

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
ТЕМА 3. Основні характеристики та стійкість асинхронних електродвигунів в особливих режимах
3.1 Енергетична діаграма асинхронного електродвигуна
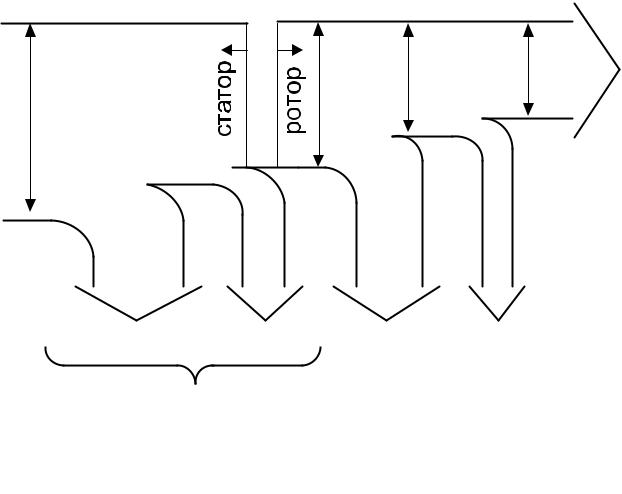
Робота будь-якого асинхронного двигуна супроводжується втратами енергії. З метою наочного представлення розподілу цих втрат застосовують енергетичні діаграми.
Рис. 3.1. Енергетична діаграма асинхронного електродвигуна
Згідно із цією діаграмою:
P1 – електрична потужність, що підведена до затискачів статора від мережі; Pмех – корисна механічна потужність на валу асинхронного двигуна. Споживана з мережі P1 та корисна потужності пов'язані між собою через
ККД двигуна:
P1 = 3U1фI1ф cosϕ = |
Pмех |
(3.1) |
|
η |
|||
|
|
30
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
У випадку номінального навантаження електродвигуна, коли Pмех = Pном номінальна споживана з мережі активна потужність дорівнює:
P |
= 3U |
I |
cosϕ |
ном |
= |
Pном |
, |
(3.2) |
|
η |
|||||||||
1ном |
|
1ном 1ном |
|
|
|
|
|||
|
|
|
|
|
|
ном |
|
|
де Pном – номінальна корисна механічна потужність на валу, що вказана на заводському щитку.
Споживана з мережі повна потужність при номінальному навантаженні:
S |
= 3I |
U |
= |
|
Pном |
|
. |
(3.3) |
η |
cosϕ |
|
||||||
1ном |
1ном |
1ном |
|
ном |
|
|||
|
|
|
|
ном |
|
|
||
Під час роботи двигуна в ньому виникають втрати енергії. Їх можна розрізнити на:
1)електричні втрати в осерді двигуна;
2)електричні втрати в обвитках двигуна;
3)інші (додаткові) електричні втрати, які важко змоделювати, але можна оцінити;
4)механічні втрати на тертя.
Усі електричні втрати поділяються на втрати в статорі та втрати в роторі.
Електричні втрати в статорі асинхронного двигуна.
Електричні втрати в осерді статора p1с спричинені протіканням вихрових струмів Фуко у стальному матеріалі осердя та втратами на його перемагнічення (втрати на гістерезис). Частку втрат в сталі статора kРст приймають рівними 2% від потужності P1ном за номінальної напруги статора:
p1c = kPстP1ном . |
(3.4) |
За іншого значення напруги статора (наприклад, під час застосування частотного керування асинхронним двигуном) ці втрати перераховують пропорційно до квадрата напруги статора.
Електричні додаткові втрати pдод спричинені в основному вищими гармонійними магнітних полів, що виникають внаслідок наявності вищих гармонійних намагнічувальної сили обвиток та зубцевої конструкції статора й
31
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
ротора. Додаткові втрати важко піддаються розрахунку та експериментальному
визначенню. Тому, згідно з чинними стандартами, їхню частку kРдод |
приймають |
рівними 0,5% від від потужності P1ном за номінальної напруги статора: |
|
p1дод = kPдодP1ном . |
(3.5) |
За іншого навантаження ці втрати перераховують пропорційно до квадрата |
|
струму статора. |
|
Електричні втрати в обвитці статора p1м: |
|
p1м = 3R1I12ф , |
(3.6) |
де R1 – резистанс обвитки статора заступної схеми двигуна (рис.3.2).
Усі електричні втрати в статорі асинхронного двигуна, таким чином, дорівнюють:
p1Σ = |
p1м + |
p1дод + |
p1c |
= 3R1I12ф + kPдодP1ном + kPстP1ном . |
|
(3.7) |
||||||||||||||||
Електромагнітна потужність, яка передається від статора до ротора |
||||||||||||||||||||||
через повітряний проміжок: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
P |
= ω M |
Е |
= |
3 R |
2 |
(s)+ R |
2 |
(s) |
1 −s I2 |
= 3 |
R2 (s) |
I2 |
= P − |
p |
= |
|||||||
|
||||||||||||||||||||||
Е |
s |
|
|
|
|
|
|
|
|
|
s |
p |
|
s |
p |
1 |
1Σ |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.8) |
||
= P − (3R |
|
I2 |
+ k |
|
|
P |
|
+ k |
|
P |
) |
|
|
|
|
|
||||||
|
|
|
|
Pст |
|
|
|
|
|
|
||||||||||||
|
1 |
|
|
1 1ф |
|
Pдод 1ном |
|
|
|
1ном |
|
|
|
|
|
|
|
|||||
Електричні втрати в роторі асинхронного двигуна.
Електричні втрати в осерді ротора p2с також спричинені протіканням вихрових струмів Фуко у стальному матеріалі осердя та втратами на його перемагнічення (втрати на гістерезис). Втрати в сталі ротора в номінальному режимі роботи асинхронного двигуна ми не враховуємо, оскільки частота струму в роторі за номінального режиму дуже мала.
Електричні втрати в обвитці ротора p2м:
p2м = 3R2 |
(s)I2p = s 3 |
R2 (s) |
I2p = sPЕ = s (P1 − (3R1I12ф + kPдодP1ном + kPстP1ном )), (3.9) |
|
s |
||||
|
|
|
де s – ковзання ротора асинхронного двигуна;
R2(s) – залежний від ковзання резистанс обвитки ротора заступної схеми двигуна
(рис. 3.2);
32
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
PЕ – електромагнітна потужність, яка передається від статора до ротора через повітряний проміжок.
Потужність на валу P2:
P = P − p |
2м |
= P −sP = (1−s)P = |
1 −s sP = |
1 −s p |
2ел |
(3.10) |
||||||
2 Е |
|
Е |
Е |
Е |
s |
Е |
s |
|||||
|
|
|
|
|
|
|
|
|
|
|
||
або: |
|
|
|
|
|
|
|
|
|
|
|
|
P2 = PЕ − |
p2м = PЕ − sPЕ = PЕ (1 − s) = (P1 − (3R1I12ф + kPдодP1ном + kPстP1ном ))(1 − s) (3.11) |
|||||||||||
Механічні втрати у підшипниках та вентиляційній системі |
pмех |
|
можна |
|||||||||
приймати в розмірі kPмех = 0,01 (в середньому — один відсоток від споживаної
електричної потужності: |
|
pмех = kPмехP1 . |
(3.12) |
Усі втрати в роторі асинхронного двигуна, таким чином, дорівнюють: |
|
p2Σ = p2м + pмех = s (P1 −(3R1I12ф + kPдодP1ном + kPстP1ном))+ kPмехP1ном . |
(3.13) |
Корисна потужність на валу в номінальному режимі Pном: |
|
Pном = P2 − pмех = P1 −( p1Σ + p2м + pмех ). |
(3.14) |
У розрахунках стійкості АД, як правило, можна знехтувати p1Σ, й у такому випадку P1=PЕ.
Опори R2 та Xσ залежать від режиму роботи АД. При збільшенні ω2=sω1 підсилюється поверхневий ефект у провідниках обвитки ротора. Цей ефект проявляється у тому, що більша частина струму концентрується ближче до поверхні провідників. Резистанс R2 при цьому збільшується. Індуктивний опір Xσ зменшується за рахунок того, що більша частина магнітного потоку розсіяння ротора витискується у повітряний проміжок, магнітний опір якого значно більший, ніж у сталі.
Вплив частоти обертання ротора (чи ковзання) на значення опорів R2 та Xσ помітно проявляється у асинхронних двигунів будь-якого виконання. Тому у загальному випадку неприйнятні як припущення R2=const та Xσ=const, так й заснована на них формула Клосса.
33