

Самостоятельно: Построить графики. Найти координаты пересечения двух фигур, если дано:
|
№ варианта |
a |
b |
R |
r |
c |
d |
|
dx |
dy |
|
1 |
20 |
40 |
|
10 |
|
|
|
20 |
30 |
|
2 |
|
|
|
15 |
|
40 |
60 |
30 |
5 |
|
3 |
|
|
75 |
25 |
|
|
|
60 |
20 |
|
4 |
25 |
38 |
|
|
|
38 |
45 |
30 |
20 |
|
5 |
25 |
50 |
|
15 |
|
|
|
33 |
-17 |
|
6 |
15 |
25 |
|
|
|
40 |
60 |
23 |
-17 |
|
7 |
15 |
25 |
|
|
|
40 |
60 |
10 |
39 |
|
8 |
|
|
|
|
|
40;20 |
60 |
5 |
35 |
|
9 |
25;10 |
38;20 |
|
|
|
|
|
20 |
40 |
|
10 |
25;10 |
38;20 |
|
|
|
|
|
10 |
32 |
|
11 |
|
|
40 |
|
55 |
|
|
45 |
40 |
|
12 |
|
|
40 |
|
60 |
|
|
20 |
10 |
|
13 |
25 |
38 |
|
|
40 |
|
|
30 |
-10 |
|
14 |
|
|
30 |
|
|
40 |
45 |
32 |
32 |
|
15 |
25 |
38 |
|
18 |
|
|
|
27 |
15 |
Обозначения:
а – малая полуось эллипса;
b – большая полуось эллипса;
R – радиус большой окружности;
r – радиус малой окружности;
c –сторона квадрата;
d –сторона ромба;
- угол при острой вершине ромба.
1

2
 3
3

4

5

6
7

8
9
10

11

12

13

13

14

15
Тема 6. Задания на решение систем уравнений
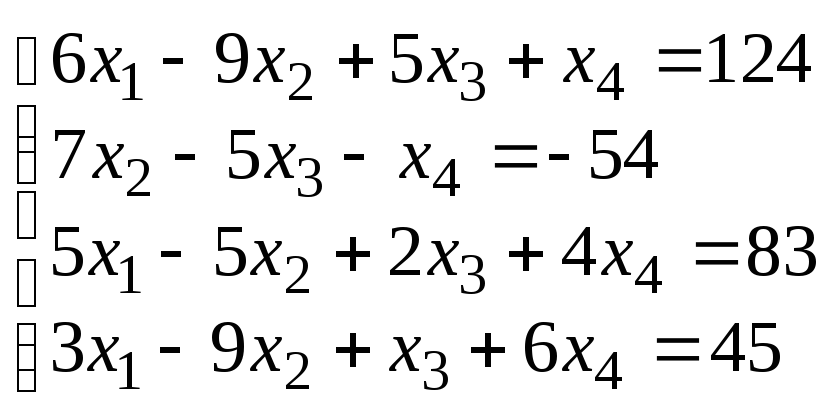
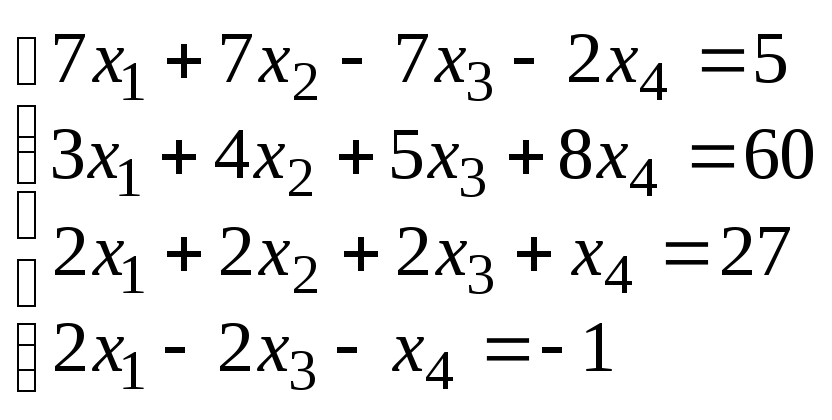
1. Решить систему линейных уравнений (Таблица1):
используя функцию Find;
используя функцию lsolve.
Функция lsolve(M, v) : Возвращается вектор решенияzтакой, чтоM z = v.
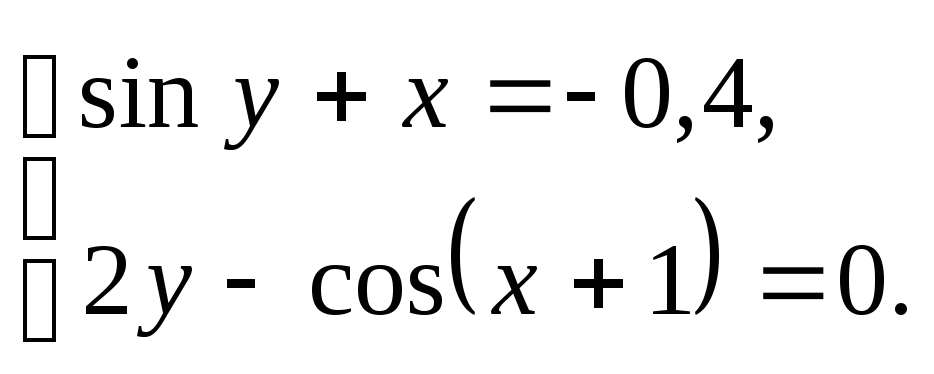
2. Преобразовать нелинейные уравнения системы из Таблицы 2 к видуf 1(x) = yиf 2 (y)= x. Построить их графики и определить начальное приближение решения. Решить систему нелинейных уравнений с помощью функцииMinerr.
Таблица 2
|
№ вари-анта |
Система нелинейных уравнений |
№ вари-анта |
Система нелинейных уравнений |
|
|
|
|
|

3.Найти корни полинома
![]()
Любое уравнение Р(х)=0, где Р(х) – многочлен, отличный от нулевого, называется полиномомотносительно переменной х.
Для нахождения корней выражения, имеющего вид
![]() ,
,
лучше использовать функцию polyroots, нежелиroot. В отличие от функцииroot, функцияpolyroots не требует начального приближения и возвращает сразу все корни, как вещественные, так и комплексные.
polyroots(v) - Возвращает корни полинома степениn. Коэффициенты полинома находятся в вектореvдлиныn + 1. Возвращает вектор длины n, состоящий из корней полинома.