

Ip54 – степень защиты.
38.Работа асинхронной машины при вращающемся роторе.
|
|
Режим двигателя.
Рассмотрим два крайних режима двигателя:
а) холостой ход двигателя
При холостом ходе нет нагрузки на валу, ротор под действием вращающего магнитного поля статора разгонится до скорости близкой к синхронной, а ток статора равен току холостого хода. Мощность, потребляемая из сети пойдет на покрытие потерь, т.е.
Ро = Рэл1 + Рмг + Рмех + Рдоб
Разница между тр-м и двигателем будет только конструктивная. В двигателе имеется воздушный зазор. Поэтому ток холостого хода двигателя равен 20 ¸ 30% от номинального.
б) режим короткого замыкания
При этом режиме ротор механически заторможен, а обмотка ротора закорочена. К статору подводится пониженное напряжение, при котором ток имеет значение близкое к номинальному. Мощность короткого замыкания пойдет на покрытие потерь в стали и обмотках. При номинальном напряжении пусковой ток
Iп = (5 ¸ 7)Iн.
Используя данные режима холостого хода и короткого замыкания можно построить круговую диаграмму, а по ней определить рабочие характеристики двигателя при нагрузке.
При рассмотрении этого вопроса мы увидим, что частота ротора, ЭДС и индуктивное сопротивление с изменением скорости вращения ротора не остаются постоянными. Запишем выражение ЭДС неподвижного ротора:
![]()
для вращающего ротора
![]()
где f2 – частота ЭДС ротора

![]()
тогда

![]()
т.е. ЭДС ротора при вращении равна ЭДС неподвижного ротора на скольжение и частота ротора равна частоте неподвижного ротора (f1) на скольжение.
Рабочий процесс асинхронного двигателя.
 3-3-1.
Режимы работы асинхронной машины.
3-3-1.
Режимы работы асинхронной машины.
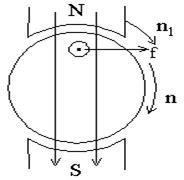
Пусть в начале ротор не вращается. Магнитное поле, пересекая проводники ротора индуктируют в них ЭДС. При замкнутой цепи ротора по обмотке его потечет ток.
Взаимодействие потока статора и тока ротора вызовет усилие, действующее на проводник, под действием которого ротор начнет вращаться. Вращение будет в ту же сторону, что и магнитный поток.
Скорость ротора будет меньше скорости вращения магнитного поля статора, рис. 105.
Скольжение
 .
.
Разберемся, в каких пределах будет изменяться скольжение.
Момент зависит от потока Ф и тока I2 при U = const, поток также постоянен. Если увеличивается момент на валу, то увеличивается и момент двигателя за счет увеличения тока I2, а I2 Е2 S, S увеличивается за счет увеличения интенсивного пересечения проводников ротора.
 ,
при двигательном режиме скольжение S
изменяется от 1 до 0.
,
при двигательном режиме скольжение S
изменяется от 1 до 0.
При неподвижном роторе n = 0, S = 1
Если ротор будет вращаться с n = n1, S = 0
Это диапазон скольжений соответствует двигательному режиму. Мощность потребляемая из сети будет преобразована в механическую на валу, рис. 106.
2. Но если под действием спускаемого груза раскрутить ротор до скорости больше синхронной, то машина перейдет в генераторный режим
n > n1, S < 0 - скольжение отрицательное, рис. 106.
При этом режиме механическая мощность будет преобразована в электрическую, которая будет отдаваться в сеть Р1, а реактивная будет потребляться для создания магнитного потока Ф.