

Начертательная геометрия
.pdfВывод: При замене П1П2 на П1П4 неизменными являются горизонтальная
проекция точки и ее высота, аналогично, при замене П1П2 на П2П5 неизменными являются фронтальная проекция точки и ее глубина.
Задача 1. Прямую общего положения преобразовать в прямую уровня
Рис. 9.3
Алгоритм решения задачи (рис. 9.3): П1П2 П1П4, П4 П1, П4 AB, x1 A1B1; A1AX1 x1, B1BX1 x1; |AX1A4| = |AXA2| = zA, |BX1B4| = |BXB2| = zB; |A4B4| = |AB|.
= AB^ П1.
Пр и м е ч а н и е . Исходные данные задачи ( [АВ] не перпендикулярен и не
параллелен основным плоскостям проекций П1 и П2) не регламентируют обязательное построение дополнительной плоскости П4 П1. Натуральную величину [АВ] можно определить вводя дополнительную плоскость и П2, но в этом случае определяется угол = АВ^П2 .
Задача 2. Прямую уровня преобразовать в проецирующую прямую
Рис. 9.4
Тема 9
100
Алгоритм решения задачи (рис. 9.4): П1П2 П2П4, |
П4 П2, П4 AB, x1 A2B2; |
|AX1A4| = |BX1B4| |
= |AXA1| = |BXB1| = yA = yB. |
П р и м е ч а н и е . Плоскость П4 вводится только П2, так как прямая f П2. Если ввести плоскость П4 П1, то невозможно достичь результата, требуемого условием задачи.
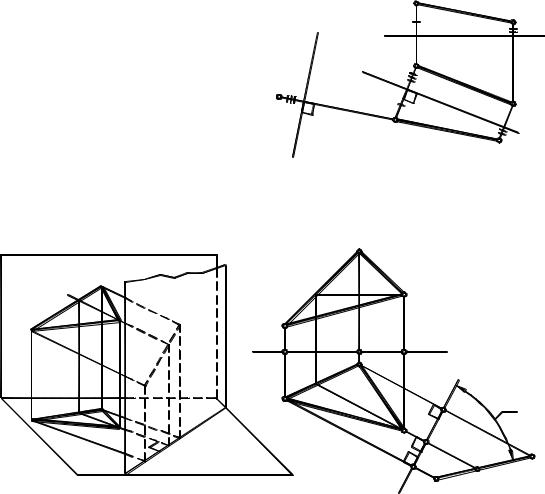
Прямую общего положения преобразовать в проецирующую прямую
Алгоритм решения задачи (рис.9.5):
П4 AB, x1 A1B1; П5 AB, x2 A4B4.
Т.о. последовательно решены 1 и 2 задачи преобразования чертежа.
Рис. 9.5
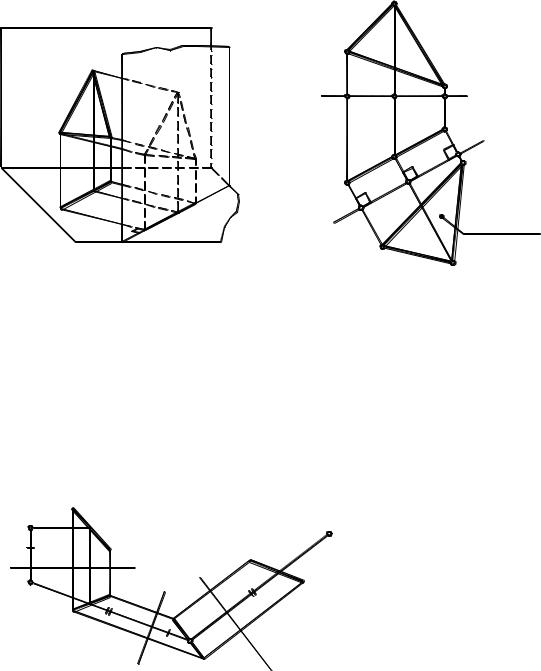
Задача 3. Плоскость общего положения преобразовать в проецирующую плоскость
|
П 2 |
|
B |
|
|
|
|
|
|
|
|
|
|
h |
|
П 4 |
|
|
A |
|
C |
B4 |
|
|
|
|
|
|
|
|
|
|
|
C4 =h4 |
|
x |
|
|
|
A4 |
x1 |
A1 |
h1 |
B1 |
|
||
|
|
|
|||
|
|
|
C1 |
B |
|
|
|
|
|
x1 |
|
|
|
|
|
Cx1 |
П 1 |
|
|
|
|
Ax1 |
Рис. 9.6
Алгоритм решения задачи (рис. 9.6): П1П2 П1П4, П4 П1, П4 ( АВС), П4 h ; x1 h1, |AX1A4| = |AXA2|, |BX1B4| = |BXB2|, |CX1C4| = |CXC2|. = x1^A4C4B4 = ^ П1 .
П р и м е ч а н и е . Эта задача решается как промежуточный этап в нахождении Н.В. плоскости, если последняя занимает в пространстве общее положение, или при определении углов наклона данной плоскости к плоскостям проекций.
Если необходимо определить угол наклона плоскости к плоскости П2 , то дополнительную плоскость П4 надо вводить П2 , и тогда алгоритм решения задачи
будет: П4 f , х1 f2; |AX1A4 | = |AXA1|, |BX1B4 | = |BXB1|, |CX1C4| = |CXC1| .= x1^ C4A4B4 = ^ П2 .
Тема 9
101
Задача 4. Проецирующую плоскость преобразовать в плоскость уровня
|
П 2 |
|
|
B |
П 4 |
|
|
B4 |
|
A |
C |
|
|
C4 |
x |
C1 |
A4 |
|
x1 |
|
|
B1 |
|
|
A1 |
Cx1 |
|
П 1 |
Bx1 |
|
Ax1 |
Рис. 9.7
Алгоритм решения задачи (рис. 9.7): П1П2 П1П4, П4 П1, П4 ( АВС);
x1 А1В1С1, |AX1A4| = |AXA2|, |BX1B4| = |BXB2|, |CX1C4| = |CXC2| .A4B4C4 - натуральная величина АВС.
П р и м е ч а н и е . Так как плоскость ( АВС) - горизонтально-проецирующая, то только на плоскости П4, перпендикулярной П1 и параллельной плоскости , можно получить натуральную величину плоскости, заданной треугольником.
Преобразовать плоскость общего положения в плоскость уровня
Алгоритм решения задачи (рис. 9.8): П4 (А, ВС);
x1 h1 (А1, В1С1);
П5 (А, ВС); x2 (А4, В4С4);
A5, B5C5 - Н.В. (A, BC).
Рис. 9.8
9.2.Способ вращения
9.2.1.Основы способа вращения. Аппарат вращения
Особенностью способа вращения является то, что оставляя неизменной основную систему плоскостей проекций, г.о. переводят из общего положения в частное путем его вращения.
Тема 9
102
RA
A


Рис. 9.9
i |
|
|
Аппарат вращения (рис. 9.9): |
|
|
|
А – объект вращения, |
0 |
m |
|
i – ось вращения, |
|
|
– плоскость вращения, |
|
|
|
|
|
|
|
|
O = i (центр вращения), |
|
|
RA = OA (радиус вращения), |
|
|
|
|
|
|
|
|
m – траектория вращения точки A. |
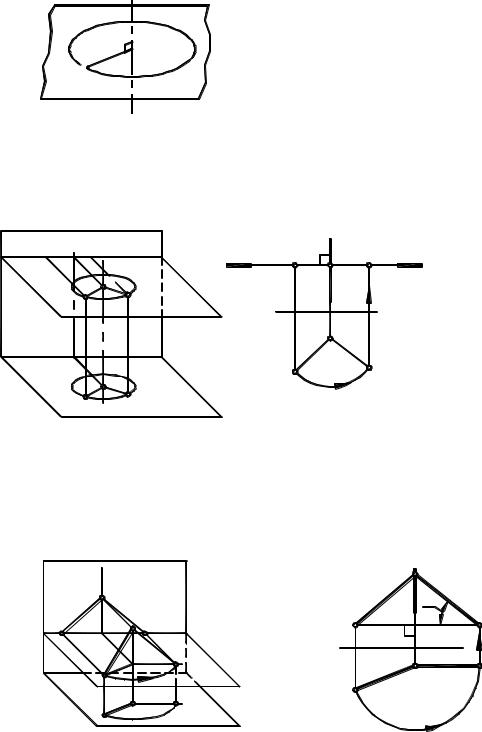
9.2.2. Вращение вокруг проецирующих прямых
На рис. 9.10 показано вращение точки А относительно оси i, перпендикулярной горизонтальной плоскости проекций.
Рис. 9.10 |
i П1,i,
П1, A1A'1 - дуга
окружности m,
A2A'2 x.
При вращении точки вокруг проецирующей прямой одна проекция вращаемой точки перемещается по окружности радиуса, равного расстоянию от этой точки до оси вращения, вторая – по прямой, перпендикулярной оси вращения (рис. 9.10).
Задача 1. Прямую общего положения повернуть до положения прямой уровня
|
i2 |
|
|
П 2 |
|
|
|
|
B2=B'2 |
|
|
|
|
A2 |
B' =B |
A2' |
|
|
|
|
|
A |
i |
|
A' |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B = i =B' |
|
|||
|
|
|
|
|||
|
A1 |
1 |
1 |
1 |
|
|
|
|
|
A1' |
П 1 |
|
|
|
|
|
|
Рис. 9.11 |
||
|
|
|
|
|
|
|
Алгоритм решения задачи (рис. 9.11):
В i П1; B'1A'1 x, [B'1A'1] = [B1A1]; |B'2A'2| = |AB|. = AB^П1.
П р и м е ч а н и е . [АВ] на рис. 9.11 занимает общее положение в пространстве. Для определения натуральной величины [АВ] можно вращать его до положения прямой уровня - фронтали (см. рис. 9.11, справа), но и - горизонтали, если ось i взять П2. При этом определится угол = АВ ^ П2 .
Тема 9
103

Задача 2. Прямую уровня повернуть до положения проецирующей прямой
A' |
|
П 2 |
|
|
2 |
|
|
|
|
A2 |
|
|
|
|
|
|
A' |
|
|
|
|
|
|
|
B2=i2= B2' |
|
|
||
A |
|
|
|
|
x |
|
|
|
|
|
|
B=B' |
|
|
|
|
i |
|
|
A1 |
B =B' =A' |
П 1 |
||
|
1 |
1 |
1 |
|
Рис. 9.12
Алгоритм решения задачи (рис. 9.12):
Вi П2; A'2B'2 x, A'1 = B'1.
Пр и м е ч а н и е . По условию задачи [АВ] = f, повернуть его до положения
проецирующего можно только вокруг оси, перпендикулярной плоскости П 2. Если бы была задана горизонталь, то преобразовать её в проецирующую прямую можно вращая относительно оси, перпендикулярной плоскости П1 .
Задача 3. Плоскость общего положения повернуть до положения проецирующей плоскости
|
|
C2 |
i2 |
C2' |
П 2 |
|
|
|
|
||
|
|
12 h2 |
|
B2= B'2=1'2 = h'2 |
|
|
|
|
|
||
|
|
A' |
|
|
|
|
A2 |
2 |
C |
|
C1' |
|
|
B=B' |
|||
|
|
|
|||
|
|
|
h |
1 |
|
|
|
1 |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
h'1 |
11' |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
П 1 |
A' |
||
|
|
|
1 |
||
|
|
|
|
|
|
Рис. 9.13
Алгоритм решения задачи (рис. 9.13): B i П1; h ( АВС); h' П2, h'1 x,А'1В'1С'1 А1В1С1. А'2 В'2 С'2 - след плоскости . = ^ П1.
П р и м е ч а н и е . Заданную пло скость можно повернуть до положения проецирующей и вращая относительно оси i П2. В плоскости надо задать фронталь и вращать её до положения, перпендикулярного плоскости П1. Исходная плоскость станет горизонтально-проецирующей и определится угол наклона её к
плоскости П2.
Тема 9
104

Задача 4. Проецирующую плоскость повернуть до положения плоскости уровня
П 2 |
B2 |
C2
C
B2'  C2'
C2' 
 A2=i2=
A2=i2= A2'
A2' 
 B
B
x C1'
B' |
A=A' 1 |
1 |
i |
П 1 |
|
|
|
Рис. 9.14 |
Алгоритм решения задачи (рис. 9.14): A i П2 ; А'2 С'2 В'2 x, А'1С'1В'1 - Н.В. АВС.
П р и м е ч а н и е . Исходя из условия задачи (плоскость П2) вращать её до положения уровня можно только вокруг оси i П2.
Вывод: При вращении отрезка прямой или плоской фигуры вокруг оси,
перпендикулярной к плоскости проекций, проекция на эту плоскость не изменяется ни по виду, ни по величине – меняется лишь положение этой проекции относительно оси проекций. У другой проекции - на плоскости, параллельной оси вращения, все ее точки (за исключением проекций точек, расположенных на оси вращения) перемещаются по прямым, параллельным оси проекций, и проекция изменяется по форме и по величине.
9.2.3. Способ плоскопараллельного движения
Недостатком способа вращения вокруг оси, перпендикулярной плоскости проекций, является наложение проекций, избежать которое можно применив метод плоскопараллельного движения.
Движение фигуры в пространстве называется плоскопараллельным, если все ее точки перемещаются в параллельных плоскостях. Плоскопараллельное движение фигур рассматривают в данном случае относительно плоскостей проекций.
При плоскопараллельном движении фигуры относительно горизонтальной плоскости проекций фронтальные проекции ее точек перемещаются по прямым, перпендикулярным линиям связи, а горизонтальная проекция фигуры остается конгруэнтной самой себе.
При плоскопараллельном движении фигуры относительно П2 горизонтальные проекции ее точек перемещаются по прямым, перпендикулярным линиям связи, а фронтальная проекция фигуры остается конгруэнтной самой себе.
Тема 9
105
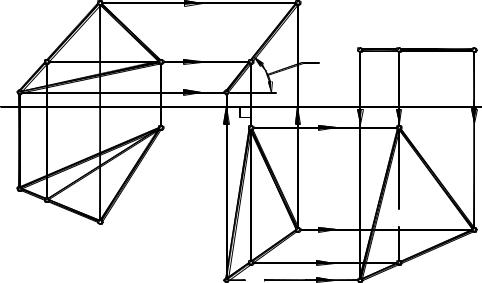
На рис. 9.15 определим натуральную величину АВС способом плоскопараллельного движения.
|
|
|
Рис. 9.15 |
|
|
|
|
|
|
|
|
|
|
|||
Алгоритм решения задачи (рис. 9.15): |
|
|
|
|
|
|
||||||||||
h ( АВС), h' x, А' В' С' |
А В С . А' С' В' ^ x = = ^ П . |
|||||||||||||||
|
|
|
1 |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
|
2 |
2 |
2 |
1 |
А'' С'' В'' x, А'' С'' В'' |
А' С' |
В' . А'' В'' С'' |
- Н.В. АВС. |
|
||||||||||||
2 |
2 |
2 |
2 |
2 |
2 |
|
2 |
2 |
2 |
1 |
1 |
1 |
|
|
|
|
П р и м е ч а н и е . На рис. 9.15 задан АВС, занимающий в пространстве общее положение. Для определения его натуральной величины необходимо последовательно решить две задачи (сначала сделать плоскость АВС проецирующей - 3 задача, а затем - плоскостью уровня, т.е. решить 4 задачу преобразования чертежа). Тот же результат можно получить, если в АВС задать фронталь и перемещать его плоскопараллельно сначала относительно фронтальной плоскости проекций, а затем - горизонтальной плоскости проекций.
Вопросы для самоконтроля и задачи для самостоятельной работы по теме "Способы преобразования чертежа"
9.1.Зачем необходимо преобразование чертежа?
9.2.В чем сущность способа замены плоскостей проекций?
9.3.Какие основные задачи решаются преобразованием чертежа?
9.4.Какова последовательность построения на чертеже новых проекций точек способом замены плоскостей проекций?
9.5.Как задать новую плоскость проекций, чтобы прямая общего положения стала прямой уровня ?
Тема 9
106
9.6. Как задать новую плоскость проекций, чтобы прямая уровня стала проецирующей прямой?
9.7.Сколько преобразований необходимо для приведения прямой общего положения в положение проецирующей прямой?
9.8.Как задать новую плоскость проекций, чтобы плоскость общего положения стала проецирующей плоскостью?
9.9.Как задать новую плоскость проекций, чтобы проецирующая плоскость стала плоскостью уровня?
9.10.Сколько преобразований необходимо для приведения плоскости общего положения в положение плоскости уровня?
9.11.Принципиальное отличие способа вращения от способа замены плоскостей проек-
ций.
9.12.Элементы аппарата вращения.
9.13.Как проецируется траектория движения точки при вращении вокруг оси: перпендикулярной плоскости П1 ; перпендикулярной плоскости П2 .
9.14.Где находится центр вращения и как определяется величина радиуса вращения точки вокруг оси, перпендикулярной плоскости проекций.
9.15.Какая проекция геометрического образа не меняет своей величины и формы
при плоскопараллельном перемещении относительно плоскости П1, относительно
плоскости П2? |
|
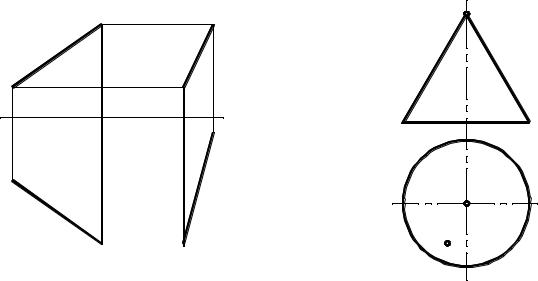
9.16. Найдите ось, вращаясь вокруг |
9.17. Вращением определите расстояние |
которой отрезок прямой перейдет |
между точками А и S, принадлежащими |
из положения АВ в положение А' В'. |
поверхности конуса. |
B2 |
|
B' |
S2 |
|
|
2 |
|
A2 |
|
|
|
|
A' |
|
|
|
2 |
|
|
x |
|
|
|
|
|
B' |
|
|
|
1 |
|
A1 |
|
|
S1 |
|
|
|
|
B |
A1' |
|
A1 |
1 |
|
|
|
Тема 9
107
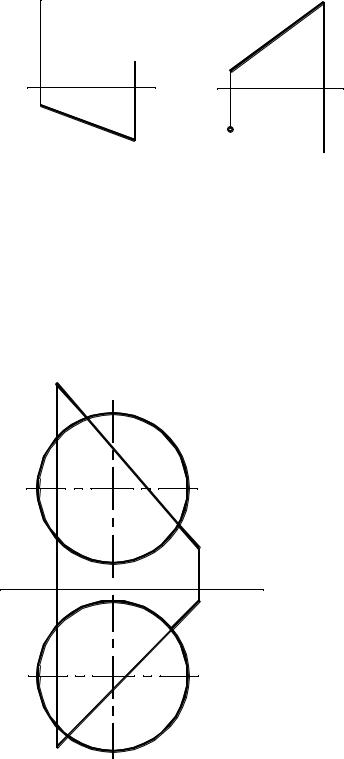
9.18. Достройте недостающую проекцию отрезка АВ прямой общего положения, если:
а) его натуральная величина равна 30 мм, |
б) угол наклона его к плоскости П2 ра- |
способом замены плоскостей проекций; |
вен 300, способом плоскопараллельного |
|
перемещения. |


 B2
B2
x A1
B1
B2 |
A2 |
x |
A1 |
9.19. Построить точки пересечения прямой с поверхностью сферы, применив способ введения дополнительной плоскости проекций.
l2
x П2
П1
l1
Тема 9
108
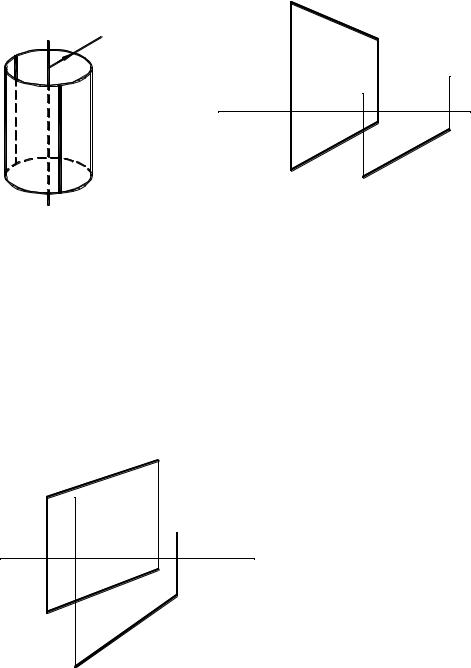
9.20. Построить фронтальную проекцию |
|
прямой b, параллельной а, если расстояние |
|
между ними равно 20 мм. |
a2 |
x П2
П1
a1 b1
Прямые b, b' - образующие цилиндра вращения, осью которого является прямая а. (Задача имеет два решения.)
9.21. Определить расстояние между скрещивающимися прямыми а и b.
a2
 b2
b2
x П 2
П 1
a1 b1
Тема 9
109