

Електропостачання
.pdf
|
|
= 220 |
|
||
QF2 |
|
|
|
|
|
|
LM1 |
|
PA1 |
RR3 |
|
Ш1 |
Ш2 |
|
|
||
|
|
|
PV1 |
|
|
|
|
|
|
|
KМ |
|
|
|
|
RR2 |
RR1 |
1 |
|
|
1 |
RRд |
|
|
|
|
0 |
||
SA |
0 |
|
|
|
|
|
|
|
|
||
2 |
RRг |
2 |
|
|
|
|
|
|
PA2 |
||
|
|
|
|
|
|
|
|
|
PV2 |
|
|
|
|
|
|
M1 |
|
|
Я1 |
|
|
Я2 |
|
|
|
|
|
M2 |
|
|
|
|
P |
|
|
|
|
|
об/ |
|
|
|
|
|
хв |
|
|
QF1 |
SBT |
SBC |
KМ |
||
|
|
|
KМ |
|
|
~ 220 |
|
|
|
|
|
Рисунок 4.1 – Принципова схема досліджень перехідних процесів при пуску і гальмуванні електричного двигуна постійного струму
ЛАБОРАТОРНА РОБОТА № 5
ДОСЛІДЖЕННЯ ЕЛЕКТРОПРИВОДУ ВЕНТИЛЯТОРНОЇ УСТАНОВКИ І ВИБІР ПОТУЖНОСТІ ЕЛЕКТРОДВИГУНА
Мета роботи: дослідження режимів роботи
електродвигуна вентиляторної |
установки і вибір його |
потужності. |
|
1 ОСНОВНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
Вентилятори, які використовують на промислових підприємствах, приводяться в рух, як правило, від найбільш простих і надійних в експлуатації трифазних асинхронних електродвигунів з короткозамкненим ротором і працюють в тривалому режимі з постійним навантаженням.
Для забезпечення однакової швидкості вала вентилятора і вала ротора привідного електродвигуна їх здійснють за допомогю муфти. Якщо ці швидкості повинні відрізнятися, вал електродвигуна і вал вертилятора зєднуються за допомогю механічної передачі.
Для експериментального визначення потужності електродвигуна, який буде забезпечувати нормальну роботу вентилятора, потужність його повинна бути достатньою для обертання вентилятора з номінальною швидкістю при відкритій заслонці повітреводу.
Змінюючи потужність Р1 , яку споживає електродвигун
з мережі, і вираховуючи втрати Р , що мають місце в самому електродвигуні, знаходимо потужність Р2 на його валу
Р2 = Р1 - Р , кВт |
(5.1) |
Вентиляторна установка працює у режимі постійного навантаженя, тому потужність привідного електродвигуна можна вважати рівною Р2. Оскільки в каталогах електричних машин не завжди є електродвигуни з потужністю, що отримана експерементально, то вибирається електродвигун найближчої
більшої потужності.
Таким чином, потужність електродвигуна РД для приводу вентилятора повинна бути
РД Р2. |
(5.2) |
Вимірювання потужності Р1, яка споживається асинхронним електродвигуном, здійснюється за показами
приладів. Експериментальне визначення втрат Р є складною задачею, тому їх визначають розрахункови методом.
Як відомо, втрати в асинхронному електродвигуні розділяють на: механічні, магнітні, електричні і додаткові.
Механічні втрати - втрати на тертя валу в підшипниках, поверхні ротора повітряним проміжком, щіток контактні кільця, а також магнітні втрати на перемагнічування і вихрові струми в сталі статора. Їх часто об'єднують в втрати холостого ходу ∆Р0, які визначаються
∆Р0 = Р10 + ∆Рм1 , |
(5.3) |
де ∆Р10 – втрати потужністі, при неробочому ході;
∆Рм1 – втрат потужністі на нагрів обмоток статора при неробочому ході.
Електричні втрати, які мають місце в обмотках статора і ротора, характеризуються потужністю, що витрачається на нагрівання провідників, по яких протікає електричний струм.
При з’єднанні обмоток статора зіркою електричні втрати рівні
P |
3 І2 |
r , |
(5.4) |
М1 |
1 |
1 |
|
де I1 – фазний струм в обмотках статора електродвигуна, А; r1- активний опір одної фази обмотки статора, Ом.
У випадку з’єднаня обмоток статора трикутником,
формула (5.4) має вигляд: |
|
|
|
|
Р |
М1 |
І2 |
r , |
(5.5) |
|
1 |
1 |
|
|
оскільки при даному типі з’єднання струм, що протікає по
даній обмотці статора, буде в 
 3 рази менший за струм в
3 рази менший за струм в
проводах лінії, що підходять до електродвигуна.
Величина активного опору r1 обмотки статора визначається із співвідношення:
r1 КГ |
r |
, |
(5.6) |
|
10 |
|
|
де КГ - коефіцієнт, який враховує явище поверхневого ефекту і приймається рівним 1,05 – 1,15 для обмоток статора, виконаних відносно тонким приводом;
r10 - омічний опір однієї фази статора, який визначається методом амперметра і вольтметра.
Електричні втрати в обмотках ротора з фазни ротором, які з’єднані зіркою, визначаються
P |
3І2 r , |
(5.7) |
М 2 |
2 2 |
|
де I2 – фазний струм в обмотці ротора, А;
r2 - активний опір одної фази обмотки ротора, який прирівнюється омічному опору r20 внаслідок малої частоти струмів в роторі, Ом.
Вимірювання величин r10 і r20 бажано проводити для нагрітого стану машини, що встановився.
Електричні втрати в роторі з короткозамкненою
обмоткою наближено визначаються співвідношенням |
|
|||||
РМ 2 |
S |
Р |
2 |
, |
(5.8) |
|
(1- S) |
||||||
|
|
|
|
|||
де S - ковзання.
Додаткові втрати Рдод приймаються 0.5% від номінальної
потужності електродвигуна, тобто |
|
∆Рдод = 0,005 Рном , |
(5.9) |
де Рном – потужність, яка вказується в паспорті двигуна. |
|
Таким чином, сумарні втрати в асинхронному
електродвигуні |
|
|
|
|
Р = Р0 + Рм1 + Рм2 + Рдод , |
(5.10) |
|||
або, враховуючи попередні співвідношення |
|
|||
Р Р РМ 1 S |
Р2 |
PДОД |
(5.11) |
|
(1 - S) |
||||
|
|
|
||
Підставивши (5.11) у (5.1) отримуємо потужність на валу |
||||
електродвигуна: |
|
|
|
|
Р2 |
P P |
P |
P |
|
|
1 0 |
M 1 |
дод |
(5.12) |
||
|
1 S |
|
|
||
|
|
|
|
|
|
Величина ковзання визначається із співвідношення |
|
||||
|
S 1 2 , |
|
|
(5.13) |
|
|
|
1 |
|
|
|
де 1 = 60 f / p – синхронна швидкість, (p – кількість пар полюсів; f – частота мережі живлення 50 Гц).
2 - швидкість ротора, виміряна тахометром. |
|
||
Після визначення потужності Р2, знаходиться |
коефіцієнт |
||
завантаження 1 електродвигуна |
|
||
1 |
Р2 |
100%, |
(5.14) |
|
|||
|
РНОМ |
|
|
де РНОМ – номінальна потужність встановленого електродвигуна.
Якщо величина коефіцієнта завантаження 1 виявиться до 45%, то встановлений електродвигун, що працює з незмінними
значеннями коефіцієнта потужності (сos ) і ККД ( ) (рис.5.1)
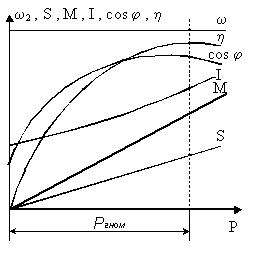
потрібно замінити на електродвигун меншої потужності.
При 1>70% електродвигун потрібно залишити. Якщо ж
коефіцієнт завантаження 1 буде в межах 45%< 1<70%, то питання доцільності заміни його може бути вирішене тільки шляхом розрахунку, причому перевага віддається тому електродвигуну, при якому втрати активної потужності в системі менше.
Рисунок 5.1 – Робочі характеристики асинхронного двигуна
В окремому випадку, заміна електродвигуна іншим меншої потужності завжди себе оправдовує, якщо має місце зменшення активної потужності в самому електродвигуні, тобто коли
Р |
Р |
2 1 |
0, |
(5.15) |
|
д |
2 |
|
|
|
|
|
|
2 |
1 |
|
|
де Р2 – потужність на валу електродвигуна привода вентилятора;
1, 2 – значення ККД, встановленого і вибраного електродвигунів при відповідних коефіцієнтах завантаження, що
знаходяться за формулою (5.14).
Числові значення ККД ( 1 і 2) знаходяться за кривими 1
= f( 1), 2 = f( 2), котрі будуються за даними каталогів електричних машин.
Якщо величина РД < 0, то для кінцевого вирішення питання про заміну електродвигуна необхідно знайти загальні втрати активної потужності в системі за формулою:
РС = Рд + Ке ( Q1 – Q2 ) |
|
(5.16) |
Якщо величина РС > 0, то заміна електродвигуна на |
||
меншу потужность доцільна, і при |
РС |
0 – заміна |
електродвигуна недоцільна.
Величини Q1 і Q2 – це реактивні потужності відповідно встановленого і вибраного електродвигунів при коефіцієнтах
навантаження 1 і 2, а коефіцієнт Ке є економічним еквівалентом реактивної потужності, котрий при коефіцієнті
потужності електроприймача cos = 0,75 0,90 приймається
відповідно Ке = 0,08 0,06.
Числові значення Q1 і Q2 знаходяться із співідношення
|
|
|
tq |
номi |
|
|
|
|
Q Q |
1 |
2 |
|
|
1 |
, |
(5.17) |
|
|
|
|||||||
i |
Xi |
i |
|
mi |
|
|
|
|
|
|
|
|
|
|
|
||
де QХі – реактивна потужність, яка використовується електродвигуном при неробочому ході;
tq номі – знаходиться за номінальним коефіцієнтом потужності електродвигуна;
ті – коефіцієнт, який залежить від cos номі (рис.5.2).
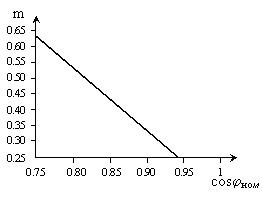
Рисунок 5.2 – Залежність коефіцієнта т від
номінального коефіцієнта потужності cos ном
асинхронного електродвигуна
З достатньою для практики точністю Qі можна
визначити за формулою |
|
Qi iQXi , |
(5.18) |
де і = f ( i ) і знаходиться за графіком (рис.5.3).
Реактивна потужність QХі, яка використовується електродвигуном в режимі холостого ходу, знаходиться із
співвідношення |
|
|
|
|
|
Q |
|
PHОМi |
Т |
, |
(5.19) |
|
|||||
xi |
|
|
і |
|
|
|
|
HОМi |
|
|
|
де Рномі і номі - відповідно номінальні значення потужності і ККД встановленого і вибраного електродвигунів.
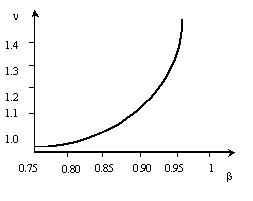
Рисунок 5.3 – Залежність коефіцієнта від коефіцієнта
завантаження асинхронного електродвигуна
2 ПРОГРАМА РОБОТИ
2.1Ознайомитися з режимом роботи електродвигуна привода вентилятора.
2.2Визначити потужність на валу електродвигуна методом розділення втрат.
2.3Знайти потужність електродвигуна для приводу вентилятора.
2.4Вибрати за каталогом електродвигун для приводу вентилятора і визначити доцільність заміни ним встановленого електродвигуна.
3 ОПИС СХЕМИ УСТАНОВКИ
Установка, для дослідження привода вентилятора і експериментального визначення потужності його двигуна (рис.5.4) складається з трифазного асинхронного електродвигуна з короткозамкненим ротором М1 , який приводить в рух відцентровий вентилятор. На одному валу з двигуном М1 знаходиться тахогенератор М2 з тахометром Рω для вимірювання швидкості.
Увімкнення схеми здійснюється з допомогою автоматичного вимикачів QF1 і QF2.
Для вимірювання лінійної напруги U , струму в фазах І, а також споживаної потужності Р1 в колі статора передбачений
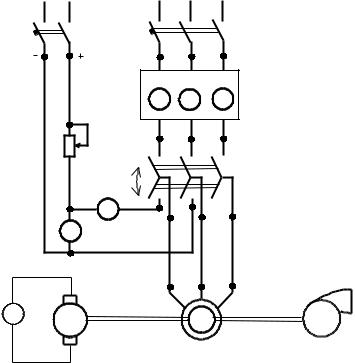
вимірювальний комплект К505. |
|
|
|
Триполюсний перемикач SA дозволяє підводити до |
|||
обмоток статора трифазний струм або приєднати їх до |
|||
постійного струму, де методом амперметра і вольтметра |
|||
визначається омічний опір обмотки. |
|
|
|
Струм регулюється резистором RR1 і контролюється |
|||
амперметром РА0. напруга вимірюється вольтметром PV0. |
|||
= 110 |
~3 х 220 |
|
|
QF2 |
QF1 |
|
|
|
PA PV |
PW |
Вимірювальний |
|
|
|
комплект К-505 |
|
RR1 |
|
|
|
Д |
|
|
|
PA0 |
|
SA |
|
|
|
|
|
Г |
|
|
|
C1 |
C2 |
C3 |
|
0 |
|
|
|
PV |
|
|
|
C1 |
C2 |
C3 |
P об/ |
|
|
|
хв |
|
|
|
|
M2 |
M1 |
|
|
|
|
|
|
|
|
Вентилятор |
Рисунок 5.4 – Принципова схема дослідження |
|||
електроприводу вентиляторної установки |
|||