпоследовательного выполнений нескольких преобразований совпадает с результатом одного преобразования T, которое также задается матрицей 4x4, вычисляемой как произведение матриц всех этих преобразований.Важен порядок умножения, так как A*B != B*A. Результат применения преобразования T к вектору [x y z] считается как результат умножения матрицы T на вектор [x y z 1]. Вот и все.
Инженерная задача
Станок в процессе работы испытывает деформации. Станок можно разбить на взаимосвязанные подсистемы. Деформации передаются от одной к другой подсистеме, от резца к заготовке. Поэтому вместо идеального цилиндра после обработки получают сложную искривленную в пространстве фигуру. Деформации каждой подсистемы можно описать. Поэтому можно рассчитать отклонение получаемой после обработки детали от идеальной фигуры. Кроме того, в МКАД можно и наглядно показать получаемую фигуру.
Представим станок в виде основных подсистем
|
Подсистема |
Деформации |
|
резец |
поворот вокруг Z |
|
державка резца |
перемещение по X, поY, поворот вокругZ, поворот вокругX |
|
суппорт |
перемещение по X, перемещение поX, поY |
|
винт суппорта |
перемещение по X |
|
передняя бабка |
поворот вокруг Z |
|
шпиндель |
поворот вокруг Z, поворот вокругY, перемещение поX |
|
патрон |
перемещение по X, поворот вокругZ, поворот вокругY |
|
заготовка |
поворот вокруг Z |
Каждую деформацию задают в виде матрицы.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Зададим матрицу смещения

- матрица со смещением
![]()
Зададим матрицы поворота
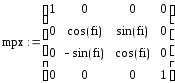
![]()
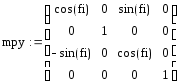
![]()
![]()