

6 Исследование прямых оценок качества регулирования
6.1 Цель работы
Целью работы является изучение методов проектирования систем с использованием прямых показателей качества регулирования в переходном и установившемся режимах.
6.2 Общие сведения
Показатели качества, определяемые непосредственно по переходным характеристикам, называют прямыми оценками качества, а сам метод их вычисления называется прямым. Менее точные методы оценки качества называются косвенными, к ним относятся корневые, частотные и интегральные методы.
Время регулирования tрег равно времени от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки ∆ (рисунок 8). Зону допустимой ошибки ∆=0,05·h(∞) или ∆=0,05·ε(0) откладывают с обеих сторон от линии установившегося значения. При ненулевых начальном или установившемся значениях в качестве допустимой зоны принимают 5% от разницы соответственно |h(∞)–h(0)| или |ε(∞)–ε(0)|. Поскольку иногда принимают ∆=2 %, необходимо указывать, для какого критерия 5 или 2 % найдено tрег.
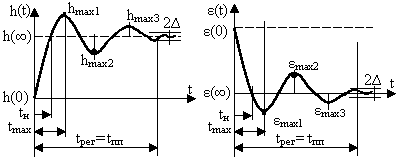
а) – выходная величина y(t) б) – ошибка регулирования ε(t)
или h(t) или отклонение δ(t)
Рисунок 8
Перерегулированием σ называется величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
 или
или
 .
.
Перерегулирование характеризует склонность системы к колебаниям, рекомендуются значения не более 15…30 %.
Время нарастания tн, характеризует скорость реакции в начальный период, определяется как:
- время от начала процесса до момента пересечения кривой с линией установившегося значения – этот метод не подходит для оценки монотонных процессов, когда характеристика приближается к установившемуся значению асимптотически в течение бесконечного интервала времени;
- промежуток времени между моментами достижения заданных уровней (например, 10 и 90 %) установившегося значения – более универсальный метод.
Очевидно, что при указании времени нарастания следует указывать, каким способом оно получено.
Время достижения первого максимума tmax (подразумевается, что первый максимум кривой является и наибольшим из всех).
Коэффициент колебательности N – число забросов переходной характеристики через линию установившегося значения за время регулирования.
Установившаяся ошибка характеризует точность системы в статическом режиме, после окончания переходного процесса. Если установившаяся ошибка ε(∞) = 0, система называется астатической, для случая ε(∞) ≠ 0 система называется статической. Статическая система всегда имеет ошибку регулирования, которую можно уменьшить, увеличивая общий коэффициент усиления системы.
6.3 Указания к работе
Предварительно для построения переходных характеристик по выходу e(t) относительно входа r(t) и выходу y(t) относительно входа f(t) необходимо рассчитать обе соответствующие передаточные функции с учетом окончательно выбранных k1 и kос (работы 4 и 5). Используется программа EILERPIC "Переходная характеристика" из библиотеки LinCAD, которая по введенным коэффициентам числителя и знаменателя передаточной функции строит отклик системы на единичный скачок от нуля до заданного момента времени (рисунок 9).
Длительность периода исследования подбирают экспериментально так, чтобы к концу периода переходный процесс заканчивался, но в то же время все параметры характеристики легко определялись. После нанесения на график вспомогательных построений и необходимых вычислений должны быть определены (с учетом масштаба) значения перерегулирования, времени регулирования, коэффициента колебательности, времен нарастания и максимума, сделана оценка – к какому виду систем (астатические, статические) и относительно какого входа (типа воздействия) относится данная система регулирования.
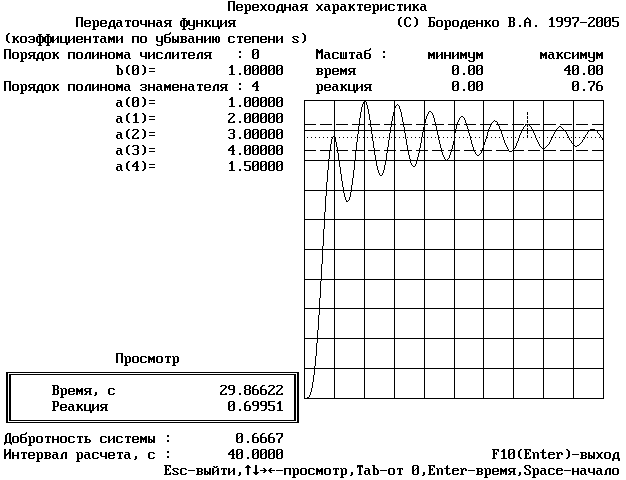
Рисунок 9