

Електропостачання
.pdf6.4 За результатами розрахунків побудувати механічну та регулювальну характеристики двигуна з електромагнітною муфтою ковзання.
7 ЗМІСТ ЗВІТУ
7.1Привести дані електродвигуна і електрмагнітної муфти ковзання.
7.2Навести таблиці з даними спостережень і розрахунків.
7.3Побудувати механічні характеристики двигуна
привода з ЕМК 2 f (IЗ ) при U~=Uном і різних струмах збудження ІЗ1, ІЗ2, ІЗ3.
7.4Побудувати природну характеристику двигуна за паспортними даними.
7.5Графічна частина повинна бути виконана на міліметровому папері.
8 КОНТРОЛЬНІ ЗАПИТАННЯ
8.1Назвіть основні елементи електромагнітної муфти ковзання (ЕМК)?
8.2Поясніть принцип роботи ЕМК?
8.3Яким чином здійснюється регулювання швидкості веденого вала?
8.4Яким чином можна досягнути стабілізації роботи привода при регулюванні швидкості в приводі з ЕМК?
8.5Яке призначення основних елементів схеми
(рисунок. 6.3)?
71
|
Таблиця 6.1 - Дані дослідів і результати розрахунків |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Результати дослідів |
|
Результати розрахунків |
|||||||||
|
|
Характе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
ристики |
U1~ |
U2 |
I2 |
1 |
2 |
U3 |
I3 |
PГ, |
ΔPМ, |
ΔP0, |
P, |
PВ, |
МВ, |
|
|
приводу |
В |
В |
A |
Об |
Об |
В |
A |
Вт |
Вт |
Вт |
Вт |
Вт |
кг* |
|
|
|
|
|
|
/хв |
/хв |
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механічна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
характерис |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
приводу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
з ЕМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 = f(Mв) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Регулю- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вальна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
характерис |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
приводу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з ЕМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2 = f(І2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛАБОРАТОРНА РОБОТА №7
ДОСЛІДЖЕННЯ І НАЛАДКА ЕЛЕКТРОПРИВОДУ АВТОМАТИЗОВАНОЇ ЗАСУВКИ
Мета роботи: дослідження електроприводу автоматизованої засувки
1 ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
У зв’язку із впровадженням системи автоматизованого керування у технологічних схемах водо- і нафтонасосних станцій, нафтопарків і нафтобаз широко поширені засувки з електроприводом, що має дистанційне та автоматизоване керування.
Для |
автоматизованого |
керування |
засувкою |
використовується наступне обладнання: реле рівня, або тиску, шляхові вимикачі, командоапарати та ін.
Імпульс на запуск електродвигуна засувки подається за допомогою контактів реле рівня або реле тиску. В роботі імпульс на закриття та відкриття засувки створюють контакти
приладу ЕСР-1 (електронний сигналізатор рівня).
Принцип дії сигналізатора роівня заснований на перетворенні величини ємності давача, що змінюється залежно від зміни рівня середовища в сигнал керування комутуючого реле.
Прилад дозволяє здійснювати звукову та світлову сигналізації при досягненні заданого рівня рідини, а також увімкнення та вимкнення виконавчих механізмів.
Шляхові вимикачі встановлюються на корпусі засувки. Вони спрацьовують залежно від шляху, пройденого штоком засувки. Спрацювання шляхових вимикачів - замикання чи розмикання їх контактів – є імпульс для перемикань в колах управління та сигналізації. Шляхові вимикачі також встановлються для того, щоб запобігти перехід механізму за кінцеве його положення.
73
Такі вимикачі називають кінцевими вимикачами. Контакти шляхових вимикачів застосовують, в основному, у колах керування.
Для керування електроприводами засувок у заданій послідовності застосовуються командоапарати з відповідною
програмою.
На щитах керування та сигналізації розміщені кнопки, перемикачі та сигнальні лампочки. Перемикачами вмикається будь-яка засувка на автоматизоване керування по заданій програмі. Дистанційне керування здійснюється за допомогою кнопочних станцій.
Сигнальні лампи монтуються на щиті двома групами:
–перша група знаходиться на мнемосхемі технологічного процесу, яка сигналізує відкриття чи закриття засувки;
–друга група ламп вказує, який період циклу здійснюється в поточний час та як перемикаються засувки на початку кожного нового періоду.
Автомати чи вимикачі, контактори та апаратура захисту приводного електродвигуна засувки зазвичай монтуються на магнітних станціях.
2 ПРОГРАМА РОБОТИ
2.1Ознайомлення з конструкцією засувки та апаратурою, яка необхідна для схеми.
2.2Запис технічних даних обладнання.
2.3Збирання схеми.
2.4Налагодження, увімкнення схеми керування та її випробування у різних режимах.
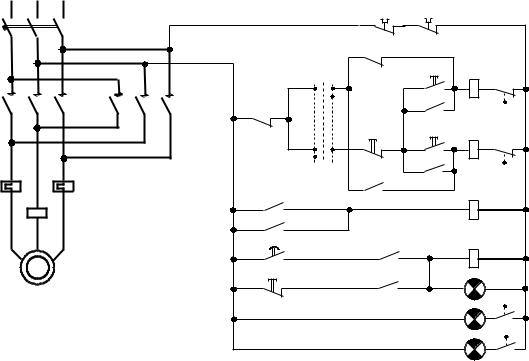
3 ОПИС СХЕМИ УСТАНОВКИ
Принципова схема автоматизованої засувки подана на рисунку 7.1. Керування засувкою може бути автоматизованим або дистанційним в залежності від положення універсального перемикача SА. Якщо останній знаходиться в положенні “А”
74
(автоматизоване керування), імпульс на запуск електродвигуна засувки подається контактами KQQH (реле рівня нижнього електронного сигналізатора рівня), відкриваючи її, або контактами KQQB (реле рівня верхнього), закриваючи засувку.
Коли рівень рідини у резервуарі знаходиться нижче нижнього положення, контакти KQQH - закриті, отримує живлення котушка магнітного пускача KM1, яка замикає силові контакти KM1 і вмикає двигун на відкриття засувки. Одночасно замикається блок-контакт КМ1 в колі котушки реле часу КТ.
Зупинка електродвигуна в кінцевому положенні засувки здійснюється кінцевим вимикачем SQ3, який розмикається. При цьому замикається контакт SQ4 і загоряється червона лампочка HLR, яка сигналізує, що засувка повністю відкрита.
При відкритій засувці рідина наповнює резервуар. Рівень досягає верхнього положення, внаслідок чого замикається замикаючий контакт KQQВ отримує живлення котушка магнітного пускача KM2, яка замикає силові контакти і вмикає двигун на закриття засувки. Одночасно замикаються блокконтакти КМ2 в колі котушки реле часу КТ.
Зупинка двигуна при повністю закритій засувці здійснюється за допомогою SQ1, який розмикається і обезживлює котушку КМ2. Одночасно замикається SQ2 і загоряється зелена лампочка HLG.
На період пускового режиму передбачається блокування для захисту від пускового струму. Блокування здійснюється за допомогою реле часу KT, яке замикає свій контакт в колі реле KL тільки після закінчення витримки часу, достатньої для спадання пускового струму.
Захист від перевантаження двигуна здійснюється за допомогою теплових реле KK1 і KK2, контакти яких під час перевантаження розмикаються в колі катушок контакторів KM1 або KM2, останні втрачають живлення і розмикають силові контакти, вимикаючи двигун засувки з мережі.
У схемі керування передбачений захист приводу засувки від надмірних механічних зусиль, які виникають при заїданні механізму засувки, а також при повному закритті засувки, коли важко зробити повну зупинку за допомогою кінцевих вимикачів. Захист здійснює реле максимального струму KA, що знаходиться у колі статора двигуна M.
75
При зростанні моменту, а отже, і струму двигуна, реле KA спрацьовує і своїм замикаючим контактом подає живлення на котушку аварійного реле KL, яке розмикаючим контактом KL знеструмлює кола котушок магнітних пускачів KM1 і KM2. Одночасно замикається контакт KL і загоряється аварійна лампочка HLY (жовта). Після усунення аварійного режиму реле KL деблокується кнопкою SBT2.
При переході на дистанційне керування засувкою перемикач SА ставиться в положення D. Увімкнення двигуна здійснюється кнопками SBCB – на відкриття і SBCЗ – на закриття засувки, а зупинка - кнопкою SBT1.
4 ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1Зібрати схему керування.
4.2Перевірити схему керівником роботи.
4.3Ввімкнути автоматичний вимикач QF.
4.4Дослідити дистанційне (ручне) керування засувкою – перемикач SА поставити в положення D.
4.5Дослідити автоматизоване керування засувкою – перемикач SА поставити в положення А.
5 ЗМІСТ ЗВІТУ
5.1Накреслити схему керування та привести її короткий
опис.
5.2Навести технічні дані електрообладнання.
5.3Зробити висновки про роботу засувки.
6 КОНТРОЛЬНІ ЗАПИТАННЯ
6.1Для чого застосовуються засувки?
6.2Як працює схема автоматизованого керування засувкою?
6.3Пояснити призначення реле KA, КК?
6.4Які функції виконує реле КТ?
76
77
78
|
~3 х 220 |
|
|
|
|
|
|
|
|
А |
В |
С |
|
|
|
KK1 |
KK2 |
|
|
QF1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KQQН |
|
|
|
|
|
|
|
|
SА |
SBCВ |
KM1 SQ3 |
||
|
|
|
|
-45 |
0 |
+45 |
|
||
KM1 |
|
|
KM2 |
|
|
А |
KM1 |
|
|
|
|
KL |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SBT1 |
SBCЗ |
KM2 |
SQ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
KM2 |
|
|
KK1 |
|
|
KK2 |
|
|
KQQВ |
|
|
|
|
|
|
|
|
|
KТ |
|
||
|
|
KА |
|
KM1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
KM2 |
|
|
|
|
|
|
|
|
|
KT |
|
KА |
|
KL |
|
|
|
|
|
|
|
|
|
|
|
|
|
M1 |
|
SBT2 |
|
KL |
HLY |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HLR |
SQ4 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
HLG |
SQ2 |
|
|
|
|
|
|
|
|
|
||
Рисунок 7.1 – Принципова схема електроприводу автоматизованої засувки
ЛАБОРАТОРНА РОБОТА № 8
ДОСЛІДЖЕННЯ АВТОМАТИЗОВАНОЇ КОМПРЕСОРНОЇ УСТАНОВКИ
Мета роботи: Дослідження схеми керування компресорною установкою та її налагодження
1. ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
Стискання повітря і газу для промислових цілей та для транспортування їх по трубопроводах здійснюється компресорами - поршневими і відцентровими. На компресорних станціях магістральних газопроводів при наявності джерела зовнішнього електропостачання використовують відцентрові нагнітачі
компресори з електричним приводом.
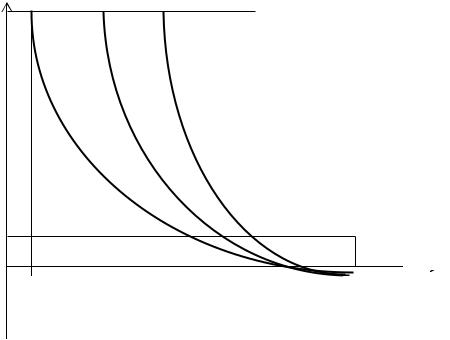
Потужність електродвигуна поршневого компресора може бути визначена на основі індикаторної діаграми стискання повітря або газу . Така діаграма подана на рисунку 8.1.
Деяка кількість газу стискається у відповідності з діаграмою від початкового об’єму V1 і тиску р1 до кінцевого об’єму V2 і тиску р2 . На стискування газу витрачається робота , яка буде різною в залежності від характеру процесу стискання. Цей процес може здійснюватись по адіабатному закону - крива 1 , по ізотермічному закону при постійній температурі - крива 2 , або по
політропі - крива 3.
Робота при стисканні газу для політропного процесу
визначається за формулою: |
|
|
|
|
|
|
|||
|
|
|
|
|
|
m 1 |
|
||
|
m |
|
р2 |
m |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
A |
|
|
р1 V1 |
|
|
|
|
1 , Дж / кг , |
(8.1) |
|
|
|
|
|
|||||
П |
|
|
|
|
|
|
|
|
|
|
m 1 |
|
р1 |
|
|
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де m - показник політропи;
р1 - початковий тиск газу , Па ; р2 - кінцевий тиск стисненого газу , Па;
V1 - початковий питомий об’єм газу при всмоктуванні , м3.
79
P
P2 |
2 |
3 |
1 |
P1
V
V2 V1
Рисунок 8.1 – Індикаторна діаграма
Потужність електродвигуна визначається за формулою:
P |
AП Q |
10 3 , кВт |
(8.2) |
|
|||
|
k П |
|
|
Q - продуктивність компресора; |
|
||
k - індикаторний ККД компресора , який враховує втрати потужності в ньому при реальному робочому процесі ;
П - ККД механічної передачі між компресором і електродвигуном .
80