

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
3.9Несиметричні режими асинхронних двигунів
Важливий вплив на роботу вузлів навантажень електропостачальних систем виявляють несиметричні режими асинхронних двигунів. Такі режими зумовлюють протікання струмів симетричних послідовностей у електромережі.
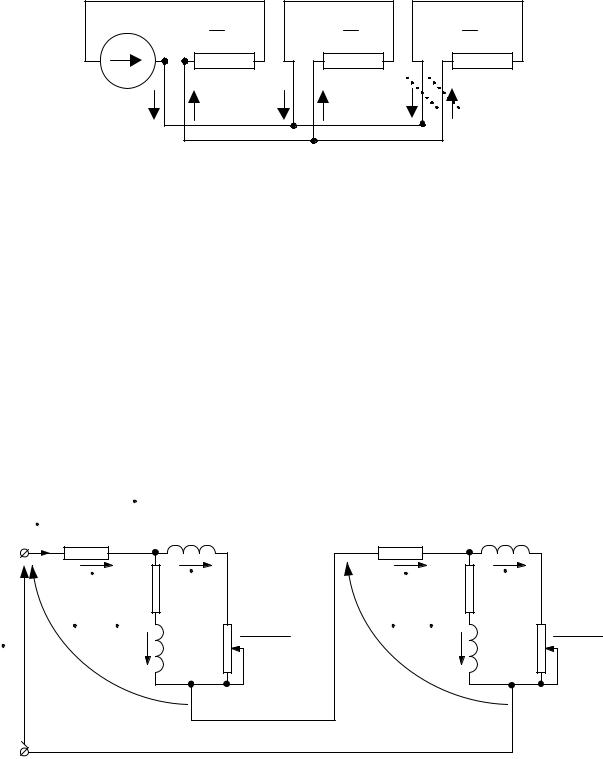
Дослідження несиметричних режимів асинхронних двигунів проведемо на прикладі фрагменту схеми електропостачальної системи, зображеного на рис. 3.11.
Рис. 3.11 Фрагмент схеми електропостачальної системи в несиметричному режимі
Найпоширенішою причиною виникнення несиметричного режиму асинхронного двигуна є несиметричність напруги на затискачах його статора.
У свою чергу причинами несиметричності напруги на затискачах АД можуть бути:
•несиметричність напруги мережі живлення;
•несиметричність опорів у колах статора й ротора.
Окремою причиною несиметричного режиму асинхронного двигуна може бути несиметрична схема з'єднань обвиток статора (ротора) внаслідок помилки. Такі помилки трапляються досить рідко (в основному – внаслідок непрофесійних дій некваліфікованого персоналу). Тому ми надалі не розглядатимемо несиметричні режими, викликані цієї причиною.
Дослідження несиметричних режимів здійснимо методом симетричних складових. Узагальнену комплексну заступну схему асинхронного двигуна в несиметричному режимі, що виник внаслідок розриву однієї фази (наприклад, внаслідок перегоряння топкої вставки), наведено на рис.3.12.
81
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
|
Z (1) |
|
Z(2) |
|
Z(0) |
|
U1(1) |
|
|
||||
|
|
|
|
|
|
|
I |
I |
(1) |
I(2) |
I(2) I(0) |
I(0) |
|
(1) |
|
|
|
|
|
|
Рис. 3.12 Узагальнена заступна схема асинхронного двигуна у несиметричному режимі
Індексами (1), (2) та (0) у дужках у подальшому позначені опори, а також складові струмів та напруг прямої, оберненої та нульової послідовностей.
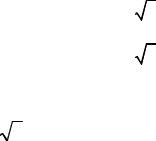
Асинхронні двигуни загального призначення практично завжди працюють без нейтрального провідника. Тому можна вважати, що опір нульової послідовності Z(0)=∞, і його можна вилучити із заступної схеми, що на рис.3.12, суттєво спростивши її. На рис. 3.13 зображено розрахункову заступну схема асинхронного двигуна у несиметричному режимі. Індексами 1 і 2 без дужок позначені еквівалентні опори відповідно статора й ротора.
|
R1м(1) |
U1(1) |
|
R1м(2) |
X (s2) |
I1 |
X |
(s1) |
|||
|
I 1(1) |
I 2(1) |
I 1(2) |
2(2) |
|
|
|
Rсд |
|
|
Rсд |
|
U1(1) I |
|
R (s1) |
U1(2) I |
R (s2) |
U1 |
|
s1 |
s2 |
||
|
X ( |
) |
|
X (2) |
|
|
|
|
|||
Рис. 3.13 Розрахункова заступна схема асинхронного двигуна у несиметричному режимі
Напруга U1(1) прямої послідовності викликає в обвитці статора асинхронної машини струм прямої послідовності I1(1), який утворює магнітне поле та магнітний потік прямої послідовності, що обертається із швидкістю:
82
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
n(1) = f1 |
, |
(3.155) |
p |
|
|
де p – кількість пар полюсів обвитки статора.
Це обертове магнітне поле індукує струм прямої послідовності I2(1) у обвитці ротора. Струми I1(1) та I2(1) утворюють результатне магнітне поле прямої послідовності, що обертається із швидкістю n1. Ковзання ротора відносно цього поля є ковзанням прямої послідовності:
|
n |
1 −n |
р |
|
n |
р |
|
|
s(1) = s = |
|
( ) |
|
=1− |
|
. |
(3.156) |
|
|
n(1) |
|
|
|
||||
|
|
|
|
n(1) |
|
|||
Струми та магнітне поле прямої послідовності утворюють у двигуна з m1 –
фазною обвиткою статора обертовий момент прямої послідовності
(прискорювальний момент):
|
R |
2(1) |
I2 |
|
||
M(1) = m1 |
|
|
2(1) |
. |
(3.157) |
|
ωs |
(1) |
|||||
|
|
1 |
|
|
|
|
Напруга U1(2) зворотної послідовності викликає у первинному колі асинхронної машини струм зворотної послідовності I1(2) , що утворює магнітне поле та магнітний потік зворотної послідовності, що обертається із швидкістю:
n(2) = −n(1) = − f1 . |
(3.158) |
p |
|
Це обертове магнітне поле індукує струм зворотної послідовності I2(2) у
обвитці ротора. Струми I1(2) та I2(2) утворюють результатне магнітне поле зворотної послідовності, що обертається із швидкістю n2. Ковзання ротора
відносно цього поля є ковзанням зворотної послідовності: |
|
||||||||||||||||
|
|
n |
2 |
) |
−n |
р |
|
−n 1 − n |
р |
|
n 1 + n |
р |
|
n |
р |
|
|
s(2) |
= |
|
( |
|
|
= − |
( ) |
|
= |
( ) |
|
=1+ |
|
. |
(3.159) |
||
|
n(2) |
|
−n(1) |
|
n(1) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
n(1) |
|
|||||||
|
З (3.132) визначимо nр: |
|
|
|
|
|
|
|
|||||||||
nр |
= (1−s)n(1) . |
|
|
|
|
|
|
|
|
|
(3.160) |
||||||
та, підставивши у (3.135), отримуємо:
83
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
s(2) = 2 −s . |
(3.161) |
Для системи струмів та напруг зворотної послідовності заступна схема є аналогічною схемі прямої послідовності, однак замість s(1) = s треба підставити s(2) = 2–s (рис.3.12, 3.13).
Струми та магнітне поле зворотної послідовності утворюють обертовий момент зворотної послідовності (гальмівний момент):
M |
|
= −m |
R2(2) |
I2 |
= −m |
R2(2) |
I2 |
. |
(3.162) |
|
|
ω s |
|
ω (2 −s) |
|||||||
|
(2) |
1 |
2 |
2(2) |
1 |
2(2) |
|
|
||
|
|
|
1 |
|
|
1 |
|
|
|
|
На ротор машини діє єдиний результатний обертовий момент:
M |
|
= M |
|
+ M |
|
= m |
R2(1) |
I2 |
− m |
R2(2) |
I2 . |
(3.163) |
|
|
|
ωs |
|
||||||||
|
E |
|
(1) |
|
(2) |
1 |
2(1) |
1 ω (2 −s) |
2(2) |
|
||
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
Слід підкреслити, що залежні від ковзання параметри ротора R2 та X2 є різними для струмів прямої та зворотної послідовностей. Особливо це виявляється у двигунах із посиленим використанням явища витіснення струму в
роторі, оскільки частоти f2(1) =sf1 та f2(2) = (2 −s)f1 цих струмів є різними. Для аналізу несиметричних режимів асинхронних двигунів і обчислення параметрів елементів заступної схеми за методикою, описаною в розділах 3.4 та 3.5, вважатимемо, що:
|
; |
|
|
|
|
R2(1) (s(1) )= R2(1) (s) |
(3.164) |
||||
|
|
; |
|
||
R2(2) (s(2) )= R2(2) (2 − s) R2(1) (2 − s) |
(3.165) |
||||
|
; |
|
|
||
Xσ(1) (s(1) )= Xσ(1) (s) |
(3.166) |
||||
|
. |
|
|||
Xσ(2) (s(2) )= Xσ(2) (2 − s) Xσ(1) (2 − s) |
(3.167) |
||||
У відносних одиницях, згідно зі заступною схемою (рис. 3.2, 3.13) для m1=3,
ω1=ωб=ωs:
84

ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
R2(1) |
|
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
s |
|
2(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2(1) I2(1) 2 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
M(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωs |
|
|
zб |
|
zб |
|
|
|
|
|
|
|
|||||||||||||||||
M(1) = |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
3R2(1)I2(1) |
|
|
|
|
|
|
= |
|
|
|
|
|
Iб |
= |
|
|
||||||||||||||||||||||||||||||
|
Mб |
|
|
|
|
|
|
|
|
|
|
Sб |
|
|
|
|
|
|
|
|
|
ωss |
|
|
|
|
|
3UбIб zб |
|
|
|
|
|
|
|
s |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (3.168) |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
R |
2(1)* |
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
|
2(1)* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Підставимо |
у |
|
вираз |
|
|
(3.144) |
|
для |
|
М(1)* |
|
значення |
|
|
струму |
I2(1) = |
U2(1) |
. |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3z2(1) |
|
В результаті отримаємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
I2(1)* |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
2(1)* |
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
2 |
|
|
R |
|
|
|
|
U |
|
|
|
U |
|
|
|
|
|
|
2 |
|
|
|
|
||||||||||||
M(1) = |
|
|
|
|
|
|
|
|
|
I |
б |
|
|
|
|
2(1)* |
|
|
|
|
2(1) |
|
|
|
2(1)* |
|
2(1)* |
б |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
= |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
I |
|
|
3Z |
|
|
|
|
|
|
|
s |
|
|
3I |
|
Z |
|
|
|
Z |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
б |
2(1)* |
б |
|
. |
(3.169) |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
R |
2(1)* |
U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
|
|
2(1)* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
sZ2(1)*2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Аналогічним чином отримуємо вираз для гальмівного моменту М2: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
R |
2(2)* |
I2 |
|
|
|
|
|
|
|
|
R |
2(2)* |
U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
M |
(2) |
= − |
|
|
2(2)* |
= − |
|
|
|
|
2(2)* |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.170) |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
(2 −s) |
|
|
|
|
|
|
(2 −s)Z2(2)*2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Під впливом струмів зворотної послідовності результивний момент двигуна
MΣ знижується, робоче ковзання за того самого значення Mмех збільшується. Тому, як наслідок, зростають втрати на нагрівання двигуна й, у кінцевому результаті, знижується ККД двигуна.
Висновок: несиметричність напруги мережі погіршує умови роботи двигуна. Тому її слід усіляко уникати, зокрема, – застосовуючи спеціальні технічні засоби (симетрувальні пристрої).
Одним із найнебезпечніших аварійних режимів асинхронного двигуна є обрив однієї фази статора. Причиною такої ситуації може бути перегоряння запобіжника однієї фази (наприклад, фази А) низьковольтного двигуна під час його роботи з повним навантаженням.
85
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
За методом симетричних складових рівняння для цього випадку матимуть вигляд:
IA |
= IA(1) + IA(2) + IA(0) = IA(1) + IA(2) +0 = IA(1) + IA(2) = 0 ; |
|
|
|
|
|
|
|
|
|
|
(3.171) |
|||||||||||||||||||||||||||||||||||
IB = IB(1) + IB(2) + IB(0) |
= IB(1) + IB(2) +0 = a2IA(1) +aIA(2) ; |
|
|
|
|
|
|
|
|
|
|
(3.172) |
|||||||||||||||||||||||||||||||||||
IC |
= IC(1) + IC(2) + IC(0) |
= IC(1) + IC(2) +0 = aIA(1) +a2IA(2) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.173) |
|||||||||||||||||||||||||||||||
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де a = ej 3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
З цих рівнянь отримуємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
IA(1) = −IA(2) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.174) |
||
IB = a2IA(1) −aIA(1) |
= (a2 −a)IA(1) |
= −j |
|
3IA(1) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.175) |
||||||||||||||||||||||
IC |
= aIA(1) −a2IA(1) |
= (a −a2 )IA(1) |
= +j |
|
3IA(1) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.176) |
||||||||||||||||||||||
|
Отже: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IA = 0 ; IB = −IC = |
|
3IA(1) |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.177) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Трохи перетворимо вираз (3.146) для M(2)* із врахуванням (3.153): |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
(2) = − |
R |
2(2)* |
2 |
|
|
= − |
s R |
2(2)* |
|
|
R2(1)* |
2 |
|
= − |
|
|
|
s |
|
|
R2(1)* |
R2(2)* |
2 |
|
|
|
|
|||||||||||||||||||
M |
|
|
|
I2(2)* |
|
|
|
|
|
|
|
|
|
|
|
|
|
I2(2)* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2(2)* , |
(3.178) |
|||||||||||||
(2 |
−s) |
s (2 |
−s) R2(1)* |
|
(2 |
−s) s |
|
|
R |
2(1)* |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Припустивши (для спрощення), що R2(2)* R2(1)* (3.165), отримуємо: |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
s |
|
|
R |
2(1)* R2(2)* |
|
2 |
|
|
|
|
|
|
|
s |
R2(1)* |
|
2 |
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
||||||||||||
M(2) = − |
|
|
|
|
|
|
|
|
|
|
|
|
|
I2(2)* − |
|
|
|
|
|
|
|
|
I2(1)* |
|
= − |
|
|
|
|
|
M(1) |
. |
|
(3.179) |
|||||||||||||
(2 |
−s) |
|
|
|
s |
|
|
R2(1)* |
(2 −s) |
s |
|
|
|
|
(2 |
−s) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Отже: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
1−s |
|
|
|
|
||||||||
ME = M(1) + M(2) |
M(1) + |
− |
|
|
|
|
M(1) = 1 |
− |
|
|
|
|
M(1) |
= |
2 |
|
|
|
M(1) |
.(3.180) |
|||||||||||||||||||||||||||
2 −s |
|
2 |
−s |
2 −s |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
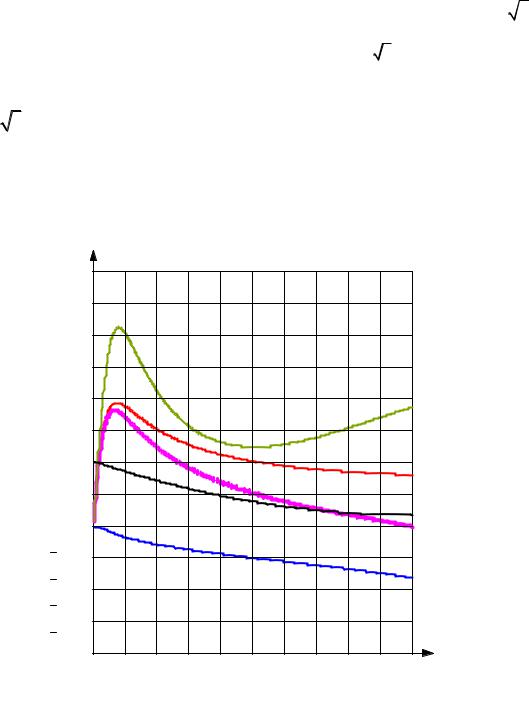
Як видно з (3.156), за номінального навантаження, коли ковзання s мале, електромагнітний момент від струмів оберненої послідовності дуже малий, і ним можна знехтувати. Тобто, у нормальних режимах можна вважати ME M(1) .
Навпаки, при s=1 маємо M(2) –M(1) , тобто MEпуск 0 (рис. 3.14).
Якщо прийняти умову, що у нормальному режимі струм фази А асинхронного двигуна мав номінальне значення IA=IA(1)=Iном, то у несиметричному
86
ОПТИМАЛЬНІ РЕЖИМИ ВУЗЛІВ НАВАНТАЖЕННЯ ЕЛЕКТРОПОСТАЧАЛЬНИХ СИСТЕМ
режимі за умови обриву фази А струм непошкоджених фаз IB = −IC = |
3IA(1) – |
||
тобто струм у непошкоджених фазах збільшується у 3 разів. |
Із урахуванням |
||
збільшення |
ковзання матимемо ще значніше збільшення |
цього |
струму: |
IB = −IC > |
3Iном . |
|
|
Приклад механічних характеристик несиметричного режиму асинхронного двигуна за умови обриву однієї фази зображено на рис. 3.14.
Рис. 3.14. Механічна характеристика асинхронного електродвигуна типу
4АН355М4У3 (Pном=400 кВт, Uном=380)
у несиметричному режимі, зумовленому обривом фази А
87