

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
2.2 Основні практичні критерії стійкості електропостачальних систем.
2.2.1 Перший практичний критерій: dE/dU2>0
EЕКВ |
X ЗОВ |
U2 |
PЕКВ
QЕКВ Н
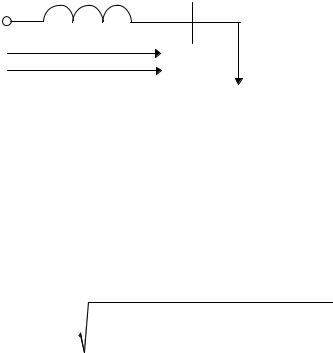
Рис. 2.5. Еквівалентна заступна схема.
Одним із таких критеріїв, якій потребує найменших витрат часу для розрахунків, є критерій dE / dU2 > 0 . Схему системи будь-якої складності, що живить вузол навантаження представимо еквівалентною заступною схемою відносно шин вузла з напругою U2 (рис.2.5).
Із відомої формули |
U2 |
= EЕКВ − |
QЕКВ XЗОВ |
2 |
+ |
PЕКВ XЗОВ |
2 |
, |
нехтуючи |
|
|
||||||||
|
|
|
EЕКВ |
|
EЕКВ |
|
|
||
поперечною складовою спаду напруги, отримуємо:
U2 = EЕКВ − |
QЕКВ XЗОВ |
. |
|
|
|
(2.5) |
||||
|
|
|||||||||
|
|
|
EЕКВ |
|
|
|
|
|
|
|
Похідна від U2 по EЕКВ має вигляд: |
|
|||||||||
dU2 |
|
XЗОВ |
XЗОВ dQЕКВ |
|
||||||
|
=1+ |
|
QЕКВ − |
|
|
|
|
(2.6) |
||
dEЕКВ |
E2ЕКВ |
EЕКВ dEЕКВ |
||||||||
В отриманому виразі перш за все привертає увагу похідна dQЕКВ / dEЕКВ . Якщо припустити, що QЕКВ є реактивною потужністю, яку споживає асинхронне навантаження вузла як деякий еквівалентний асинхронний двигун, то похідна dQЕКВ / dEЕКВ є не що інше, як його регулювальний ефект, а з попереднього відомо, що при dQЕКВ / dEЕКВ = −∞ асинхронний двигун працює у критичному режимі, тобто за критичної напруги на його затискачах. Отже, повертаючись до виразу (2.5), можна побачити, що якщо dQЕКВ / dEЕКВ → −∞ , то dU2 / dEЕКВ → +∞ , а
22
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
dEЕКВ / dU2 → 0 . Умова dEЕКВ / dU2 = 0 відповідатиме критичному режиму роботи еквівалентного асинхронного двигуна вузла навантаження за EЕКВкр.
EЕКВ
 a
a
 U2КР
U2КР
0.75 |
0.8 |
0.85 |
0.9 |
0.95 |
1 |
1.05 |
U2 |
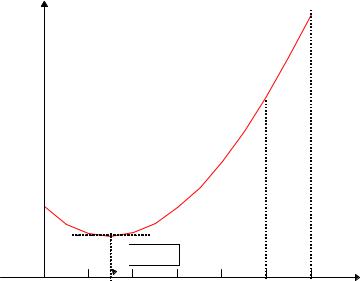
Рис. 2.6. Характеристика EЕКВ=f(U2)
Розрахунок стійкості вузла навантаження за критерієм dE/dU починають із побудови залежності EЕКВ=f(U2), для чого слід задати низку значень U2, за якими зі статичних характеристик визначають відповідні значення PЕКВ та QЕКВ й будують характеристику EЕКВ=f(U2), мінімум якої дає значення U2кр
(рис. 2.6).
2.2.2 Другий практичний критерій: d( Q)/dU2>0
Це критерій d( Q)/dU>0, який випливає з балансу реактивної потужності системи живлення та вузла навантажень.
Загалом маємо дві точки перетину статичних характеристик реактивної потужності джерела живлення (еквівалентного синхронного генератора системи) та вузла навантажень, у яких є рівновага (баланс) реактивної потужності джерела живлення та споживача (рис. 2.7).
Режим у точці a. З відхиленням режиму у бік збільшення напруги U2 на + U порушується баланс реактивної потужності між джерелом та споживачем
Q=Qнав−Qдж>0, тобто, виникає дефіцит реактивної потужності, що призводить до зниження напруги, тобто режим прагне повернутися у точку a.
23
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
|
При відхиленні режиму у бік |
||||
|
зменшення напруги U2 на − U |
||||
|
також |
порушується |
баланс |
||
|
реактивної |
|
потужності |
між |
|
|
джерелом |
|
та |
споживачем |
|
|
Q=Qнав−Qдж<0, |
|
тобто, |
||
|
утворюється надлишок реактивної |
||||
|
потужності, |
що |
зумовлює |
||
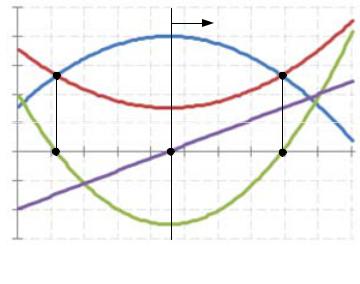
Рис. 2.7. Характеристика EЕКВ=f(U2) |
підвищення напруги, і режим знову |
||||
|
прагне повернутись у точку a. |
||||
Висновок: режим роботи ЕПС у точці a є режимом стійкої динамічної рівноваги (стійким).
Режим у точці b. З відхиленням режиму у бік збільшення напруги U2 на + U
утворюється надлишок реактивної потужності Q=Qнав−Qдж<0,що призводить до підвищення напруги U2 і, в кінцевому результаті, режим роботи переходить у точку a.
При відхиленні режиму у бік зниження напруги U2 на − U утворюється дефіцит реактивної потужності Q=Qнав−Qдж>0, що призводить до подальшого неперервного зниження U2. Таке явище неперервного некерованого зниження напруги має назву “лавина напруги”, яка супроводжується масовим гальмуванням електродвигунів вузлів навантажень й призводить до повного розладу режиму роботи електричної системи. Лавина напруги що є найтяжким наслідком порушення стійкості режиму роботи ЕПС.
Висновок: режим роботи ЕПС у точці b є режимом нестійкої динамічної рівноваги чи просто нестійким.
Для визначення критичної напруги вузла навантажень слід скористатись залежністю саме небалансу реактивної потужності від напруги Q=f(U2), яка наведена на рис. 2.7. З метою надійного визначення критичної напруги за Uкр
24
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
приймають напругу, якій відповідає мінімум функції регулювальний ефект).
За допомогою критерію d( Q)/dU зручно повно та наочно виявити вплив конкретних факторів на баланс реактивної потужності та показники стійкості заданих режимів роботи ЕПС у цілому.
|
Приклад 1. Вплив АРЗ |
||||
|
досить |
наочно |
виявляється |
з |
|
|
рис. 2.8. Крива Qнав зображає |
||||
|
статичну характеристику вузла, |
||||
|
крива |
Qдж |
– |
статичну |
|
|
характеристику |
генератора без |
|||
|
АРЗ, крива Q'дж – статичну |
||||
|
характеристику |
генератора |
з |
||
|
АРЗ. Із попереднього відомо, |
||||
Рис. 2.8. Характеристика EЕКВ=f(U2) |
що АРЗ збільшує максимум та |
|
|||
крутість (регулювальний ефект) статичної характеристики генератора, а також, як випливає з рис. 2.8, віддаляє точку нестійкого режиму роботи ЕПС. Тому, як наслідок, зменшується значення Uкр. Необхідно також зауважити, що d( 'Q)/dU2>d( Q)/dU2.
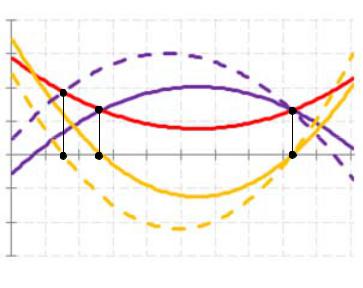
Приклад 2. Вплив конденсаторів поперечної компенсації вузла навантажень на показники стійкості ЕПС також досить наочно виявляється з рис. 2.9. Криві Qнав та Qдж відображають вихідний режим ЕПС за відсутності АРЗ у джерела живлення. БК у вузлі навантажень відсутня. Цьому режиму відповідають контрольні точки режиму: U2 та Uкр. У випадку ввімкнення БК у вузлі навантаження для підвищення коефіцієнту потужності до характеристик Qнав та Qдж додається статична характеристика БК (QC), яка має від'ємний знак у всьому діапазоні зміни напруги U. Сумарна статична характеристика вузла (Q'нав) йде похиліше, що зумовлює підвищення напруги на шинах вузла до значення U'2, яке може вийти за межі допустимої робочої напруги.
25