

Електропостачання
.pdf4 ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1Ознайомитись з приладами, апаратами, венти-лятором
ііншим обладнанням експериментальної установки і записати їх технічні характеристики.
4.2Зібрати схему установки (рис.5.4) для експериментального дослідження потужності, споживаної приводом вентилятора, і закрити заслонку системи вентиляції.
4.3Перевірити схему керівником роботи.
4.4Увімкнутии автоматичний вимикач QF1.
4.5Перевести перемикач SA в положеня для живлення обмоток статора С1, С2, С3 від мережі змінного струму.
Впевнившись, що вентилятор обертається в правильному
напрямку при закритій засувці виміряти U, І , Р і в режимі неробочого ходу. Відкрити заслонку, дати установці попрацювати певний час для встановлення сталого режиму, після чого записати покази приладів, що знаходяться в колі статора. Виміряти з допомогою тахометра швидкість обертання валу вентилятора.
П р и м і т к а : Якщо напрям обертання при пуску виявився протилежним потрібному, то необхідно вимкнути установку і змінити послідовності живлення фаз статора, для чого треба пересунути місцями два проводи (дві фази), які підходять до обмоток статора, і знов увімкнути установку.
4.6 Змінюючи навантаження вентилятора з допомогою засувки, виміряти струм, потужність, напругу і частоту обертання. Результати досліджень занести в таблицю 5.1
Таблиця 5.1 – Результати досліджень
№ |
|
|
|
Підведена |
Швидкість |
|
|
Напруга |
Струм |
|
обертання |
Примітка |
|||
дос. |
|
потужність |
|||||
|
|
|
вентилятора |
|
|||
|
|
|
|
|
|
|
|
|
U, B |
I, A |
|
P, кВт |
|
, об/хв |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Наванта- |
|
|
|
|
|
|
ження |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Неробо- |
|
|
|
|
|
|
чий хід |
|
|
|
|
|
|
|
|
|
4.7 Вимкнути |
автомат |
QF1 і |
після зупинки |
електро- |
|||
двигуна, увімкнути автомат QF2. Триполюсний перемикач SA встановити в положення 2 для подачі постійної напруги обмотки на статора електродвигуна в дві фази (С1, С2). Визначити покази приладів при різних положеннях повзунка регулювального реостату RR1. Результати досліджень занести в таблицю 5.2.
Таблиця 5.2 – Результати вимірювання омічного опору
|
Напруга , |
|
Результати |
|
|
|
розрахунків |
||
№ досліду |
U0, B |
Струм, І0, А |
||
r10 |
||||
|
|
|
||
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
4.8На основі результатів досліджень (таблиці 5.1 і 5.2) провести розрахунки і занести результати в таблицю 5.3.
4.9Підрахувати величину омічного опору обмотки статора. При розрахунку використовувати співвідношення для з’єднання обмотки статора зіркою:
r |
|
U 0 |
; |
(5.20) |
||
10 |
|
|
2I 0 |
|
||
|
|
|
|
|||
для з’єднання трикутником: |
|
|||||
r10 |
|
3U0 |
. |
(5.21) |
||
|
||||||
|
|
|
2I0 |
|
||
4.10 Вибрати за каталогом електродвигун, необхідний для
приводу вентилятора, зиписати його технічні дані, а також дати рекомендації, підкріплені розрахунками, про заміну або подальшу експлуатацію встановленого електродвигуна.
Таблиця 5.3 – Дані досліджень і результати розрахунків
|
|
|
Результати розрахунків |
|
|
||||
|
|
|
|
|
|
|
|
|
|
№ |
1 |
S |
1-S |
ΔPМ1 |
ΔPМ2 |
Р0 |
РД |
Р |
Р2 |
досліду |
|
|
|
|
|
|
|
|
|
об/хв |
|
|
Вт |
Вт |
Вт |
Вт |
Вт |
Вт |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 ЗМІСТ |
ЗВІТУ |
|
|
|
|
||||
У звіті необхідно подати
5.1Схему установки та її короткий опис.
5.2Таблиці з даними дослідів та розрахунків.
5.3Розрахувати потужність електродвигуна та вибрати його по каталогу.
5.4Висновки по роботі установки.
6 КОНТРОЛЬНІ ЗАПИТАННЯ
6.1Які існують методи визначення потужності на валу електродвигуна?
6.2Які втрати мають місце в асинхронному електродвигуні, від чого вони залежать і як визначаються?
6.3Яке має значення правильний вибір потужності електродвигуна?
6.4Що є основним для вибору потужності, роду струму, величини напруги, швидкості руху і конструктивного виконання приводного електродвигуна?
6.5В яких випадках доцільно заміняти недостатньо завантажені асинхронні електродвигуни на меншу потужності,
іколи така заміна не дає помітного результату?
6.6Який показник визначає доцільність заміни незавантажених електродвигунів на меншу потужності і як він визначається?
ЛАБОРАТОРНА РОБОТА № 6
ВИВЧЕННЯ ЕЛЕКТРОПРИВОДА З ЕЛЕКТРОМАГНІТНОЮ МУФТОЮ КОВЗАННЯ І ДОСЛІДЖЕННЯ ЙОГО МЕХАНІЧНИХ ХАРАКТЕРИСТИК
Мета роботи: вивчити електропривід з електромагнітною муфтою ковзання (ЕМК ) і дослідити його механічні характеристики.
1 ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
Електропривід з електромагнітною муфтою ковзання призначений для плавного регулювання швидкості робочого механізму. Електромагнітна муфта ковзання служить з’єднювальною ланкою між електродвигуном і робочим механізмом. Електромагнітна муфта ковзання (ЕМК) складається (див. рис. 6.1.) із ведучої частини - індуктора (1), з’єднаного з валом асинхронного двигуна М і веденої частини - якоря (3), зв’язаної з робочим механізмом (4). Індуктор виконується у вигляді масивного стакана із феромагнітного матеріалу. Магнітна система (якір) складається із двох зубчастих феромагнітних дисків, між якими знаходиться обмотка збудження (2). Між індуктором і магнітною системою є повітряний прошарок. Індуктор муфти обертається із швидкістю електродвигуна. При протіканні струму збудження в обмотці виникає магнітний потік, який викликає появу індукованих магнітних струмів в індукторі. Взаємодія цих струмів з магнітним потоком обмотки збудження створює обертовий момент, внаслідок чого частина муфти, яка з’єднана з робочим механізмом, приводиться в рух. При відсутності струму в обмотці збудження Iз (рис. 6.1) швидкість обертання веденої частини муфти відсутня, так як відсутнє ковзання. При рівності швидкостей електродвигуна і веденої частини муфти момент дорівнює нулю (оскільки індукована ЕРС буде рівною нулю).
Таким чином, електромагнітна муфта може передавати момент тільки за наявності ковзання між веденою частиною та індуктором.
Для під’єднання обмотки збудження муфти до джерела постійного струму служать струмознімальні кільця (5) з контактами (6).
Рівняння механічної характеристики привода з муфтою ковзання
д |
K |
M 2 |
, |
(6.1) |
|
|
|||||
|
|
I З |
2 |
|
|
де ,д - відповідно швидкість веденого валу муфти і вала
асинхронного двигуна, об/хв; М – момент, що передається муфтою, кГм;
ІЗ – струм збудження муфти, А; К – коефіцієнт пропорційності.
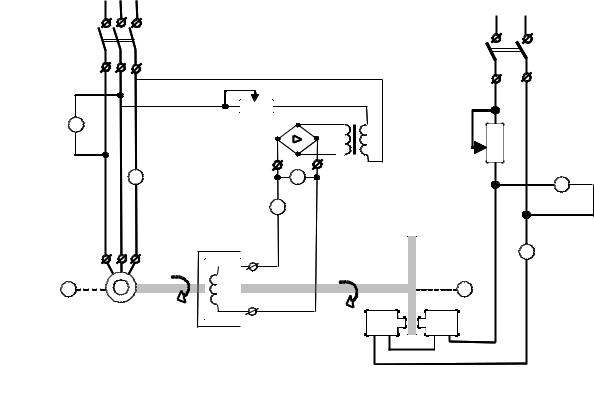
На рисунку 6.3 подана схема випробувань, а на рисунку 6.2 – механічні характеристики привода з електромагнітною муфтою ковзання. Як бачимо, механічні характеристики, що зображені суцільними лініями м’які і їх жорсткість недостатня. Для збільшення стабільності роботи привода під час регулювання швидкості вала РМ необхідно ввести в схему керування привода зворотній зв’язок за швидкістю.
Основною перевагою привода з електромагнітною муфтою ковзання є простота пристрою, легкість обслуговування і великий термін служби.
2 ПРОГРАМА РОБОТИ
2.1Ознайомитися з обладнанням, зняти паспортні дані.
2.2Дослідити механічні характеристики електроприводу
ЕМК.
2.3Дослідити регулювальну характеристику електроприводу з ЕМК.
65
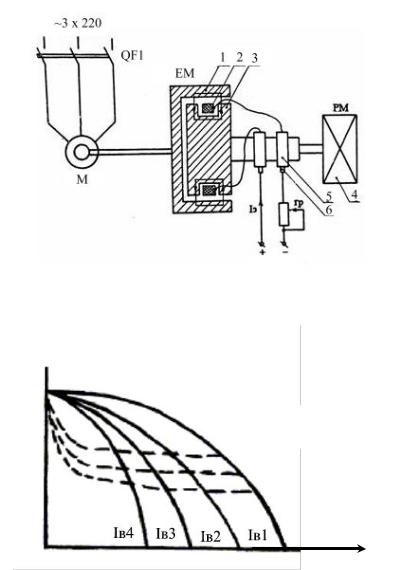
Рисунок 6.1 – Електропривід з електромагнітною
муфтою

Iв1>Iв2> Iв3> Iв4
0 |
M |
|
|
|
|
Рисунок 6.2 – Механічні характеристики приводу з ЕМК
66
3 ОПИС СХЕМИ УСТАНОВКИ
Схема випробування подана на рисунку 6.3. Вона містить асинхронний двигун М, електромагнітну муфту ковзання ЕМК, електричне гальмо ЕГ, яке виконує функцію робочого механізму. Асинхронний двигун вмикається за допомогою автоматичного вимикача QF1. Обмотки електричного гальма ЕГ живляться від джерела постійної напруги 110 В. Увімкнення ЕГ здіснюється за допомогою автоматичного вимикача QF2.
Зміна навантаження на веденому валу здійснюється за допомогою реостата RR2 і контролюється амперметром РА3. Обмотка збудження електромагнітної муфти LEM живиться від випрямляча VD, приєднаного через трансформатор Т до мережі змінного струму. Регулювання струму та встановлення потрібної величини початкового струму в колі обмотки LEM (амперметр РА2) здійснюється за допомогою регулюючого реостата RR1. Для вимірювання швидкості електродвигуна М і
веденого вала ( 2 ) служать тахогенератори М1, М2 і відповідні тахометри.
4 ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1Зібрати схему вказану на рисунку 6.3.
4.2Перевірити схему керівником роботи.
4.3Увімкнути автомати QF1 і QF2.
Знімання механічної характеристики двигуна привода з ЕМК f (M в )
4.4Встановити номінальний струм збудження муфти
EMК за допомогою резистора RR1, контролюючи струм Із за
PА2.
4.5Встановити мінімальний струм в колі ЕГ (за амперметром РА3).
4.6Змінювати навантаження від нуля (чи мінімального)
до номінального значення за допомогою резистора RR2.
67
68
~3x220
= 110
QF1 |
QF2 |
A B C
|
|
|
|
RR1 |
|
|
|
PV1 |
|
|
|
|
|
|
|
|
|
|
|
UD |
|
|
|
|
|
|
|
- |
+ |
|
|
|
|
|
PA1 |
|
Т |
RR2 |
РV3 |
|
|
|
|
|
|||
|
|
|
|
PV2 |
|
|
|
|
|
|
|
PA2 |
|
|
|
|
|
C2 |
C3 |
ЕМК |
|
Диск |
РА3 |
|
C1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M1 |
M |
|
|
L |
ω2 = var |
M2 |
|
|
|
|
E |
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
ω =const |
|
|
ЕГ |
|
|
|
|
1 |
|
|
|
|
Рисунок 6.3 – Схема дослідження електродвигуна з ЕМК
Вимірювати швидкість вихідного вала муфти 2 і швидкість електродвигуна 1 . Струм збудження Iз муфти
підтримувати постійним.
Результати записати в таблицю 6.1 ( покази РV1, РV2, РA2, М1, М2, РV3, PА3 та швидкості 1 і 2 ).
4.7Дослідити механічну характеристику привода при Iз = 0,75Iзном. Струм збудження муфти змінювати за допомогою резистора RR1.
4.8Для кожної характеристики провести 4-5 вимірів при різних величинах навантаження. Змінювати навантаження за допомогою резистора RR2 і контролювати за показами амперметра РА3 (результати занести в табл. 6.1).
4.9Після закінчення дослідження схему привести у вихідне положення: зняти навантаження за допомогою резистора RR2, ввести резистор RR1.
Знімання регулювальної характеристики двигуна
привода з ЕМК 2 f (I3 )
4.10 Змінюючи струм збудження в обмотці LEM муфти резистором RR1, спостерігати за зміною швидкості вихідного
вала муфти 2 .
4.11 Навантаження підтримувати постійним за допомогою резистора RR2, слідкуючи за показами РА3.
4.12 Провести 4-5 вимірювань і результати занести в таблицю 6.1.
4.13Схему повернути у вихідне положення (див. п.4.9).
4.14По закінченню досліджень вимкнути QF2 і QF1.
5 РОЗРАХУНКОВІ ФОРМУЛИ
Потужність, що підводиться до електричного гальма (ЕГ):
PГ |
UIГ , Вт. |
(6.2) |
||
Втрати в обмотці ЕГ: |
|
|
|
|
P |
І |
Г |
2 R , Вт , |
(6.3) |
М |
|
Г |
|
|
де RГ – опір обмотки ЕГ, рівний 900 Ом;
69
ІГ – визначається за показами РА3.
Потужність втрат неробочого ходу визначається експериментально при таруванні машин (рис. 6.4).
Сумарна потужнісить втрат в електродвигуні за виключенням втрат в обмотці збудження
P P0 PM , Вт, |
|
(6.4) |
|||||
де P0 – потіжність втрат неробочого ходу, |
P0 = 5-7 Вт. |
||||||
Потужність на валу ЕМК: |
|
|
|
|
|||
Pв РГ Р, Вт. |
|
|
|||||
Момент на валу: |
|
|
|
|
|
|
|
М |
|
0,975 |
Рв |
, кГм. |
|
|
|
в |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При обчисленні |
величина |
|
P додатна. |
Результати |
|||
розрахунків зводяться в таблицю 6.1. |
|
|
|||||
6РОЗРАХУНОК НА ЕОМ
6.1За результатами лабораторних досліджень здійснити розрахунки механічної та регулювальної характеристики двигуна привода з ЕМК за розраунковими формулами.
6.2Ввести результати досліджень з таблиці 6.1:
-кількість точок характеристики;
-змінна напруга, В;
-напруга на обмотці збудження LEM, В;
-струм в обмотці збудження LEM, А;
-швидкість електродвигуна, об/хв;
-швидкість веденого вала, об/хв;
-напруга, що подається на електричне гальмо, В;
-струм в колі електричного гальма, А,
-втрати неробочого ходу,Вт.
6.3Результати внести в таблицю 6.1.
70