

Лабораторна робота № 3 Визначення характеристик датчиків пересувань
Мета роботи:вивчити будову та принцип дії тензорезисторів, потенціометричних та індуктивних датчиків пересувань.
Короткі відомості з теорії
Тензорезистори працюють за принципом перетворення зовнішнього впливу на активний опір чутливого елемента. Частіше використовуються дротяні тензорезистори, які виконуються як спіраль (решітка) із кількох петель тонкої, діаметром 0,02…0,05 мм, дротини з високоомного матеріалу, наприклад константану. Кінці спіралі з’єднуються з мідними виводами. Спіраль розташовується між двома шарами тонкого паперу (рис. 1). Сторона спіралі b називається базою тензорезистора.
Тензорезистори наклеюються на попередньо підготовлену поверхню і сприймають її деформації в напрямку бази. Таким чином, вхідною величиною буде деформація поверхневого шару, на який наклеєний тензорезистор. Якщо поверхневий шар розтягується, то база тензорезистора збільшується і, навпаки, при стисненні – зменшується.
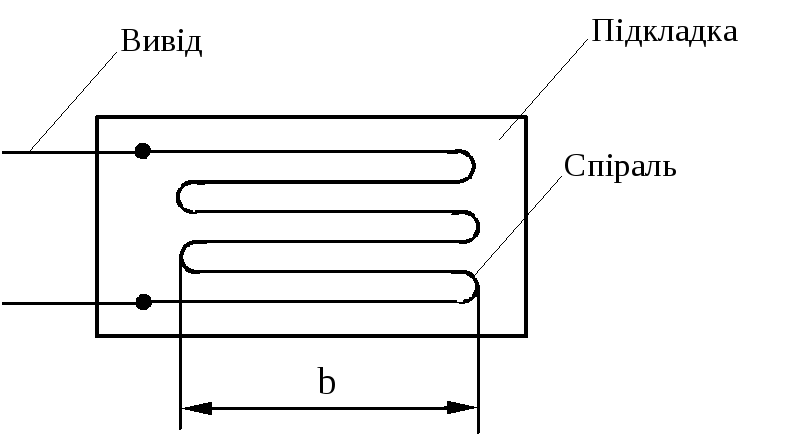
Рис. 1. Схема тензоризистора
Отже вихідною величиною тензорезистора буде його омічний опір R, який залежить не тільки від довжини дроту l, а й від питомого опору матеріалу та площі поперечного перерізу дроту Ад
При деформаціях поверхні з наклеєним тензорезистором одночасно змінюються всі три параметра, які визначають опір тензорезистора. У результаті його опір змінюється на величину R. Якщо відносна деформація поверхні
то відносна зміна опору
Тому статична характеристика тензорезистора (рис. 2) реверсивна і лінійна для відносних деформацій, які не перевищують 1…1,5 %.
Одним з основних показників тензорезистора є коефіцієнт відносної тензочутливості
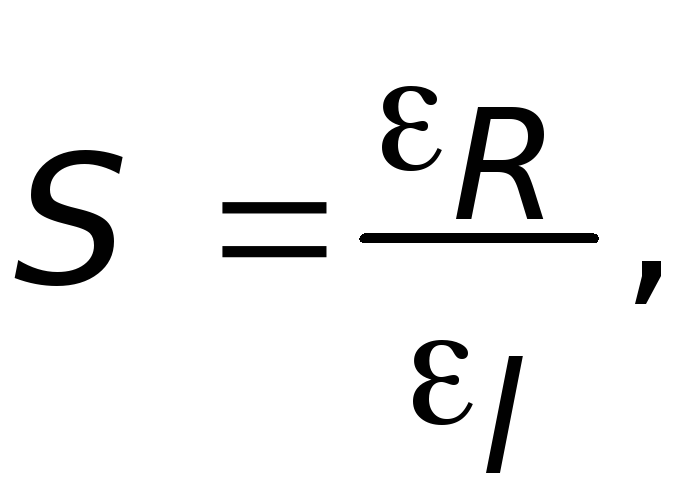
величина якого залежить від коефіцієнта Пуассона
![]() .
.
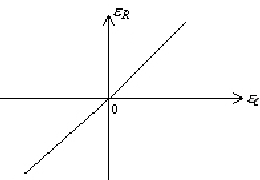
Рис. 2. Статична характеристика тензорезистора
Для металів = 0,24…0,4, тому S = 1,48...1,8. Експериментально встановлено, що S має велике значення. Це пояснюється впливом деформацій на питомий опір металу. Промисловістю випускаються тензорезистори з базою 2...200 мм і опором 30...500 Ом.
Як вимірювальне коло звичайно використовується мостова схема. Якщо потрібно компенсувати вплив температури на опір тензорезистора, то одне плече моста, розташоване поруч з тензорезистором, виконується у вигляді такого ж ненавантаженого тензорезистора, який розташовується поряд з навантаженим.
Потенціометричні датчики використовуються для перетворення кутових або лінійних переміщень в електричний сигнал.
Конструктивно потенціометричний датчик має вигляд каркасу з ізоляційного матеріалу з одношаровою обмоткою з тонкого проводу високого питомого опору. За формою каркас визначається функціональною залежністю опору від переміщення повзуна. На рис. 3 показано датчик для вимірювання кута повороту. Його щітка (повзун) (1) при обертанні осі (3) пересувається вздовж витків обмотки, укладеної на круглому алюмінієвому каркасі (6), покритому ізоляційним лаком. Кінці обмотки (4, 5) з’єднуються з джерелом живлення. Струмопровід (2) у вигляді спіральної пружини є одним із виводів, до якого підключається навантаження.
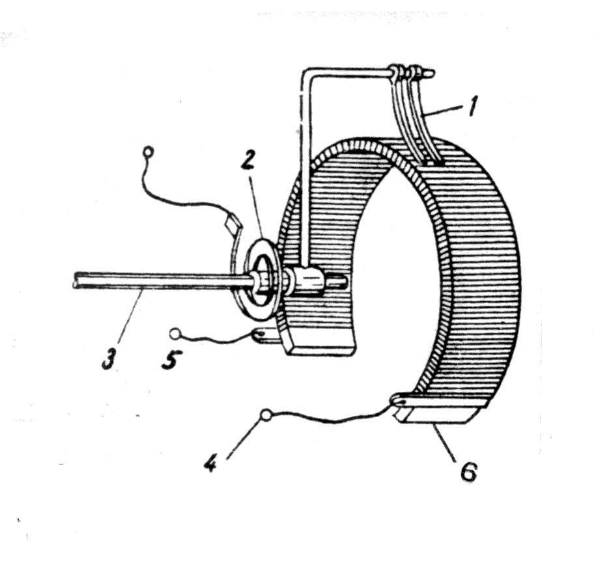
Рис. 3. Потенціометричний датчик кута повороту
При роботі датчика каркас з обмоткою закріплені нерухомо, а повзун здійснює пересування по обмотці. Тому опір обмотці між повзуном і одним з її виводів змінюється. Якщо датчик вмикається за схемою ділення напруги, то на виході схеми буде змінюватись напруга.
Статичні характеристики потенціометричних датчиків вважаються приблизно лінійними, якщо опір навантаженню Rн підвищує опір датчика R в 10…100 разів. Реверсивна статична характеристика (рис. 4) має місце при двотактній схемі вмикання датчика.
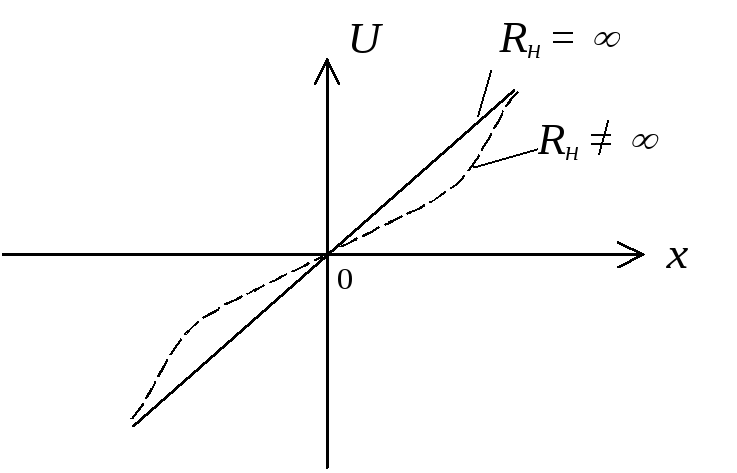
Рис. 4. Статична реверсивна характеристика потенціометричного датчика
На
рис. 4 пунктиром показана характеристика
датчика з навантаженням![]() (U -
напруга на виході схеми вмикання, х
- вхідна величина).
(U -
напруга на виході схеми вмикання, х
- вхідна величина).
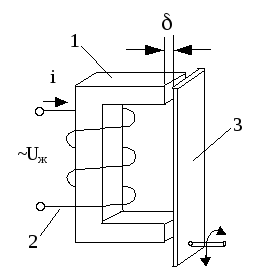
Рис. 5. Індуктивний датчик
Функція перетворювання датчика
![]() ,
,
де
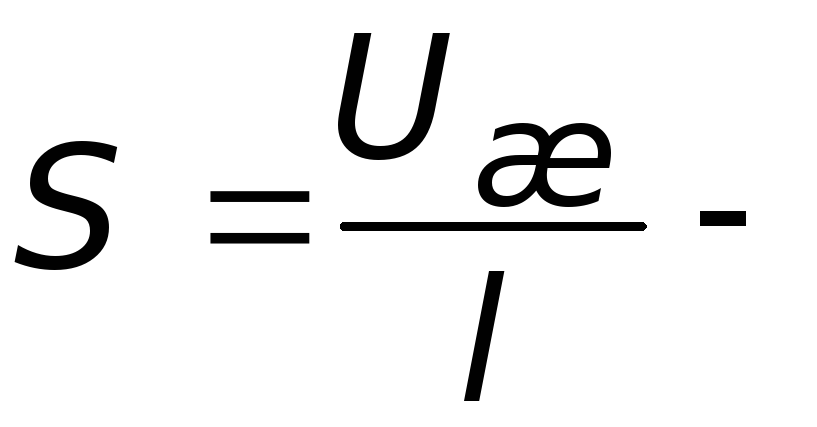 чутливість датчика по напрузі,
чутливість датчика по напрузі,
Uж - напруга живлення,
l - довжина обмотки.
Для вимірювання невеликих пересувань можна використовувати індуктивні датчики. Найпростішим є датчик, виконаний на базі сталевого магнітопровода (1) з обмоткою (2), відносно якої пересувається якір (3) (рис. 5).
Якщо якір займає положення, при якому площа перекриття зазору найбільша (так, як показано на рис. 5), то опір магнітного потоку буде найменшим:
![]() ,
,
де
![]() -
довжина зазору між якорем та осердям,
-
довжина зазору між якорем та осердям,
![]() -
магнітна проникність повітря,
-
магнітна проникність повітря,
![]() -
площа перекриття зазору.
-
площа перекриття зазору.
Коли якір змінює своє положення, повертаючись на деякий кут, то площа Ад змінюється і опір Rm зростає. Таким чином, індуктивність обмотки датчика буде змінюватись. Струм, який протікає в обмотці, залежить від напруги живлення Uж і магнітного опору так:
![]() ,
,
де
![]()
W - кількість витків обмотки.