

1.4. Структура срв
Системы реального времени (рис. 2) – это параллельные системы с временными ограничениями.

исполнительные механизмы
Рис. 2. Система реального времени
Системы реального времени часто очень сложны, так как их работа связана с многочисленными независимыми потоками входных событий и продуцированием различной выходной информации. Частота поступления событий обычно непредсказуема. Нередко нельзя предугадать и порядок поступления событий. Кроме того, входная нагрузка может с течением времени значительно и неожиданно изменяться. Величина и сложность ПО варьируются от нескольких сотен строк ассемблера или C до 20 миллионов строк Ada для Космической Станции.
Основные требования к срв и их особенности
Гарантируемое время ответа - мы должны с достоверностью предсказать время ответа системы в самом худшем случае; эффективность важна, но предсказуемость - существеннее
Параллельный контроль над отдельными компонентами системы - устройства работают параллельно в реальной жизни;
Реализация СРВ в виде распределенных систем;
необходимо реагировать на различные типы внутренних и внешних событий (периодических и непериодических).
Чрезвычайные требования к надежности и безопасности
Взаимодействие с внешней средой, часто со специальными аппаратными средствами. Как правило, система реального времени осуществляет такое взаимодействие без участия человека.
Система реального времени часто является частью более крупной программно-аппаратной системы, т.е. являются встраиваемыми системами.
Программное обеспечение систем реального времени состоит из приложения реального времени, операционной системы реального времени и, возможно, дополнительного системного ПО: коммуникационных программ, программ промежуточного слоя или драйверов специальных устройств.
1.4.1. Ос
Операционные системы делятся на два класса — операционные системы общего назначения (General Purpose Operation Systems — GPOS) и операционные системы реального времени (Real Time Operation Systems — RTOS).
Основная задача операционных систем общего назначения — эффективное разделение ресурсов ЭВМ (таких как процессорное время, оперативная память и т. п.) между несколькими одновременно выполняющимися программами.
А операционные системы реального времени (ОСРВ) разрабатываются в расчете на наличие внешних источников данных. Основная задача ОСРВ — своевременно обработать запрос, все остальные аспекты функционирования ЭВМ отходят на второй план.
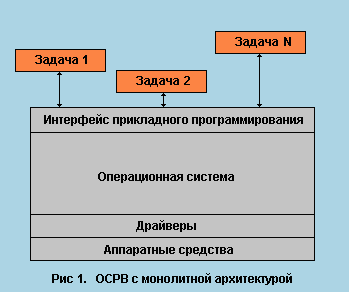
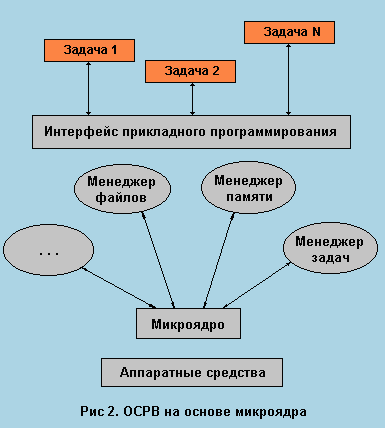
1.4.2. Основные архитектурные решения ос
Все ОСРВ сегодня являются многозадачными системами. Задачи делят между собой ресурсы вычислительной системы, в том числе и процессорное время.
По своей внутренней архитектуре ОСРВ можно условно разделить на монолитные ОС, ОС на основе микроядра. Графически различия в этих подходах иллюстрируются рисунками 1,2.
1.4.3. Основные концепции ос
В процессе эволюции возникло несколько важных концепций, которые стали неотъемлемой частью теории и практики ОС.
Прерывания
Прерывание (hardware interrupt) событие, генерируемое внешним (по отношению к процессору) устройством. Посредством аппаратных прерываний аппаратура либо информирует центральный процессор о том, что возникло какое‑либо событие, требующее немедленной реакции (например, пользователь нажал клавишу), либо сообщает о завершении асинхронной операции ввода‑вывода (например, закончено чтение данных с диска в основную память). Важный тип аппаратных прерываний прерывания таймера, которые генерируются периодически через фиксированный промежуток времени. Прерывания таймера используются операционной системой при планировании процессов.