

20.Торможение двигателей постоянного тока.
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным в озбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов.
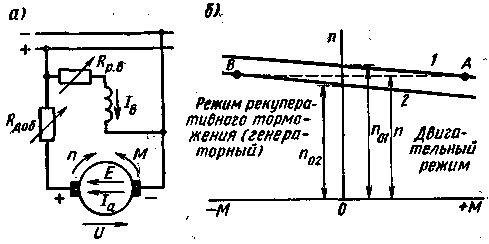
Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря.
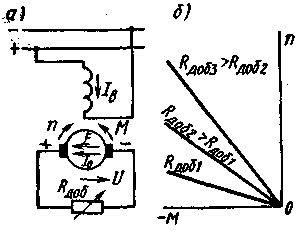
Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
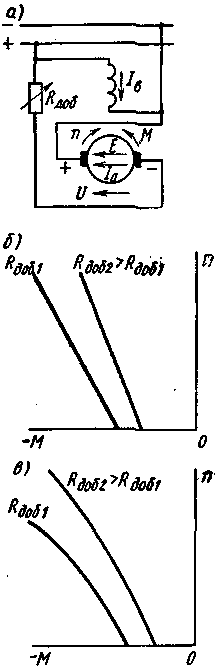 Рис.8.76.
схема и механические характеристики
двигателей в режиме электромагнитного
торможения.
Рис.8.76.
схема и механические характеристики
двигателей в режиме электромагнитного
торможения.
21.Универсальные коллекторные двигатели - это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.
Современные серии машин постоянного тока.
Первая общесоюзная серия машин постоянного тока была создана в 1956 г. Она была названа серией П. В этой серии впервые была установлена нормализованная шкала номинальных мощностей и номинальных частот вращения машин. Машины серии П состояли из трех групп конструктивно подобных отрезков серии: машины мощностью от 0,3 до 200 кВт (1—11-й габариты), машины мощностью 200—1400 кВт (12—17-й габариты) и машин мощностью свыше 1400 кВт (18—26-й габариты).
Габарит машины определяется диаметром якоря, который нормализован. Для каждого габарита устанавливают две длины сердечника. Исполнение двигателей единой серии П от 1-го до 11-го габарита по степени защиты соответствует IP22, по способу охлаждения - IC01 или IC05. Возбуждение смешанное. Серия 2П, созданная к 1974 г., приблизительно через 20 лет после создания первой серии П, спроектирована в полном соответствии с рекомендациями Международной электротехнической комиссии (МЭК).
Эта серия машин имеет следующие особенности:
принята единая шкала номинальных высот оси вращения машины;
установочные размеры машины однозначно увязаны с высотой оси вращения, но не определяются мощностью машины;
для каждой высоты оси вращения приняты три значения длины, которым соответствуют три обозначения длины станины; S — для коротких, М — средних и L — длинных машин.
Тахогенераторы - представляют собой маломощные электрические генераторы постоянного тока мощностью 10— 50 Вт и служат для преобразования частоты вращения в электрические сигналы (напряжение U) в системах автоматики и для измерения частоты вращения валов различных механизмов. На тепловозах с электрической передачей они используются в цепи автоматического регулирования мощности дизеля и в цепи главного генератора.
Как правило, тахогенераторы являются двухполюсными машинами независимого возбуждения или с возбуждением постоянными магнитами генерируют напряжение 3—5 В с частотой вращения до 1000 об/мин и 12—-110 В с частотой вращения до 10 000 об/мин. Точность работы их определяется постоянством сопротивления нагрузки, линейной зависимостью выходного напряжения от частоты вращения якоря U = t (п) и крутизной выходного напряжения, которая выражается в вольтах на 1000 об/мин. Номинальная крутизна выходного напряжения тахогенераторов общего применения около 50 В на 1000 об/мин.
Нагрузкой тахогенераторов являются таховольтметры или цепи обратной связи устройств автоматики, которые потребляют ничтожно малый ток. Нагрузку таких элементов электрических цепей удобно выражать не в амперах, а в омах.
Установим зависимость между выходным
напряжением, частотой вращения и
нагрузкой тахогенераторов. Согласно
выражению (В. 10), ЭДС тахогенератора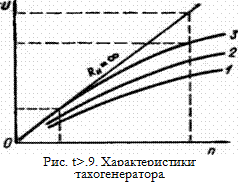
![]()
где U = 1HRH — выходное напряжение тахогенератора на зажимах нагрузки; RH — сопротивление нагрузки тахогенератора; /н—ток нагрузки тахогенератора.
Сварочные генераторы - это устройства, работающие на основе бензиновых и дизельных электрогенераторов, и имеющие функцию сварки, помимо возможности генерирования электроэнергии. Сварочные генераторы применяются в быту и на производстве, где необходимо проведение сварочных работ, при отсутствии источника электроэнергии.
- Плавная или ступенчатая регулировка сварочного тока, при постоянной скорости вращения двигателя.
- Тихая, легко запускаемая сварочная дуга, сварка вертикальных швов сверху вниз.
- Современные двигатели с верхним расположением клапанов Briggs&Stratton – Vаnaguard или HONDA.
- Мощные синхронные генераторы.
- AC - Переменный ток = Сварка переменным током для простых обычных сварочных работ.
- DC - Постоянный ток = Сварка постоянным током для профессиональных сварочных работ.