

Електропостачання
.pdfМеханічні характеристики ω = f(Мв) подані на рис.1.1
ω
Рисунок 1.1 – Механічні характеристики двигуна при різних кутах відкриття тиристора
2 ПРОГРАМА РОБОТИ
2.1 Ознайомитись з паспортними даними електричних машин і апаратів, що входять в експериментальну установку.
2.2 Зібрати і налагодити схему установки.
2.3 Зняти характеристики двигуна постійного струму Uя f , f Ія тиристорного електропривода при різних кутах .
2.4Побудувати механічну характеристику f Mв
при різних кутах в одних системах координат.
2.5Проаналізувати отримані результати.
3 ОПИС СХЕМИ УСТАНОВКИ
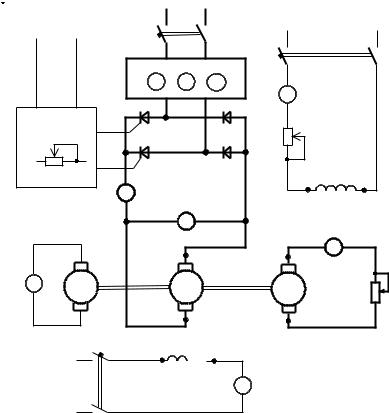
Принципова схема управління приводом системи ТП-Д подана на рис.1.2.
Схема складається з дослідного двигуна М1, на валу якого знаходиться генератор навантаження М2 і тахогенератор М3.
Змінна напруга подається за допомогою автоматичного вимикача QF2 на комплект К5О5, де параметри змінного струму вимірюються амперметром РА, вольтметром PV, та ватметром PW.
Якірне коло двигуна М1 живиться через діоднотиристорний міст (випрямляч), зібраний на двох діодах VD1 і VD2 та двох тиристорах VS1, VS2.
Для керування тиристорами VS1 і VS2 призначена система керування CK, до якої входить опір RR1 (магазин опорів). При зміні опору RR1 можна змінювати кут відкриття тиристора від 0о до 90о, що дає змогу регулювати напругу на якорі двигуна М1 від 10 до 220В.
Вимірювання струму і напруги якірного кола двигуна здійснюється амперметром РА1 і вольтметром PV1.
Обмотки збудження двигуна LM1 і генератора навантаження LM2 отримують живлення від мережі постійного струму 220В (автоматичний вимикач QF1).
Навантаження двигуна забезпечує генератор навантаження М2 з резистором RRН. Контроль за навантаженням здійснюється за допомогою амперметра РА2.
Струм в обмотці збудження генератора навантаження регулюється резистором RRГ і контролюється амперметром РА3.
4ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1Зібрати схему рис.1.2
4.2Перевірити схеми з керівником робіт.
4.3Опори RRН і RRГ повністю ввести.
4.4Встановити опір RR1 в положення, при якому кут відкриття тиристора мінімальний.
|
|
|
|
~ 220 |
|
|
|
|
|
~220 |
|
QF2 |
|
|
= 220 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QF1 |
|
|
|
|
|
|
K - 505 |
|
|
|
|
|
|
|
PA |
PV |
PW |
|
|
|
|
|
|
|
|
|
PA3 |
|
|
|
|
|
VS1 |
|
VD1 |
|
|
|
|
CK |
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VS2 |
~ |
VD2 |
RRГ |
|
|
|
|
+ |
|
|
|
|
|
|
RR1 |
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PA1 |
|
|
Ш1 LM2 |
Ш2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PV1 |
|
|
|
|
|
|
|
|
|
|
PA2 |
|
|
|
|
|
|
Я1 |
|
Я1 |
|
P |
об/ |
|
|
|
|
|
|
RRН |
|
хв |
|
|
|
|
|
|
|
|
|
|
M3 |
M1 |
|
M2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Я2 |
|
Я2 |
|
|
|
|
QF1 |
Ш1 |
LM1 |
Ш2 |
|
|
|
|
|
|
|
|
|
||
|
|
= 220 |
|
|
|
PA4 |
|
|
|
|
Рисунок 1.2 – Принципова схема управління |
||||||
|
|
|
електроприводом системи ТП-Д |
|
||||
4.5Увімкнути автоматичний вимикач QF1, перевірити наявність струму в обмотках збудження LM1 і LM2 за амперметрами PA3 і PA4.
4.6Увімкнути автоматичний вимикач QF2. Перевірити
вольтметром PV напругу змінного струму.Дослідження швидкісних характеристик при різних кутах відкриття тиристора
4.7Встановити магазином опорів RR1 мінімальний кут відкриття тиристора, який відповідає максимальній напрузі, визначеній вольтметром PV1.
4.8За допомогою RRН і RRГ змінювати навантаження двигуна від 0 до Iном
4.9Зняти 3-5 точок і занести покази приладів PА1,PV1, ~PW,~PA,~PV та тахометра в таблицю 1.1
4.10Ввести резистори RRН і RRГ, тобто зняти навантаження.
4.11Встановити резистором RR1 нове значення кута а і проводити дослідження згідно з п. 4.8, 4.9.
4.12По закінченню роботи вимкнути автоматичні вимикачі, спочатку QF2, потім QF1.
4.13Побудувати механічні характеристики при різних
кутах відкриття |
тиристора в одних системах |
координат, |
f (Мв) за даними розрахунків. |
|
|
5 |
РОЗРАХУНКОВІ ФОРМУЛИ |
|
Розрахувати енергетичні показники установки. |
||
Потужність на валу: |
|
|
Рв Р1 Р , Вт, |
(1.4) |
|
де Р1 – підведена електромагнітна потужність: |
|
|
Р1 = UяІя, Вт; |
(1.5) |
|
P - втрати потужності: |
|
|
P Pм Рщ Р , Вт, |
(1.6) |
|
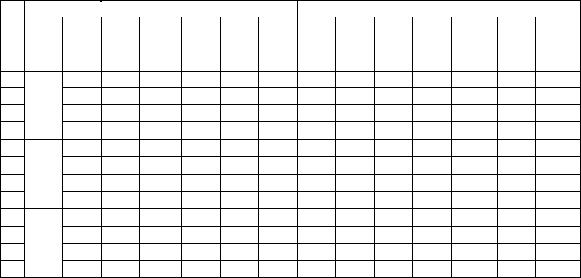
№ |
|
|
Результати дослідів |
|
|
|
Результати розрахунків |
|
|||||||
R |
I |
U |
|
U~ |
I~ |
P~ |
P |
P |
P |
P |
cos |
|
M |
||
|
|||||||||||||||
|
кОм |
А |
В |
об/хв |
В |
А |
Вт |
Вт |
Вт |
Вт |
Вт |
|
% |
кГ*м |
|
1
2
3
4
5
6
7
8
9
10
11
12

де Рм Ія2 Rя - втрати потужності в міді обмотки якоря |
||||||||||
двигуна М1,Вт; |
|
|
|
|
|
|
|
|
||
Rя 0.5(1 н) Uн , Ом |
|
|
|
|
(1.7) |
|||||
|
|
|
|
Ін |
|
|
|
|
|
|
Втрати потужності в щітковому контакті: |
|
|
||||||||
Рщ 2 Uщ я |
|
|
|
|
|
(1.8) |
||||
( Uщ прийняти рівним 1В). |
|
|
|
|
|
|
||||
Р |
– |
потужність |
втрат |
неробочого |
ходу |
двигуна, |
||||
визначається за нижче наведеним графіком (рис. 1.3). |
||||||||||
|
Ро, Вт |
Втрати холостого ходу - Ро |
|
|
|
|||||
|
|
Ро = f( |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
400 |
|
|
|
|
|
|
|
|
400 |
|
350 |
|
|
|
|
|
|
340 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
275 |
|
|
|
|
250 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
227 |
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
Ро, |
150 |
|
|
|
|
175 |
|
|
|
|
Вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
125 |
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
|
|
50 |
35 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
500 |
1000 |
1500 |
2000 |
2500 |
3000 |
3500 |
|
4000 |
|
|
|
|
|
|
об/хв |
|
|
, об/хв |
|
Рисунок 1.3 – Залежність втрат неробочого ходу від |
||||||||||
|
|
|
швидкості електродвигуна |
|
|
|
||||
Момент на валу двигуна: |
|
|
|
|
|
|||
Mв 975 |
Рв |
, кГм, |
|
|
|
|
(1.9) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
де Рв – кВт, ω – об/хв. |
|
|
|
|
|
|||
|
|
|
|
Рв |
|
|
|
|
ККД тиристорного приводу |
Р1 |
|
(1.7) |
|||||
|
|
|||||||
|
|
|
|
|
|
|||
Коефіцієнт потужності приводу cos |
Р1 |
(1.8) |
||||||
|
||||||||
~ U ~ I |
||||||||
|
|
|
|
|
|
|
||
|
6 РОЗРАХУНКИ НА ЕОМ |
|
||||||
6.1 За результатами лабораторних дослідів здійснити розрахунки механічних характеристик дослідного двигуна на ЕОМ за розрахунковими формулами в системі MATH-CAD.
6.2 Ввести результати досліджень з таблиці 1.1: - кількість дослідів (різних кутів ); - кількість точок в кожному досліді;
- струм в якірному колі для кожної точки, А; - напруга на якорі для кожної точки, В; - швидкість обертання, об/хв.; - значення струму (змінна напруга), А; - значення змінної напруги, В; - значення потужності, Вт.
- втрати неробочого ходу, Вт. 6.3 Результати занести в таблицю 1.1.
6.4 За результатами розрахунків побудувати механічні
характеристики дослідного двигуна в одних координатах для
.
7ЗМІСТ ЗВІТУ
Узвіті необхідно подати:
7.1Схему експериментальної установки.
7.2Паспортні дані машин і приладів.
7.3Таблиці з експериментальними і розрахунковими
даними.
7.4Графіки експериментально знятих і розрахованих характеристик. Характеристики побудувати на міліметровому папері.
8КОНТРОЛЬНІ ЗАПИТАННЯ
8.1Поясніть принцип дії тиристорного перетворювача.
8.2Яким чином досягається жорсткість механічних характеристик двигуна тиристорного електроприводу?
8.3Чим регулюється середня випрямлена напруга в ТП?
8.4В якому діапазоні можна змінювати кут відкриття тиристора?
8.5Поясніть призначення елементів схеми рис.1.2
ЛАБОРАТОРНА РОБОТА № 2
ДОСЛІДЖЕННЯ МЕХАНІЧНИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГУНА З ФАЗНИМ РОТОРОМ
Мета роботи: Дослідження механічних характеристик асинхронного двигуна з фазним ротором в робочому і гальмівних режимах.
1 ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
Механічна характеристика асинхронного двигуна (АД) являє собою залежність ω=f(М) або М=f(S) зміни швидкості обертання ротора від величини моменту М на валу (або моменту на валу від ковзання). Момент двигуна, виражений через параметри схеми заміщення і ковзання, визначається за формулою
|
|
|
|
|
|
|
|
|
|
2 |
r ' |
|
|
|
|
|
|
|
|
|
|
m1U Ф |
2 |
|
|
|
|
|
|||||
M |
|
|
S |
|
|
|
, |
(2.1) |
||||||||
|
|
|
|
|
' |
|
2 |
|
|
2 |
||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
||||
|
|
9,81 |
|
|
2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||||||||
|
|
|
0 |
|
r1 |
|
S |
|
|
|
x1 x2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де m1 – число фаз статора; Uф – фазна напруга статора; |
S |
|||||||||||||||
– ковзання ротора: |
|
|
|
|
|
|
|
|
|
|
|
|||||
S |
0 1 |
, |
|
|
|
|
|
|
|
|
|
|
(2.2) |
|||
|
0 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де ω0 – швидкість магнітного поля статора (синхронна |
||||||||||||||||
швидкість), об/хв; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
60 f |
1 |
, об/хв, |
|
|
|
|
|
|
|
(2.3) |
||||
|
|
|
|
|
|
|
|
|||||||||
p |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де f1 – частота струму мережі живлення, Гц; p – число пар полюсів; ω1 – швидкість обертання ротора, об/хв;

r1 і х1 – активний і індуктивний опори обмоток статора, Ом;
r2′ і х2′ – активний і індуктивний опори ротора, зведені до обмотки статора, Ом.
Найбільшу жорсткість має природна механічна характеристика АД. При введенні додаткового опору в коло ротора жорсткість механічної характеристики зменшується, тому робота АД при великому RД в колі ротора небажана.
Для практичних розрахунків механічної характеристики широко використовується спрощене рівняння механічної характеристики (рівняння Клосса)
M |
|
2M KP |
|
|
|||
|
S |
|
SKP , |
(2.4) |
|||
|
|
||||||
|
|
SKP |
S |
|
|
||
де МКР – критичний момент двигуна, Нм;
МКР=λМНОМ,
де λ – коефіцієнт перевантаження; МНОМ – номінальний момент, Нм.
Критичне ковзання визначається за формулою:
|
|
|
|
SКР SНОМ ( 2 1) , |
(2.5) |
||
де SHOM – номінальне ковзання.
Номінальний момент може бути визначений за паспортними даними електродвигуна:
M НОМ |
975 PНОМ , кГм, |
(2.6) |
|
НОМ |
|
де РНОМ – номінальна потужність електродвигуна, кВт; |
ωНОМ |
|