

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
Q
Qдж
|
b |
Q’дж |
a |
|
b' |
Qнав |
a'' |
|
|
a' |
|
|
|
|
|
|
|
Q’нав |
|
0 |
Uкр U’кр |
QC |
1 |
|
|
U2 U’2 |
’Q
Q
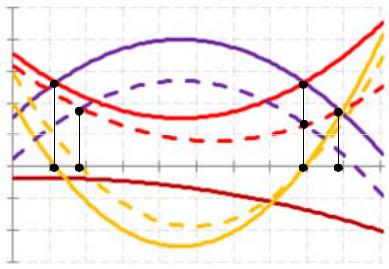
Рис. 2.9. Характеристика EЕКВ=f(U2)
Щоб повернути напругу на шинах вузла до вихідного значення, слід знижувати Ed генераторів системи, тобто максимум характеристики Qдж доти, доки напруга на шинах
Uвузла не повернеться до вихідного значення, тобто крива Qдж має зайняти положення Q'дж. Новому режиму роботи ЕПС відповідають контрольні точки
U2 та U'кр, причому U'кр >Uкр.
Висновок: застосування БК у будь-якому вузлі навантаження погіршує стійкість режиму роботи як самого вузла навантаження, так й ЕПС у цілому. Запобігти такій ситуації повністю або частково можна одночасним застосуванням АРЗ синхронних генераторів системи та синхронних двигунів чи компенсаторів з АРЗ
увузлі навантаження.
2.3Статичні характеристики типового навантаження електропостачальних систем
Поняття “критична напруга” (Uкр) прийнято вживати перш за все стосовно режиму роботи асинхронного двигуна: Під час зниження напруги на виводах асинхронного двигуна, починаючи з її критичного значення двигун починає гальмуватись аж до повної зупинки, що й вважається за порушення стійкості режиму роботи асинхронного двигуна. Отже, значення Uкр визначає діапазон допустимих знижень напруги на затискачах асинхронного двигуна за умов його статичної стійкості. Якщо для дослідження статичної стійкості використовується багатоелементна фізична модель, що містить декілька еквівалентних двигунів, які суттєво відрізняються параметрами (як приклад, їхні статичні характеристики
26

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
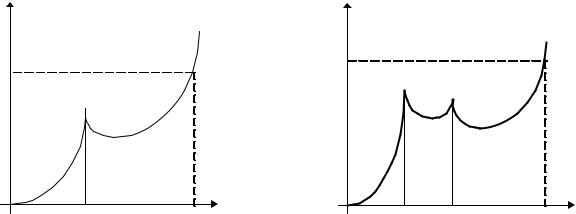
зображено на рис. 2.10), то експериментальна статична характеристика міститиме декілька відповідних критичних напруг (рис. 2.11-б). Статичні характеристики дозволяють визначити також Uкр окремого двигуна чи то вузла навантаження в цілому (рис. 2.11-а).
 P, Q
P, Q
1.2 |
|
|
|
|
|
|
|
1.1 |
|
|
|
|
|
|
|
1 |
|
|
P110 кВ |
|
a |
|
|
|
|
|
|
|
|
|
|
0.9 |
|
Q110 кВ |
|
|
|
|
|
0.8 |
Q6.3 кВ |
|
|
|
|
|
|
0.70 0.75 0.8 |
0.85 |
0.9 |
0.95 |
1 |
1.05 |
U2 |
|
Рис. |
2.10. |
Статичні |
|
характеристики |
|||
потужностей |
фізичної |
моделі |
|
вузла |
|||
навантаження |
з |
різним |
асинхронним |
||||
навантаженням |
|
|
|
|
|
||
Під час аналізу режимів роботи ЕПС неможливо урахувати особливості статичних характеристик кожного (конкретного, окремого) із загальної кількості електроприймачів, що складають вузол навантажень, тим більше на стадії проектування. За цих умов доводиться користуватись так званими узагальненими типовими статичними характеристиками вузла навантаження у цілому. Такі характеристики розроблені на основі багаторічних статистичних
даних експлуатації та наукових досліджень для найхарактерніших підприємств усіх галузей промисловості, а також міст та сільськогосподарських зон. На рис. 2.11-б зображено статичну характеристику вузла навантаження для деякого усередненого складу електроприймачів, що наведений у таблиці 2.1. З неї видно, що основу промислового вузла навантаження складають асинхронні двигуни.
Тому головною метою розрахунків статичної стійкості вузла навантаження є визначення критичної напруги вузла Uкр, яка й визначає міру стійкості деякого еквівалентного асинхронного двигуна, який узагальнює все асинхронне навантаження вузла.
27
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
Q |
|
|
|
|
U |
0 |
Uкр |
1 |
Q |
|
|
|
|
U |
0 |
Uкр1 Uкр2 |
1 |
а) один еквівалентний |
б) два еквівалентні |
асинхронний двигун |
асинхронні двигуни |
Рис. 2.11. Статичні характеристики реактивної потужності фізичної моделі вузла навантаження
Розглядаючи уважно ці характеристики можна дійти висновку, що безпосередньо за характеристиками Q=f(U2) неможливо визначити Uкр еквівалентного асинхронного двигуна вузла й цілком неможливо це зробити за формулою через відсутність еквівалентних параметрів заступної схеми еквівалентного електродвигуна.
Критерії стійкості асинхронних і синхронних машин, а саме:
dE/dU2>0, d( Q)/dU2>0, |
dP/ds>0, |
dP/dδ>0 |
(2.7) |
можна застосовувати за умови, що параметри еквівалентного двигуна вузла навантаження відомі. Однак, задача еквівалентування параметрів елементів ЕПС є дуже складною, а часто взагалі не розв'язується. Тому треба знаходити такі критерії стійкості вузлів навантажень, які б, з одного боку, відповідали вищезгаданим критеріям і, з іншого боку, були б придатні для практичних інженерних розрахунків.
28
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
Таблиця 2.1. Усереднений склад електроприймачів
Найменування електроприймачів |
% |
|
|
|
|
1. |
Дрібні асинхронні електродвигуни |
34 |
|
|
|
2. |
Потужні асинхронні електродвигуни |
14 |
|
|
|
3. |
Синхронні електродвигуни |
10 |
|
|
|
4. |
Освітлення з лампами розжарювання |
25 |
|
|
|
5. |
Випростувачі, інвертори, печі, нагрівальні прилади |
10 |
|
|
|
6. |
Втрати у мережах |
7 |
|
|
|
|
РАЗОМ |
100 |
|
|
|
29