

Задание 25
Разработать план рациональных маршрутов перевозок по результатам решения заданий 23 и 24 с минимизацией порожних пробегов. Порядок решения такой задачи рассматриваем непосредственно на примере (табл. 57).
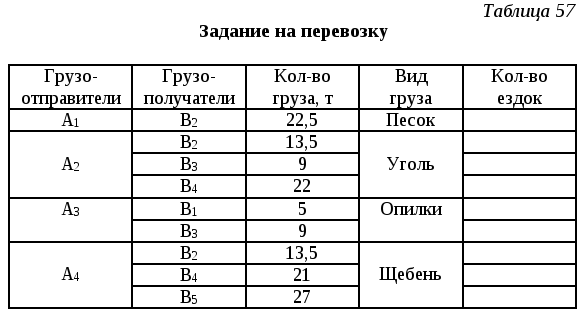
Оптимальный вариант перевозок можно получить, решая транспортную задачу на минимум холостых пробегов; удобнее это сделать через количество ездок, для чего вначале, выбрав необходимый подвижной состав, определяют количество ездок по каждому маршруту.
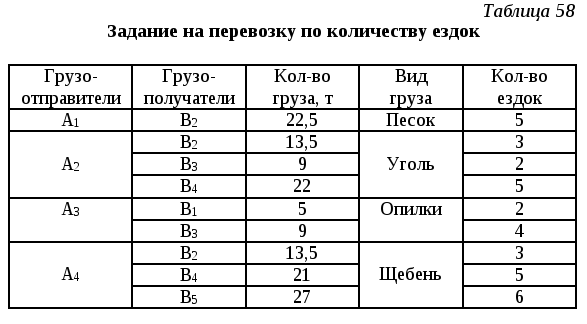
Например, располагая автомобилем-самосвалом ЗиЛ-4503 грузоподъемностью 4,5 т и учитывая значение коэффициента использования грузоподъемности для разных грузов (для опилок γ = 0,5, для остальных грузов γ = 1), задание на перевозки представим в виде табл. 58.
Для решения задач такого типа используют метод совмещенных матриц, который заключается в том, что вначале выявляют перевозки, которые целесообразно выполнять по маятниковым маршрутам, остальные объединяют в кольцевые.
По маятниковым маршрутам целесообразно выполнять такие перевозки, которые выполняются по оптимальному плану. Оптимальный план составляется для холостых ездок и в случаях, когда этот план совпадает с заданиями на перевозки, то такие задания выполняются по маятниковым маршрутам. В связи с этим составляют оптимальный план холостых ездок, на него накладывают план заданий на перевозки (план груженых ездок) и, если холостые и груженые ездки совпадают, то такие перевозки планируют по маятниковым маршрутам.
Чтобы получить оптимальный план холостых ездок грузополучателей считают поставщиками порожнего подвижного состава, а грузоотправителей – соответственно, получателями такого подвижного состава. Кроме того, под обозначениями грузоотправителей и грузополучателей указываются расстояния от них до АТП. Холостые ездки для отличия их от груженых обозначают числом в скобках. Результат решения транспортной задачи относительно холостых ездок представлен в табл. 59.

В эту же матрицу заносят груженые ездки, которые необходимо выполнить в соответствии с планом, составленным по заявкам грузовладельцев (см. табл. 58). Груженые ездки показаны курсивом (табл. 60).
Полученая матрица холостых и груженых ездок называется совмещенной (от нее и название метода); с помощью этой матрицы формируются маршруты движения подвижного состава.
Вначале выделяют маятниковые маршруты. Наличие в одной ячейке таблицы холостых и груженых ездок свидетельствует, что данную перевозку целесообразно выполнять по маятниковому маршруту. Количество ездок на маятниковых маршрутах соответствует меньшему из значений числа груженых и холостых ездок. В данном примере можно формировать маятниковые маршруты:
№ 1 А1В2– В2А1 – 5 ездок;
№ 2 А2 В 4– В4А2 – 5 ездок;
№ 3 А4 В5– В5А4 – 6 ездок.

Сформированные по маятниковым маршрутам ездки вычитают из загрузок соответствующих клеток и составляют новую матрицу (табл. 61), которую используют для составления кольцевых маршрутов.
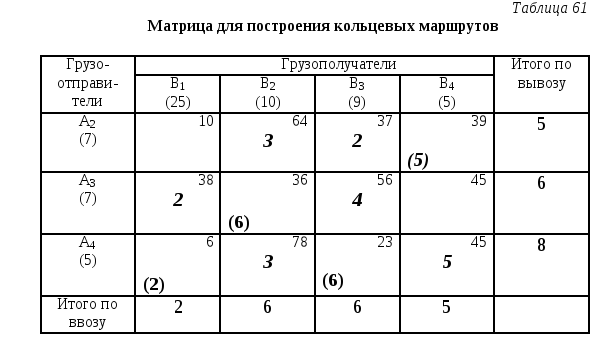
Для формирования кольцевых маршрутов строят замкнутые контуры, вершинами которых являются загруженные ячейки матрицы. Построение контура (табл. 62) начинают с ячейки с груженой ездкой, которую горизонтальной или вертикальной линией соединяют с ячейкой, загруженной холостой ездкой, и в такой последовательности они чередуются, пока контур не замкнется на начальной ячейке. Каждый построенный контур соответствует кольцевому маршруту. Количество оборотов на маршруте соответствует меньшему значению из числа груженых или холостых пробегов на маршруте.

Контур, представленный в табл. 62 (А3В1–А3В2–А2В2–А2В4–А4В4–А4В1–А3В1), состоит из сплошных горизонтальных линий, соответствующих перевозке груза, и пунктирных вертикальных, которые соответствуют подаче порожнего подвижного состава. Минимальная загрузка по этому контуру составляет две ездки. Кольцевой маршрут № 4 формируют, соединяя последовательно по контуру пункты отправления и назначения (А3В1–В1А2–А2В2–В2А4–А4В4–В4А3); по этому маршруту планируют два оборота. Количество оборотов, включенных в маршрут, вычитают из загрузок в вершинах контура, после чего строят новый контур и формируют следующий кольцевой маршрут, пока не будут объединены все груженые и холостые ездки.
Общий пробег подвижного состава при перевозке грузов по рациональным маршрутам зависит, кроме того, от выбора начального пункта маршрута. Если на маятниковом маршруте начальный пункт погрузки однозначно определен, то на кольцевом число начальных пунктов соответствует числу пунктов погрузки на маршруте. Наилучшим будет вариант, при котором нулевой пробег будет минимальным.
Для маршрута № 4 возможны три варианта начального пункта:
1) начальный пункт А3, соответственно окончание маршрута в пункте В4, нулевой пробег при этом (см. расстояния АТП–А3 – 7 км, В4–АТП – 5 км) l н = 12 км;
2) пункты соответственно А2, В1 , l н = 32 км;
3) пункты А4, В2, l н = 15 км.
Наименьшее расстояние в первом варианте, следовательно, начальным пунктом на маршруте № 4 целесообразно принять пункт А3, маршрут при этом будет заканчиваться в пункте В4.
Разработанные схемы маршрутов являются основанием для планирования перевозок, заполнения маршрутных листов и путевой документации водителей.
Самостоятельные занятия по теме 9
I. Подготовить ответы на вопросы:
Экономико-математические методы, применяемые при планировании автомобильных перевозок.
Транспортная сеть. Расчет кратчайших расстояний.
Транспортная задача. Постановка и методы решения.
Применение экономико-математических методов при маршрутизации полнопартионных перевозок.
Применение экономико-математических методов при маршрутизации мелкопартионных перевозок.
Применение методов стохастического моделирования для расчета оптимальной структуры парка подвижного состава.
Моделирование работы автомобильного транспорта и погрузочно-разгрузочных пунктов как системы массового обслуживания.
II. Завершить разработку и подготовить отчет по заданиям 23–25.
Литература
1. Геронимус Б.Л., Царфин Л.В. Экономико-математические методы в планировании на автомобильном транспорте. М.: Транспорт, 1988. С.16–24, 52–66.
2. Горев А.Э. Грузовые автомобильные перевозки: Учеб. пособие для студ. высш. учеб. заведений. М.: изд. центр «Академия», 2004. С.172–260.