

Електропостачання
.pdfТаблиця 2.1 – Результати дослідів і дані розрахунків
№ |
Режим |
Результати вимірів |
|
|
Результати обчислень |
|
|
При- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п/п |
роботи |
|
Iя |
U |
Р1 |
Рм |
Рщ |
Рд |
Ро |
|
Рв |
Мв |
мітка |
|
|
|
|
|
|
|
|
|
|
|
|
|
х 1,5 |
|
|
об/ хв |
А |
В |
Вт |
Вт |
Вт |
Вт |
Вт |
|
Вт |
кг м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При- |
Генера- |
|
|
|
|
|
|
|
|
|
|
|
|
родна |
торний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
харак- |
режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
терис- |
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигун- |
|
|
|
|
|
|
|
|
|
|
|
|
|
тика |
ний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Rд = 0 |
режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Штуч- |
Генера- |
|
|
|
|
|
|
|
|
|
|
|
|
на |
торний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
харак- |
режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
терис- |
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигун- |
|
|
|
|
|
|
|
|
|
|
|
|
|
тика |
ний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Rд 0 |
режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
динамічного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
гальмування |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|

де UЩ – втрати напруги в перехідному опорі щітка- |
||||||||||||
колектор, В. |
|
|
|
|
|
|
|
|
|
|
||
Для вугільно-графітних, графітних та електрографітних |
||||||||||||
щіток |
UЩ=1 В. |
|
|
|
|
|
|
|
|
|||
Додаткові втрати потужності: |
|
|
|
|
|
|||||||
|
|
РД=0,005UІЯ |
|
|
|
|
|
|
(2.11) |
|||
Потужність втрат неробочого ходу (на вентиляцію сталі) |
||||||||||||
визначається за графіком (рисунок 2.5). |
|
|
|
|
||||||||
Сума втрат потужностей в електричній машині складає: |
||||||||||||
|
Р=ΔРМ+ΔРЩ+ΔРД+ΔРО, Вт |
|
|
|
(2.12) |
|||||||
Потужність на валу дорівнює: |
|
|
|
|
|
|||||||
|
|
РВ=Р1– Р, Вт |
|
|
|
|
|
(2.13) |
||||
Момент на валу становить: |
|
|
|
|
|
|||||||
|
|
М |
В |
0,975 РВ |
0,975 Р1 |
Р кГм |
|
|
(2.14) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Втрати холостого ходу - Ро |
|
|
|
|
|||
|
Ро, Вт |
|
|
|
Ро =f( |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
350 |
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
305 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
|
|
250 |
|
|
|
200 |
|
|
|
|
|
|
|
205 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
170 |
|
|
|
|
|
150 |
|
|
|
|
|
135 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
105 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
|
|
50 |
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
200 |
400 |
600 |
800 |
1000 |
1200 |
1400 |
1600 |
1800 |
2000 |
|
|
|
|
|
|
|
|
|
|
|
|
,об/хв |
|
Рисунок 2.5 – Залежність втрат неробочого ходу від |
||||||||||||
|
|
|
|
|
|
швидкості |
|
|
|
|
|
|
6.РОЗРАХУНКИ НА ЕОМ
6.1За результатами лабораторних досліджень здійснити розрахунки механічних характеристик дослідного двигуна на ЕОМ за розрахунковими формулами в системі
MATH-CAD.
6.2Ввести результати досліджень з таблиці 2.1:
кількість точок для кожного режиму і кожної характеристики;
значення швидкості для кожної точки, об/хв;
значення струму, А;
значення напруги, В;
значення втрат неробочого ходу.
6.3Результати розрахунків звести в таблицю 2.1.
6.4За результатами розрахунків побудувати механічні характеристики дослідного двигуна для різних режимів роботи
водних системах координат.
7 ЗМІСТ ЗВІТУ
Взвіті необхідно подати:
7.1Короткі теоретичні положення
7.2Схему експериментальної установки.
7.3Паспортні дані електричних машин, приладів і
апаратів.
7.4Таблиці з даними дослідів і розрахунків.
7.5Механічні характеристики асинхронного двигуна для різних режимів роботи в одних системах координат.
7.6Природну механічну характеристику, розраховану
за паспортними даними двигуна (відобразити на одному графіку з графіками, побудованими за експериментальними даними).
8 КОНТРОЛЬНІ ЗАПИТАННЯ
8.1Запишіть спрощене рівняння механічної характеристики асинхронного двигуна (рівняння Клосса).
8.2Накресліть механічні характеристики асинхронного
двигуна.
8.3Для чого вводять додатковий опір в коло ротора асинхронного двигуна?
8.4Яка механічна характеристика називається природною, штучною?
8.5Яке призначення в лабораторній установці електродвигунів М1, М2, М3, М4, а також приладів і потенціометра RP?
8.6Які види електричного гальмування застосовують для асинхронного двигуна і яка їх фізична суть?
8.7Що є критерієм оцінки механічної характеристики
АД?
8.8Чому не допускається тривала робота AД при введенні великого опору в коло ротора?
ЛАБОРАТОРНА РОБОТА №3
ВИВЧЕННЯ БЛОКУВАЛЬНИХ ЗВ’ЯЗКІВ У СХЕМАХ АВТОМАТИЗОВАНОГО КЕРУВАННЯ
ЕЛЕКТРОПРИВОДАМИ
Мета роботи: вивчення типових схем електричного блокування та отримання досвіду в збиранні цих схем.
1 ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
При електрифікації та автоматизації виробничих процесів у різних галузях промисловості в схемах автоматизованого керування технологічними процесами широко застосовуються електричні блокувальні зв’язки та інше устаткування. Як правило, всі вони побудовані на застосуванні засобів електроавтоматики та електроніки.
Роль та значення схем автоматизованого керування зростає у зв'язку з створенням нових багатодвигунних електроприводів, підвищенням продуктивності та потужності агрегатів, підвищенням швидкості обробки матеріалу за рахунок автоматизації окремих агрегатів, операцій та автоматизації цехів, технологічних процесів та створення повністю автоматизованих виробництв.
Електричні блокувальні зв’язки призначені головним чином для узгодження роботи окремих машин або елементів з метою забезпечення надійного та безаварійного протікання технологічного процесу.
Найбільш розповсюджені такі блокуючі зв'язки:
- блокування, при яких неможлива cпільна робота двох або декількох електроприводів (наприклад, приводу механізму подачі та приводу швидких переміщень на металоріжучих верстатах, при роботі приводу засувок на трубопроводі). Сюди може бути віднесено і взаємне блокування двох контакторів,
що вмикають електродвигун для обертання вперед або назад
(рис. 3.1.);
-блокувальні зв’язки, що забезпечують певну послідовність увімкнення різних механізмів та елементів. Подібні блокування застосовують при автоматизації переважної більшості неперервних технологічних процесів, пов'язаних з переміщенням оброблювального матеріалу. Їх призначення – дозволити увімкнення електроприводів окремих механізмів у послідовності, що попереджує виникнення завалів (рис. 3.2);
-блокування для здійснення потрібної послідовності вимкнення. Їх застосовують також для попередження утворення завалів при зупинці подальшого механізму. У металоріжучих верстатах використовуються блокування між головним приводом та приводом подачі, що забезпечує відключення спочатку приводу подачі, а потім головного приводу;
-блокування для одночасного увімкнення двох двигунів. Наприклад, пуск двигуна насосу змащування відбувається одночасно з двигуном головного приводу.
2 ПРОГРАМА РОБОТИ
2.1Ознайомлення з електричними двигунами та апаратами, необхідними для дослідження схем.
2.2Запис технічних характеристик електричних двигунів та апаратів.
2.3Збирання схеми.
2.4Увімкнення схеми, налагодження та її дослідження.
3 ОПИС СХЕМИ УСТАНОВКИ
Рекомендовані електроприводи для вивчення схеми з застосуванням електричних блокувань показані на рисунках
3.1та 3.2.
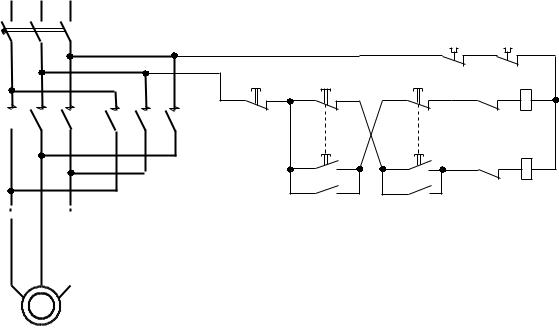
Увипадках, коли за умовами технологічного процесу необхідно змінювати напрямок обертання виробничого механізму, керування двигунами може здійснюватись за допомогою реверсивного магнітного пускача (рис. 3.1.). Подача напруги в кола управління і силове коло електродвигуна здійснюється за допомогою автоматичного вимикача QF.
Увімкнення двигуна для одного напрямку обертання
здійснюється натисканням |
кнопки |
SBCВ -"ВПЕРЕД". |
Котушка KMВ магнітного |
пускача |
отримує живлення і |
замикає силові контакти KMВ, приєднуючи електродвигун до мережі ~3 x 220 В.
Одночасно в колі керування закривається замикаючий блок-контакт KMВ, блокуючи кнопку SBCВ - "ВПЕРЕД". Тоді коло котушки KMВ отримує живлення через свій блокуючий контакт KMВ. Крім того, розмикається розмикаючий контакт KMВ в колі котушки KMН, що виключає можливість одночасного увімкнення двигуна "НАЗАД".
Для увімкнення двигуна на протилежний напрямок обертання необхідно натиснути кнопки SBT – "СТОП", що призводить до вимкнення котушки KMB. Увімкнення двигуна назад здійснюється аналогічно описаному вище, натисканням кнопки SBCH – "НАЗАД". При цьому, як видно з схеми, дві фази в обмотці статора перемикаються і змінюють напрям обертання магнітного поля статора , відповіднонапрям обертання ротора електродвигуна.
~3 х 220
А В С
QF
KMВ 
KK1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KK2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SBT |
SBCВ |
KMН
KK1 KK2
SBCН KMН KMВ
KMВ KMН
KMВ KMН
M
Рисунок 3.1 – Схема керування електродвигуном за допомогою магнітного пускача
Крім вищенаведених блокувань, в схемі передбачено блокування за допомогою спарених кнопок SBCB - "ВПЕРЕД" та SBCH – "НАЗАД".
Суміщення електричного та механічного блокування робить схему досить надійною у експлуатації.
Для захисту двигуна від перевантажень передбачені теплові реле КК1 і КК2.
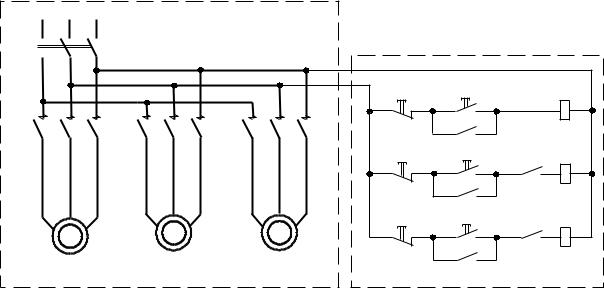
Схема, що подана на рисунку 3.2., забезпечує певну послідовність увімкнення електродвигунів M1, M2 та MЗ. Спочатку повинен бути ввімкнений двигун M1. Увімкнення двигуна здійснюється натисканням кнопки SBC1 "ПУСК 1". Котушка КM1 отримує живлення. В силовому колі замикаються силові контакти КM1, які приєднують двигун до трифазної мережі ~3x220 В. Одночасно в колі керування закриваються: перший блок-контакт КM 1.1, що шунтує кнопку SBC1, та другий контакт КM1.2, який готує для пуску двигун M2 .
Після увімкнення двигуна M1 вмикають двигуни M2, потім M3 за допомогою кнопок SBC2, SBC3 і контактів послідовного блокування КM1.2 та КM2.2.
Вимкнення двигунів здійснюється кнопками „стоп” –
SBT1, SBT2, SBT3.
Якщо вимикається двигун M1 натисканням кнопки SBT1, то автоматично вимикаються двигуни M2 та M3, так як розмикаються блок-контакти КМ 1.2 і КМ 2.2.
4 ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1 Зібрати вказану схему.
4.2 Перевірити її керівником робіт.
4.3 Увімкнути автоматичний вимикач QF, тобто підготувати схему до роботи.
4.4 При вивченні схем провести всі можливі увімкнення для даної схеми і перевірити роботу електричних блокувань.
~3 х 220
А В С
QF 
|
|
|
SBT1 |
SBC1 |
|
KM1 |
|
|
|
|
KM1.1 |
|
|
KM1 |
KM2 |
KM3 |
|
|
|
|
|
|
|
SBT2 |
SBC2 |
KM1.2 |
KM2 |
|
|
|
|
KM2.1 |
|
|
|
|
|
SBT3 |
SBC3 |
KM2.2 |
KM3 |
|
M1 |
M2 |
M3 |
KM3.1 |
|
|
|
|
Силове коло |
Коло управління |
|
||
Рисунок 3.2 – Схема послідовного увімкнення асинхронних електродвигунів