

1.5.4. Класифікація систем за способом керування
Перший рівень класифікації систем за способом керування показує, чи входить до системи керувальний пристрій (рис. 6).

Рис. 6. Класифікація систем за способом керування
Другий рівень містить чотири основні типи керування, які різняться ступенем відомості траєкторії, що приводить систему до мети, і можливості керувальної системи утримувати керовану систему на цій траєкторії.
I тип: траєкторія та правильне керування Uq(t) відомі. Тоді можна не звертати уваги на розвиток подій. Такий тип керування називають керуванням без зворотного зв'язку.
II тип: процеси на некерованих входах Vq (t) відрізняються від передбачених раніше чи дія неврахованих входів виявляється істотною, і система "сходить із потрібної траєкторії". Потрібна інформація про поточну траєкторію y{t), а також додаткове керування для повернення виходів системи на потрібну траєкторію yo(t). Такий спосіб керування називається регулюванням. Приклад регулювання в біології — рефлекси.
III тип: неможливо задати опорну програмну траєкторію на весь період часу чи відхилення від неї настільки велике, що неможливо повернутися до неї. Керування полягає в підстроюванні параметрів системи доти, доки траєкторія y(t) не перетне цільову область.
IV тип: мета для даної системи недосяжна. Тоді змінюють структуру системи в пошуках такої, щоб можна було потрапити в цільову область. Отже, виконують перебір різних систем з однаковими входами X. Таке керування називається структурною адаптацією.
1.5.5. Класифікація систем за ступенем ресурсної забезпеченості керування
Щоб керувальна система могла виконувати свої функції, потрібна модель керованої системи, на якій досліджують різні типи керування. Для того щоб модель "запрацювала", чи була актуалізована, треба витратити ресурси: потрібно не тільки втілити модель у якомусь реальному вигляді, але й забезпечити отримання рішення потрібної якості й у потрібний момент часу.
Наявні ресурси не завжди дають змогу повністю виконати ці умови, тому виникають принципово різні ситуації залежно від ступеня забезпеченості керування ресурсами. Це відображено в класифікації систем на рис. 7.
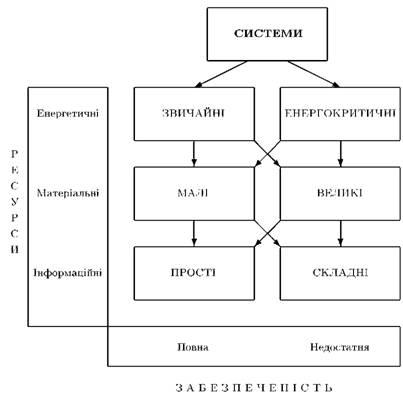
Рис. 1. Класифікація систем за ступенем ресурсної забезпеченості керування
Розглянемо енергетичні витрати на актуалізацію моделі й організацію керування. Зазвичай вони дуже малі порівняно з кількістю енергії, споживаної чи вироблюваної в керованій системі, тому їх просто не беруть до уваги. Однак виникають ситуації, коли, по-перше, керувальна та керована системи живляться від одного обмеженого джерела енергії, і, по-друге, енергоспоживання обох систем має однаковий порядок: виникає нетривіальний клас задач про найкращий розподіл енергії між ними. Такі задачі доводиться розв'язувати не часто, але у відповідальних випадках (наприклад, енергоємні задачі для автономних систем, зокрема космічних апаратів або дослідницьких роботів).
Системи, моделювання яких проблематичне внаслідок їх великої розмірності, називаються великими.
Перевести великі системи в розряд малих можна двома способами:
1) розробити потужніші обчислювальні засоби;
2) розкласти багатовимірну задачу на сукупність зв'язаних задач меншої розмірності (якщо природа системи дає змогу зробити це).
Складною називається система, у моделі якої бракує інформації для ефективного керування. Отже, властивість простоти чи складності — це відношення між керованою та керувальною системами чи між системою та її моделлю.
Зробити складну систему простою можна двома способами:
1) з'ясувати конкретну причину складності, одержати інформацію, якої бракувало, і включити її в модель — основне завдання науки й пізнання взагалі та системного аналізу зокрема;
2) змінити мету (у технічних системах це зазвичай неефективно, але у відносинах між людьми може бути єдиним виходом).
Щоб було зрозуміліше, чим різняться великі та складні системи, зазначимо можливі чотири варіанти систем:
• малі прості;
• малі складні;
• великі прості;
• великі складні.
Наведемо приклади систем усіх видів (у тому самому порядку):
• справні побутові прилади (праска, годинник, телевізор тощо) — для користувача; несправні — для майстра; шифрозамок — для власника сейфа;
• несправний побутовий прилад — для користувача;
• шифрозамок — для викрадача (проста тому, що достатньо лише перебрати всі варіанти, і велика тому, що для відкриття сейфа може не вистачити часу на перебір варіантів); точний прогноз погоди
на наступний день; повний міжгалузевий баланс (його визначають із затримкою на роки);
• мозок; економіка; живий організм.