

Вихідні дані асинхронного двигуна.
Числа
фаз обмоток статору і ротору
![]() ,
тобто рівні
,
тобто рівні
Лінійна
напруга на фазі статору
![]() .
.
Потужність, кВт
Pn=11.0;
Номінальна частота обертання, об/хв
nn=715;
Частота обертання магнітного поля n0, об/хв
n0=750;
Перевантажувальна
здатність
![]()
lam=2.9;
ПАРАМЕТРИ СТАТОРУ
Коефіціент
потужності
![]() номінальний та при холостому ході
номінальний та при холостому ході
cosfnom=0.67; cosf0=0.22;
Номінальний
струм статору,
![]() А
А
I1n=30.8;
Струм
намагнічування при холостому ході,
![]() А
А
I10=22.2;
Активний
опір фази статору,
![]() Ом
Ом
r1=0.43;
Індуктивний
опір фази статору
![]() ,
Ом
,
Ом
x1=0.515;
ПАРАМЕТРИ РОТОРУ
Номінальна
ЕРС фази ротору (ЕРС на кільцях розімкненого
ротору),
![]() ,
В
,
В
Ernom=155;
Номінальний
струм
![]() ,
А
,
А
I2n=46.7;
Активний
опір фази ротору
![]() ,
Ом
,
Ом
r2=0.084;
Індуктивний
опір фази статору,
![]() ,
Ом
,
Ом
x2=0.171;
Момент
інерції,
![]() ,
кг/м2
,
кг/м2
J=0.6;
Номер схеми включення на динамічне гальмування згідно до табл 1
ind=4;
Розрахунок.
Частина1. Параметри заступної схеми асинхронного двигуна та статичні механічні характеристики
Вид заступної схеми приведений на рисунку.
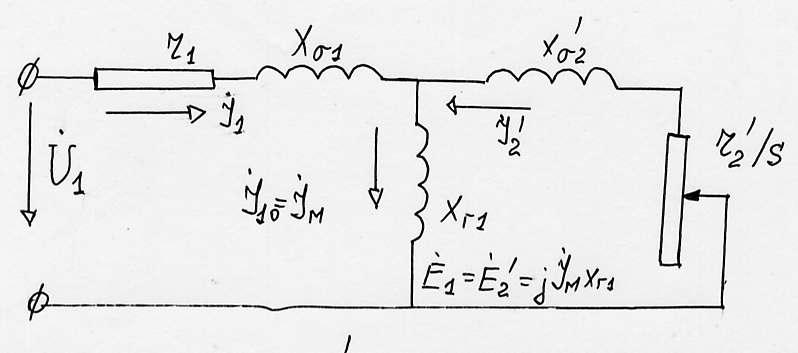
Рисунок 1 – Заступна схема асинхронного двигуна при його живленні від джерела напруги
Коефіцієнт приведення опорів вторинної обмотки до первинної і параметри схеми :
![]() (1)
(1)
де
![]() -
числа фаз статору і ротору, а оскільки
-
числа фаз статору і ротору, а оскільки
![]() - вимірюється міх кільцями ротору і є
лінійною, то
- вимірюється міх кільцями ротору і є
лінійною, то
![]() є лінійною ЕРС фази статору.
є лінійною ЕРС фази статору.
kr=(0.95*380/Ernom)^2
ke=sqrt(kr)
kr =
5.4244
ke =
2.3290
Опори
заступної схеми. При обчисленні опору
намагнічуючого контуру прийнята фазна
ЕРС статору як
![]()
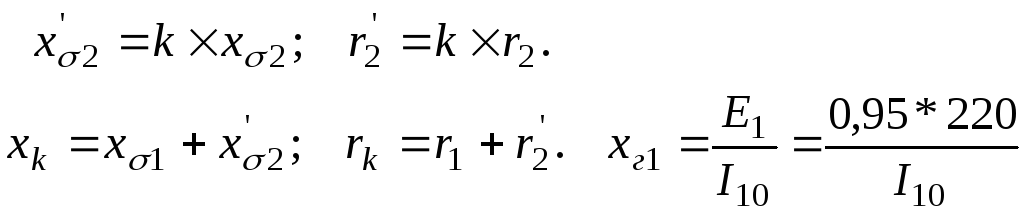 (2)
(2)
x21=kr*x2
r21=kr*r2
xk=x1+x21
x0=0.95*220/I10
Номінальний опір ротора
![]() Ом (3)
Ом (3)
R2nom=Ernom/I2n/sqrt(3)
Механічна характеристика асинхронного двигуна традиційно представляється у вигляді залежності моменту від ковзання двигуна М(s).
Ковзання
![]() ,
навпаки
,
навпаки
![]() ,.
,.
sn=(n0-nn)/n0
x21 =
0.9276
r21 =
0.4556
xk =
1.4426
x0 =
9.4144
Вид характеристики визначається формулою Клосса
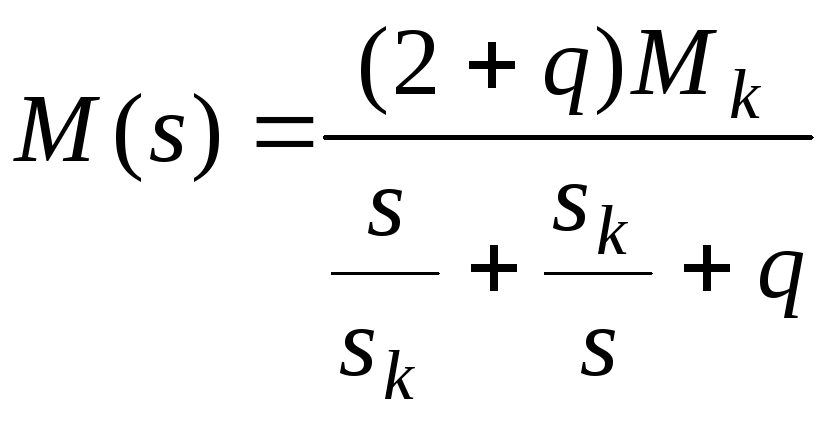 . (4)
. (4)
Де sk - критичне ковзання
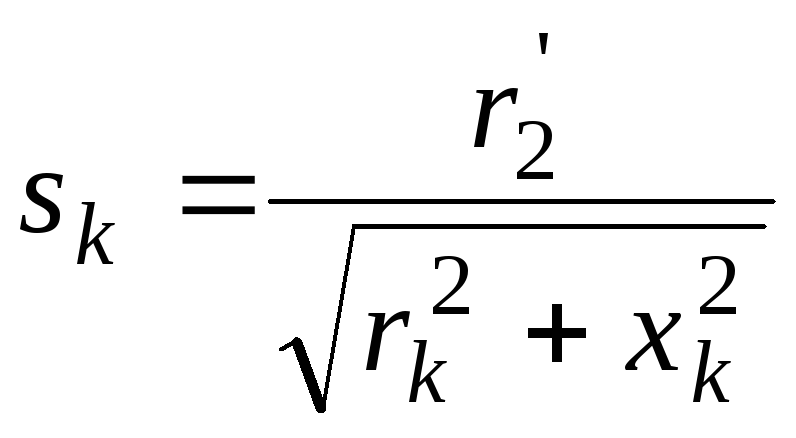 (5)
(5)
sk=r21/sqrt(r1^2+xk^2)
R2nom =
1.9163
Мк - критичний момент, Нм
 (6)
(6)
w0=n0*pi/30;
q=2*r1/sqrt(r1^2+xk^2)
q =
0.5713
sn =
0.0467
U1f=220;
Mk=3*U1f^2/2/w0/(r1+sqrt(r1^2+xk^2))
Mk =
477.6389
sk =
0.3027
(Перевірка перевантажувальної здатності:
l=Mk/(Pn*1e+3*30/pi/nn)
l =
3.2512
sk =
0.3027
порівняти із табличною
lam nk =
522.9768
По
формулах
![]() слід побудувати таблиці значень
характеристик (природню та штучні), а
самі характеристики зображувати графічно
на міліметрівці. При побудові реостатної
характеристики слід врахувати опір
роторного ланцюга
слід побудувати таблиці значень
характеристик (природню та штучні), а
самі характеристики зображувати графічно
на міліметрівці. При побудові реостатної
характеристики слід врахувати опір
роторного ланцюга
![]() .
Прийнято
.
Прийнято
![]()
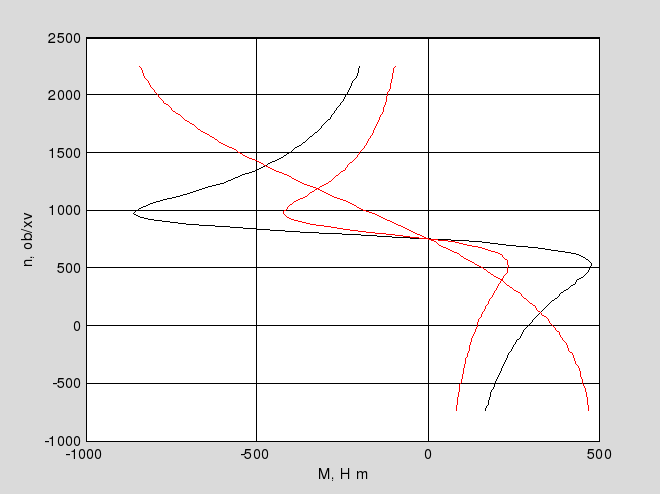
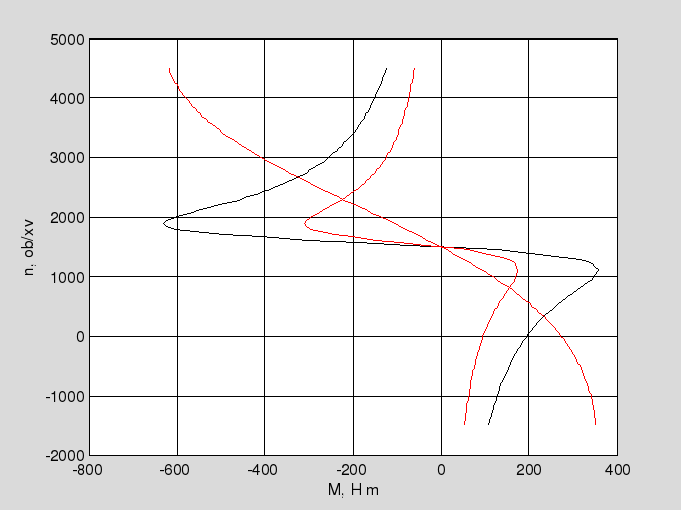
Механічні характеристики
s=[-2:0.03:2];
ni=n0.*(1-s);
% Природня характеристика
M=(2+q)*Mk./(s/sk+q+sk./s);
I_2=U1f./sqrt((r1+r21./s).^2+xk^2);
% Характеристика при снижении напряжения 0,7U1f
U1i=0.7*U1f;
Mki=3*U1i^2/2/w0/(r1+sqrt(r1^2+xk^2));
Miu=(2+q)*Mki./(s/sk+q+sk./s);
I_2iu=U1i./sqrt((r1+r21./s).^2+xk^2);
% Реостатная характеристика
r_2i=r21+0.3*R2nom* kr;
ski=r_2i/sqrt(r1^2+xk^2);
Mir=(2+q)*Mk./(s/ski+q+ski./s);
I_2ir=U1f./sqrt((r1+r_2i./s).^2+xk^2);
kharM1=figure;
figure(kharM1);
kharI1=figure;
plot (M, ni,'k-', Miu, ni, 'r-',Mir, ni,'r--')
grid on
Xlabel(' m, h m')
ylabel('n, ob/xv')
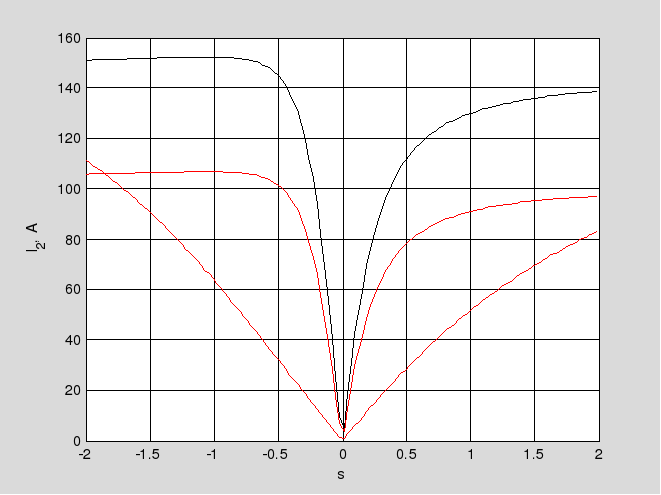
Електромеханічні характеристики
figure(kharI1);
plot (s, I_2,'k-', s, I_2iu, 'r-', s, I_2ir, 'r--')
grid on
ylabel(' I_2, A')
Xlabel('s')
xmu =
Columns 1 through 6
21.1396 21.1396 19.9471 18.1923 16.2613 14.4996
Columns 7 through 10
13.0322 11.8199 10.8047 9.9438
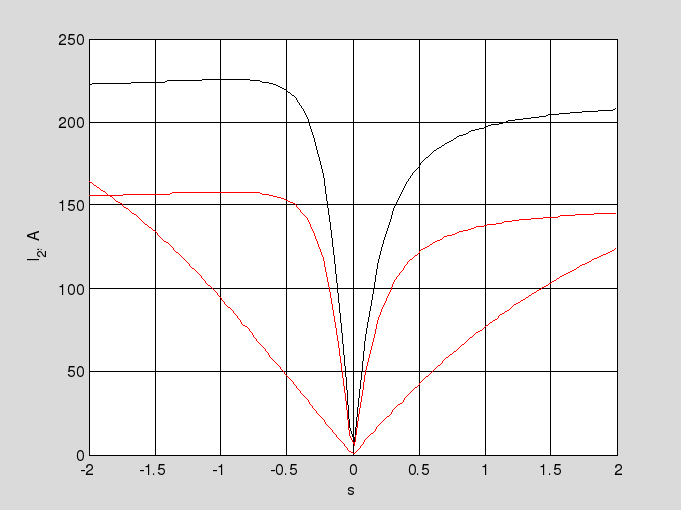
На обох графіках
такі позначення - природня
харакетристика на графіку – суцільна
чорна лінія, суцільна червона лінія –
характеристика при зниженні напруги
статору до 0,7 U1ф, а переривчаста
червона лінія – реостатна характеристика
при введені в фазу ротора додаткового
опору
![]() .
.
При
![]() механічна характеристика близька до
лінійної залежгності,
механічна характеристика близька до
лінійної залежгності,
![]() ,
а в області великих ковзань має
гіперболічний характер
,
а в області великих ковзань має
гіперболічний характер
![]() .
При
.
При
![]() момент набуває максимальних значень,
причому в руховому режимі (
момент набуває максимальних значень,
причому в руховому режимі (![]() )
відповідне значення критичного моменту
)
відповідне значення критичного моменту
![]() ,
ніж в генераторному режимі (
,
ніж в генераторному режимі (![]() ).
Різниця моментів оцінюється кількісно
).
Різниця моментів оцінюється кількісно
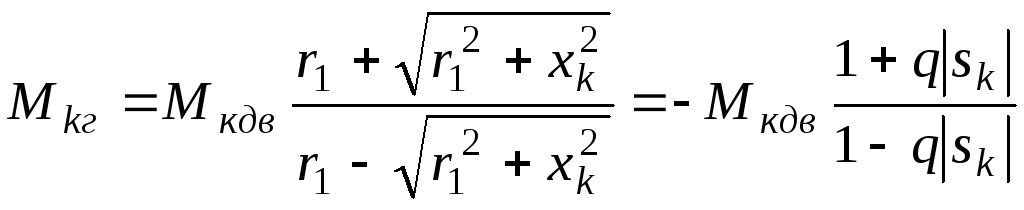 (7)
(7)
Пояснення виду
механічної характеристики асинхронного
двигуна полягає в аналізі залежностей
моменту двигуна від струму ротора і
потоку двигуна (![]() ).
).
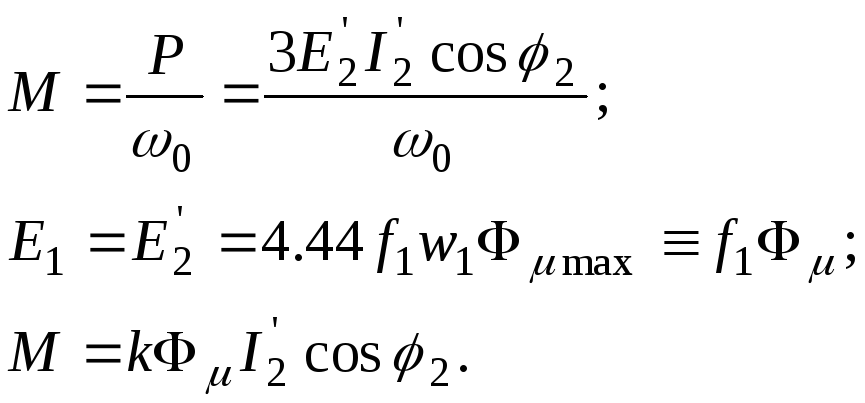 (8)
(8)
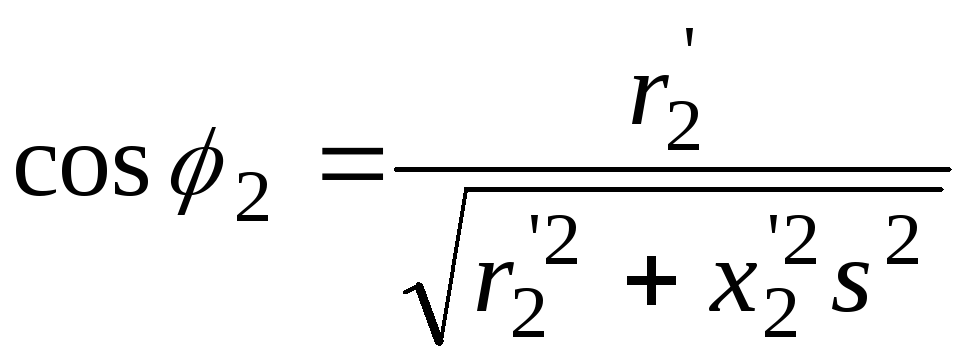
Т.
ч. залежність моменту від ковзання
визначається характером зміни потоку,
струму ротора і
![]() при змінах ковзання.
при змінах ковзання.
Розглядаючи
залежність
![]() можна переконатися, що в області рухового
режиму
можна переконатися, що в області рухового
режиму
![]() струм ротора монотонно зростає, прагнучи
при
струм ротора монотонно зростає, прагнучи
при
![]() до асимптоти
до асимптоти
![]() .
В генераторному режимі
.
В генераторному режимі
![]() легко виявляється максимум
легко виявляється максимум
![]() ,
відповідний до
,
відповідний до
![]() ,
причому струм ротора при
,
причому струм ротора при
![]() прагне до тієї ж асимптоти, що і в руховому
режимі. Подібний вид має і залежність
струму статора
прагне до тієї ж асимптоти, що і в руховому
режимі. Подібний вид має і залежність
струму статора
![]() ( у режимі хх
( у режимі хх
![]() ).Залежність
).Залежність
![]() від ковзання можна отримати за допомогою
схеми заміщення, як:
від ковзання можна отримати за допомогою
схеми заміщення, як:
 .
Отже,
.
Отже,
![]() при зростанні модуля ковзання монотонно
убуває, прагнучи при
при зростанні модуля ковзання монотонно
убуває, прагнучи при
![]() до нуля.
до нуля.
Якщо
прийняти, що магнітний потік
![]() можна дійти висновку, що момент двигуна
при малих ковзаннях, де
можна дійти висновку, що момент двигуна
при малих ковзаннях, де
![]() міняється повільно, повинен зростати
при збільшенні ковзання приблизно
пропорційно струму
міняється повільно, повинен зростати
при збільшенні ковзання приблизно
пропорційно струму
![]() . В області ж великих ковзань, навпаки,
струм
. В області ж великих ковзань, навпаки,
струм
![]()
![]() і змінюється мало, тоді момент долджен
знижуватися приблизно за тим же законом,
що і
і змінюється мало, тоді момент долджен
знижуватися приблизно за тим же законом,
що і
![]() .
Максимум моменту настає при ковзанні,
якому відповідає умова
.
Максимум моменту настає при ковзанні,
якому відповідає умова
![]() .
.
Насправді
ж ЕРС
![]() і магнітний потік
і магнітний потік
![]() двигуна при роботі в руховому режимі у
міру зростання навантаження і зв"язаного
з ним падіння напруги в колі статора
знижуються. Це зниження носить монотонний
характер і додається до розглянутого
вище впливу змін
двигуна при роботі в руховому режимі у
міру зростання навантаження і зв"язаного
з ним падіння напруги в колі статора
знижуються. Це зниження носить монотонний
характер і додається до розглянутого
вище впливу змін
![]() ,
не міняючи характеру залежності
,
не міняючи характеру залежності
![]() .
Наявність максимуму струму в кривій
.
Наявність максимуму струму в кривій
![]() в області генераторного режиму пояснюється
тим, що у зв'язку із зміною фази струму
статора і падіння напруги на опорі
в області генераторного режиму пояснюється
тим, що у зв'язку із зміною фази струму
статора і падіння напруги на опорі
![]() ЕРС двигуна і потік
ЕРС двигуна і потік
![]() в області малих ковзань продовжують
зростати і перевищують значення,
відповідні ідеальному холостому ходу.
При великих ковзаннях визначальним
стає падіння на опорі
в області малих ковзань продовжують
зростати і перевищують значення,
відповідні ідеальному холостому ходу.
При великих ковзаннях визначальним
стає падіння на опорі
![]() ,
тут ЕРС і потік знижуються аналогічно
зниженню ЕРС і потоку в руховому режимі
роботи. Цим обумовлені максимум ЕРС і
потоку в генераторному режимі і
відповідний йому максимум струму ротора,
і, як наслідок, максимум моменту в
генераторному режимі більший, ніж в
руховому.
,
тут ЕРС і потік знижуються аналогічно
зниженню ЕРС і потоку в руховому режимі
роботи. Цим обумовлені максимум ЕРС і
потоку в генераторному режимі і
відповідний йому максимум струму ротора,
і, як наслідок, максимум моменту в
генераторному режимі більший, ніж в
руховому.
Частина 2. Характеристики асинхронного двигуна в режимах динамічного гальмування
З живленням АД від джерела струму тісно пов'язане режим динамічного гальмування АД. Цей режим обумовлений живленням обмотки статора постійним струмом, при цьому магнітне поле статора нерухоме і ротор гальмується в постійному магнітному полі. Постійний струм статора при цьому не пов'язаний індуктивно з ротором. Динамічне гальмування двигуна з самозбудженням є простим, економічним і ефективним способом збільшення діапазону регулювання швидкості при спуску вантажів, тому його застосування інтенсивно розширюється.
Схема включення АД на динамічне гальмування:
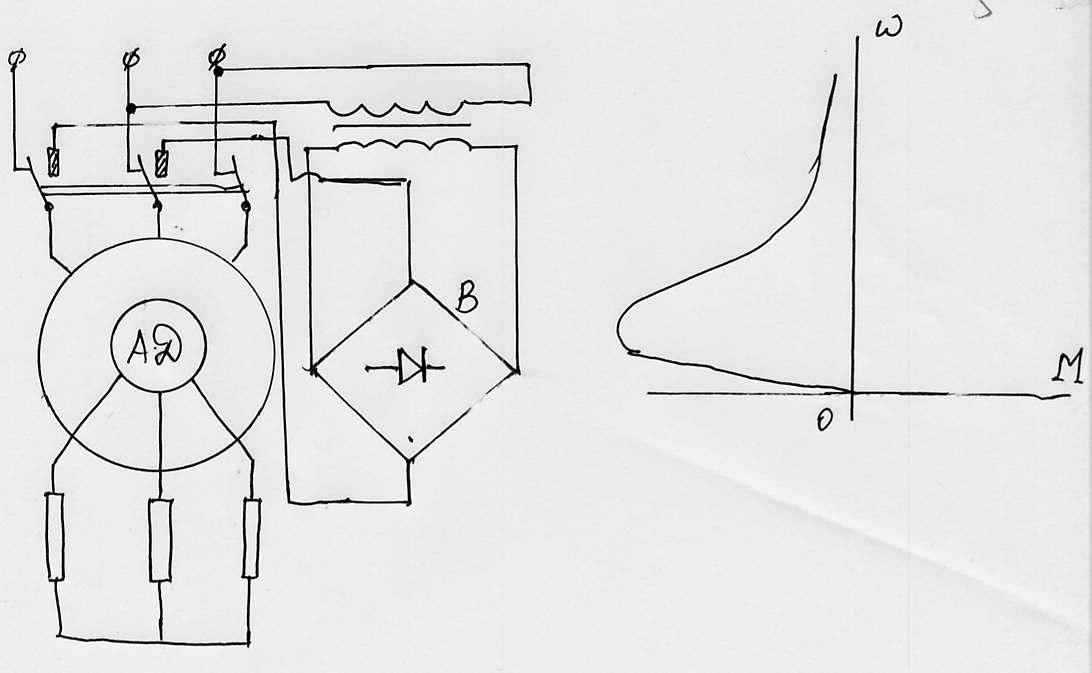
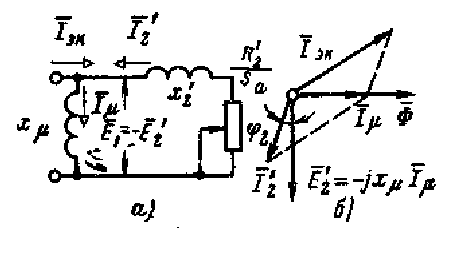
Рисунок 2 - Включення АД на динамічне гальмування, еквівалентна заступна схема режиму і відповідна їй векторна діаграма
При розрахунку живлення обмотки статора постійним струмом Iп приводиться до еквівалентної схеми живлення від трифазного струму I1экв. Умовою такого эквивалентирования є рівність МДС, cоздаваемых постійним струмом Iп при вибраній схемі з'єднань обмотки статора при гальмуванні і еквівалентним змінним струмом I1.
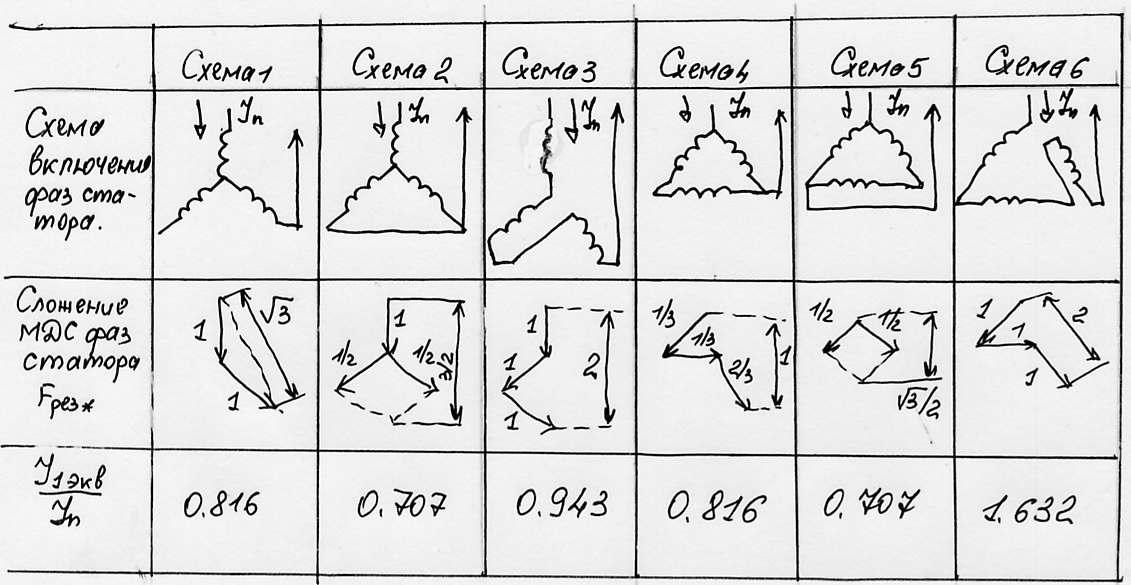
МДС системи трифазного струму I1экв визначається відомою з теорії машин змінного струму формулою
![]() ,
відповідно, МДС при живленні від джерела
постійного струму і включенні за заданою
схемою гальмування прирівнюється до
Fэкв,
звідки виходять співвідношення I1экв,
приведені в таблиці 1:
,
відповідно, МДС при живленні від джерела
постійного струму і включенні за заданою
схемою гальмування прирівнюється до
Fэкв,
звідки виходять співвідношення I1экв,
приведені в таблиці 1:
Таблиця 1 - Можливі схеми включення обмоток статора АД на динамічне гальмування
Слід мати на увазі, що при динамічному гальмуванні
![]() а основні
співвідношення
а основні
співвідношення
![]() згідно до схеми рис.3 та векеторної
діаграми рис.2 мають вигляд
згідно до схеми рис.3 та векеторної
діаграми рис.2 мають вигляд
![]()
![]()
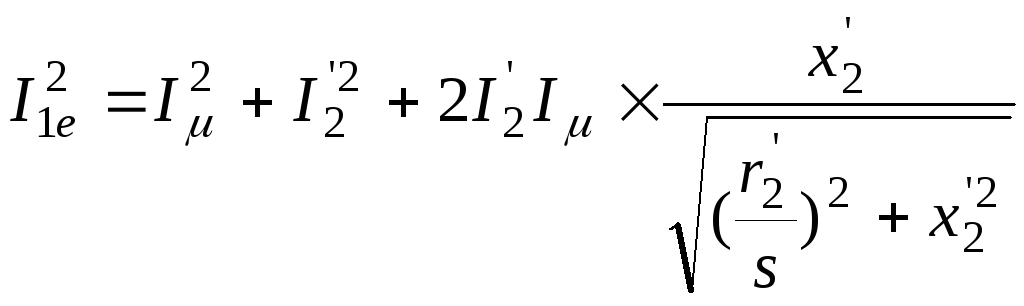 звідки
звідки
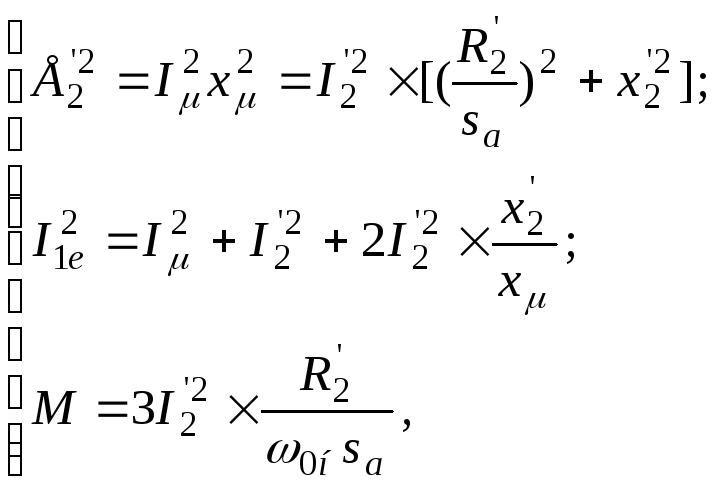 (9)
(9)
Тому на базі формул (9) будується подальший алгоритм розрахунку процесу.
Подальший алгоритм розрахунку вірізняється тим, що як вихідний аргумент приймається не зміна ковзання, як раніше, а зміна насичення контура Г- образної схеми заміщення (її вхідного намагнічуючого опору), що має місце при динамічному гальмуванні, а потрібні нам значення ковзання, струму і моменту розраховуються.
Критичний момент та криртичне ковзання при динамічному гальмуванні визначаються як
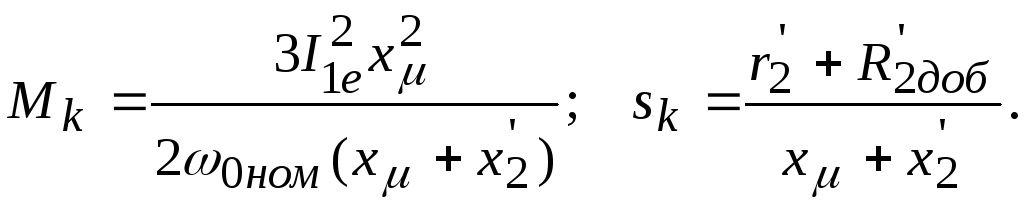
Заступна схема при динамічному гальмуванні (живленні двигуна від джерела струму)
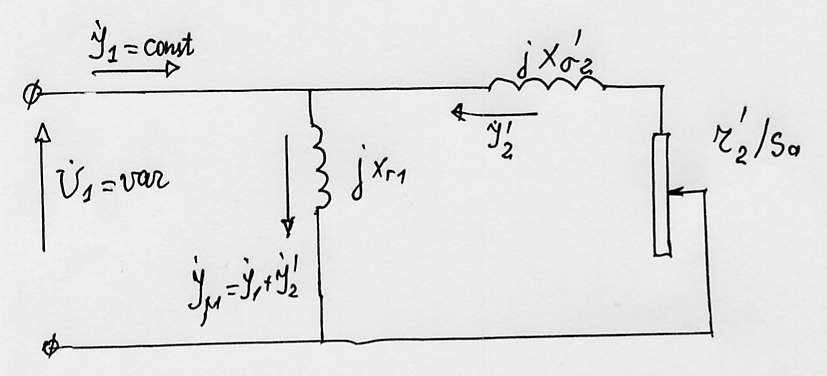
Рисунок 3 – Заступна схема асинхронного двигуна при його живленны выд джерела струму
Алгоритм розрахунку режиму динамічного гальмування
Універсальна
характеристика намагнічування АД у
в.о.
 →
→
 →
→
![]() →
→
→
 →
→
 →
→
 →
→
→
 (10)
(10)
Примусове динамічне гальмування із величиною постійного струму 3I10 .
Згідно до табл. 1 введіть номер схеми включення обмотки статору на динамічне гальмування
switch ind
case 1
ki=0.816
case 2
ki=0.707
case 3
ki=0.943
case 4
ki=0.816
case 5
ki=0.707
case 6
ki=1.632
otherwise
disp('невірно задано номер схеми')
end
ki =
0.8160
R11 =
0.8022
I1экв визначається за таблицею еквівалентування (табл. 1) для заданої схеми включення на динамічне гальмування
Еквівалентний струм при динамічному гальмуванні, А
I1e=ki*3*I10
I1e =
54.3456
Нижче наведено табличний алгоритм розрахунку динамічного гальмування для розглядуваного випадку
Таблиця 2
|
Общие данные для любых токов возбуждения |
Данные для принятого постоянного тока возбуждения |
||||||||
|
Кривая намагничивания |
Вспомогат. расчеты |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
0,2 |
0,26 |
|
|
|
|
|
|
|
|
|
0,4 |
0,52 |
|
|
|
|
|
|
|
|
|
0,6 |
0,736 |
|
|
|
|
|
|
|
|
|
0,8 |
0,895 |
|
|
|
|
|
|
|
|
|
1,0 |
1,0 |
|
|
|
|
|
|
|
|
|
1,2 |
1,07 |
|
|
|
|
|
|
|
|
|
1,4 |
1,122 |
|
|
|
|
|
|
|
|
|
1,6 |
1,163 |
|
|
|
|
|
|
|
|
|
1,8 |
1,196 |
|
|
|
|
|
|
|
|
|
2,0 |
1,223 |
|
|
|
|
|
|
|
|
Стовпці 1 і 2 таблиці є універсальною кривою намагнічування АД у в.о.
Характеристика намагничівання у в.о
.I_0=[0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2];
E_f1=[0.26 0.52 0.736 0.895 1 1.07 1.122 1.163 1.196 1.223];
Стовпці 3 і 4 Намагнічуючий струм в А та ЕРС фази статору у В

де I10 – номинальний струм намагнічування статору,
U1n=380;
Imu=I10.*I_0
Efc=0.95*U1n.*E_f1
Imu =
Columns 1 through 6
4.4400 8.8800 13.3200 17.7600 22.2000 26.6400
Columns 7 through 10
31.0800 35.5200 39.9600 44.4000
Efc =
Columns 1 through 6
93.8600 187.7200 265.6960 323.0950 361.0000 386.2700
Columns 7 through 10
405.0420 419.8430 431.7560 441.5030
Стовпець 5 – реактивний опір намагнічуючого кола Хг1
![]() ,
,
Опір намагнічуючого контуру, який відповідає характеристиці намагнічування xmu=Efc./Imu
sk1 =
2.8908
Стовпець 6
z1=I1e^2.-Imu.^2
z1 =
1.0e+003 *
Columns 1 through 6
2.9337 2.8746 2.7760 2.6380 2.4606 2.2438
Columns 7 through 10
1.9875 1.6918 1.3566 0.9821
z2=1+2*x21./xmu
z2 =
Columns 1 through 6
1.0878 1.0878 1.0930 1.1020 1.1141 1.1279
Columns 7 through 10
1.1424 1.1570 1.1717 1.1866
I_2dt=sqrt(z1./z2)
I_2dt =
Columns 1 through 6
51.9331 51.4070 50.3965 48.9276 46.9961 44.6009
Columns 7 through 10
41.7111 38.2396 34.0271 28.7693
Стовпець7
r_2n=sqrt((Efc./I_2dt).^2-x21^2)
r_2n =
Columns 1 through 6
1.5511 3.5319 5.1899 6.5381 7.6253 8.6108
Columns 7 through 10
9.6663 10.9400 12.6546 15.3183
Стовпці 8 Швидкість на природній характеристиці у об/хв
ne=r21./r_2n.*n0
ne =
Columns 1 through 6
220.3132 96.7579 65.8469 52.2688 44.8163 39.6871
Columns 7 through 10
35.3536 31.2373 27.0048 22.3091
Столвпeць 9 момент у Нм:
Mdt=-3.*(I_2dt).^2.*r_2n./w0
Mdt =
Columns 1 through 6
-159.7979 -356.5172 -503.4881 -597.8445 -643.2961 -654.2759
Columns 7 through 10
-642.3808 -611.0497 -559.6689 -484.2829
Динаміка асинхронного приводу (без урахування електричної постійної часу), визначається відповідно до основного рівняння приводу як:
 ,
,
Звідки визначається закон зміни швидкості при перехідному процесі

![]() – механічна
постійна часу. Час протікання перехідного
процесу (гальмування і ін.) виявляється
відповідно до функції критичної величини
ковзання sk, тобто параметрів АД. Ця
чудова властивість АД знаходить своє
пояснення в самому виді механічної
характеристики АД, що має екстремум в
критичній точці. Існує мінімум часу
протікання перехідного процесу при
варіації параметрів роторного кола.
– механічна
постійна часу. Час протікання перехідного
процесу (гальмування і ін.) виявляється
відповідно до функції критичної величини
ковзання sk, тобто параметрів АД. Ця
чудова властивість АД знаходить своє
пояснення в самому виді механічної
характеристики АД, що має екстремум в
критичній точці. Існує мінімум часу
протікання перехідного процесу при
варіації параметрів роторного кола.
У режимі
динамічного гальмування (![]() ,
час гальмування визначається як
,
час гальмування визначається як![]() .
Мінімальний час
.
Мінімальний час
![]() при
при
![]()
Приведений оптимальний опір роторного кола і розрахований з нього оптимальний гальмівний опір роторного кола для режиму динамічного гальмування, Ом:
R_2dtopt=0.407*sqrt(r1^2+(x1+x21)^2)
R_2dtopt =
0.6127
R2dobdt=(R_2dtopt-r21)/kr
R2dobdt =
0.0289
Постіна
часу динамічного гальмування
![]() ,
сек
,
сек
Tdt=J*w0/abs(max(Mdt))/0.407
Tdt =
0.7246
Критичний момент при динамічному гальмуванніу порівняннііз критичним моментом на природній харакетристиці:
abs(max(Mdt))
Mk
ans =
159.7979
Mk =
477.6389
Час гальмування мінімальний, с :
(1.5*0.407+1/4/0.407)*Tdt
ans =
0.8874
Стовпець 10 . Перерахунок штучної реостатної характеристики для оптимального опору гальмування
 .
.
ndti=ne.*(R_2dtopt/r21)
Mdtr=(-3.*(I_2dt).^2).*r21./(w0.*(ndti./nn))
ndti =
Columns 1 through 6
296.2279 130.0985 88.5362 70.2794 60.2589 53.3624
Columns 7 through 10
47.5356 42.0010 36.3101 29.9963
Mdtr =
Columns 1 through 6
-113.3001 -252.7783 -356.9838 -423.8844 -456.1106 -463.8956
Columns 7 through 10
-455.4616 -433.2473 -396.8171 -343.3669
Побудова характеристик режиму динамічного гальмування – механічні у в.о. чорна – природня, а червона - оптимальна реостатна:
kharmdt=figure;
figure(kharmdt);
plot (Mdt, ne,'k-',Mdtr, ndti, 'r-' )
grid on