

11. Збурення коливань, критерії оцінки, випадкові коливання
11.1. Збурення від нерівності дороги
При обговоренні вимушених коливань використовувалась гармонічна функція
|
|
(11.1) |
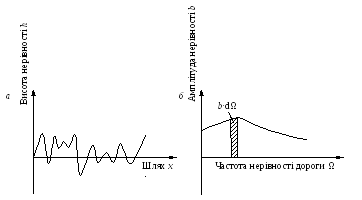
Таку збурювальну функцію можна уявити як хвилясту дорогу (рис. 11.1), що спонукає до коливань рухомий автомобіль. Нерівності дороги h передусім
|
|
|
Рис. 11.1. Синусоїдальний профіль дороги в функції часу (а) і шляху (б) |

залежать від шляху x, а не від часу t. Залежність від часу t можна отримати тільки для конкретної швидкості руху. За рис. 11.1 вираз для нерівностей в функції шляху має вигляд
|
|
(11.2) |
де частота нерівності дороги
|
|
(11.3) |
а L є довжиною хвилі.
При русі зі сталою швидкістю v можна записати
|
|
(11.4) |
Відповідна
залежність між частотою нерівності
дороги Ω і частотою ω випливає з рівнянь
(11.1) та (11.2). Мусить бути виконана умова
![]() .
На підставі рівняння (11.4) отримуємо
.
На підставі рівняння (11.4) отримуємо![]() ,
тож
,
тож
|
|
(11.5) |
За сталої довжині хвилі L частота збурення росте разом із швидкістю руху v. Для певної конкретної довжини хвилі L можна, наприклад, амплітудно-частотну характеристику автомобіля з рис. 10.11 подати в такий спосіб, що на осі абсцис відкладені замість частот збурення ω швидкості руху v (рис. 11.2а).
|
|
|
Рис. 11.2. Перебіг коефіцієнта підсилення прискорень кузова для одномасової системи: а — при русі з різними швидкостями по хвилястій дорозі зі сталою довжиною хвилі; б — при русі зі сталою швидкістю по дорогах з різними довжинами хвилі L |

Можна це собі
уявити так, ніби одновісний автомобіль
Б проїжджає з різними швидкостями
дорогу, яка має синусоїдальний профіль
зі сталою довжиною хвилі L.
При невеликій швидкості руху v1
амплітуда прискорень, позначена
![]() ,
є мала відносно амплітуди нерівностіb.
При швидкості руху v2
виникає резонанс — частота збурення ω
докладно дорівнює частоті власних
коливань ν. При подальшому зростанні
швидкості прискорення зменшуються, а
потім понад v3
знову зростають.
,
є мала відносно амплітуди нерівностіb.
При швидкості руху v2
виникає резонанс — частота збурення ω
докладно дорівнює частоті власних
коливань ν. При подальшому зростанні
швидкості прискорення зменшуються, а
потім понад v3
знову зростають.
Можна собі також уявити залежність коефіцієнтів підсилення від частоти збурення так, ніби автомобіль проїжджає зі сталою швидкістю v нерівності з різною довжиною хвилі L.
За рис. 11.2б
великі значення прискорень досягаються
при довжині хвилі
L1
і при дуже довгих хвилях. Зі сказаного
випливає, що для збурення коливань
істотна є тільки частота ω, тобто
комбінація швидкості руху v
і довжини хвилі
L.
Очевидно, що важлива є також величина
амплітуди b,
бо якби вона дорівнювала нулю (рівна
дорога), не потрібно було би взагалі
займатись коливаннями. Взаємозалежність
ω, v
і L
відображає графік в логарифмічній шкалі
на рис. 11.3. З наведених тут частот власних
коливань кузова
![]() і коліс
і коліс![]() ,
які найчастіше виступають в автомобілях,
і отриманих на їх основі зон частот
збурення випливає, що для швидкостей в
межах 36…180 км/год важливими є довжини
хвилі 0,3…100 м.
,
які найчастіше виступають в автомобілях,
і отриманих на їх основі зон частот
збурення випливає, що для швидкостей в
межах 36…180 км/год важливими є довжини
хвилі 0,3…100 м.
|
|
|
|---|
 Рис.
11.3. Зони частот збурення і довжин хвиль
нерівностей, що виникають з частоти
власних коливань і швидкості руху
автомобіля
Рис.
11.3. Зони частот збурення і довжин хвиль
нерівностей, що виникають з частоти
власних коливань і швидкості руху
автомобіля
Розглядання невеликих швидкостей руху і водночас малих довжин хвиль не є надто важливе, бо у випадку руху нормального автомобіля по нормальній дорозі коливання є невеликі і малопомітні. До цього ж при розгляданні малих нерівностей зауважимо, що шина не передає надто малих заглибин, а при зменшеній жорсткості шини також і виступів.
Опис нерівності дороги, тобто збурення одиночною синусоїдною функцією, можна розширити через впровадження періодичної функції нерівності дороги (рис. 11.4а). Можна її записати як суму синусоїдальних коливань
|
|
(11.6) |
Тож маємо не одну,
а більше амплітуд b1,
b2,
загалом
bn,
відповідних частотам
![]() при чому
при чому
|
|
(11.7) |
де X — відрізок шляху, що відповідає періоду нерівності. На підставі цього можемо визначити дискретний спектр амплітуд, в якому окремим частотам підпорядковано відповідні значення амплітуд (рис. 11.4б). Відповідно до цього
|
|
|
Рис. 11.4. Періодична функція нерівності дороги (а) і відповідний її дискретний спектр амплітуд (б) |

і за рівнянням
(11.5) на коливну систему рухомого зі
швидкістю v
автомобіля
водночас діють декілька збурень з
частотами
![]() .
За рис. 11.5а
різним частотам
.
За рис. 11.5а
різним частотам
![]() відповідають різні коефіцієнти підсилення
відповідають різні коефіцієнти підсилення![]() .
Вважаючи, що значення амплітуд збурення
є також різні, отримуємо відповідні
значення прискорень
.
Вважаючи, що значення амплітуд збурення
є також різні, отримуємо відповідні
значення прискорень![]() (рис. 11.5б).
(рис. 11.5б).
|
|
|
Рис. 11.5. Визначення амплітуд прискорень кузова: а — знаходження значень коефіцієнтів підсилення для дискретних значень частоти; б — які після множення на відповідні амплітуди нерівностей з рис. 11.4б дають амплітуду прискорень кузова |

Ці складені коливання з певними частотами і амплітудами дадуть, з врахуванням фазових кутів ψ1, ψ2, … ψn, перебіг прискорень кузова:
|
|
(11.8) |

Збурення за рівнянням (11.6), як і реакцію за рівнянням (11.8) можна подати в комплексному вигляді
|
|
(11.9) |
|
|
(11.10) |
Насправді нерівності дороги не є ні гармонічними, ні періодичними функціями, лише нерегулярними. Поза тим наші попередні міркування не є марними, бо дозволяють математично описати довільні нерівності.
Перехід від
періодичної функції до повністю
нерегулярної функції нерівності полягає
в тому, що можемо уявити довжину зони X
довільно великою, наслідком чого за
рівнянням (11.7) є щораз менший відступ
між частотами
![]() .
В граничному випадку, при нескінченій
величині зониX,
переходимо від дискретного спектру з
рис. 11.4б
до неперервного спектру, представленого
на рис. 11.6б.
Математично це означає перехід від
.
В граничному випадку, при нескінченій
величині зониX,
переходимо від дискретного спектру з
рис. 11.4б
до неперервного спектру, представленого
на рис. 11.6б.
Математично це означає перехід від
|
|
|
Рис. 11.6. Випадкова функція нерівності (а) і неперервний спектр амплітуд (б) |
суми ряду (11.9) до інтегралу
|
|
(11.11) |
Відповідно до цього коливання автомобіля дають також неперервні спектри. При такому ж як дотепер розгляді прискорень кузова отримуємо
|
|
(11.12) |
Часто вигідно описати функцію нерівності дороги через половинку синусоїди чи ступеневою функцією, що може відображати залізничний переїзд, покриття каналу чи бордюр (рис. 11.7). Однак надалі займатимемось загальним — випадковими нерівностями.
|
|
Рис. 11.7. Відображення окремих перешкод половинкою синусоїди (а) чи ступеневою функцією (б) |

11.2. Збурення від коліс і шин
Обертові частини автомобіля можуть спонукати коливання навіть під час руху по абсолютно рівній поверхні, тож, як прикладами, займемось колесами і шинами. Можна вирізнити три причини коливань:
а — неоднорідність будови шин;
б — биття коліс і шин;
в — неврівноваженість.
Вплив неврівноваженості є невеликим і тому малоістотним.
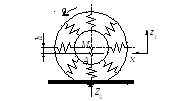
Неоднорідність будови шини можна собі уявити за допомогою моделі колеса з пружин (рис. 11.8). Між ободом колеса і протектором шини знаходяться елементарні пружини, які мають характеризувати пружні властивості шини. Якщо шина деформована на величину z1, заміряну на осі колеса, то між шиною і дорогою виникає сила
|
|
(11.13) |
де c1 є жорсткістю всіх елементарних пружин, що знаходяться в межах сліду
шини.
|
|
Рис. 11.8. Схематичне представлення неоднорідності будови шини за допомогою елементарних пружин |

При перекочуванні колеса на кут α сила Z залишається сталою доти, поки не зміниться жорсткість пружин. Якщо ж пружини мають неоднаковужорсткість, то при жорстко встановленій осі (z1 = const) сила Z буде змінюватись відповідно до зміни жорсткості пружин.
Цю зміну спрощено можна відобразити як на рис. 11.9 у вигляді синусоїди
|
|
(11.14) |
і силу
|
|
(11.15) |
|
|
|
|---|
 Рис.
11.9. Спрощене відображення змін
жорсткості шини при її коченні
Рис.
11.9. Спрощене відображення змін
жорсткості шини при її коченні
При коченні шини внаслідок неоднорідності її будови настають зміни сили, позначені як ZНО. З рівняння (11.15) випливає величина цих змін
|
|
(11.16) |
При розгляді
коливань істотним є не кут перекочування
шини α, а час t.
Використовуючи залежності
![]() і
і![]() для сталої швидкості руху, отримаємо
для сталої швидкості руху, отримаємо
|
|
(11.17) |
де частота збурення
|
|
(11.18) |
Вважатимемо тепер, що зміни тепер мають не синусоїдальний перебіг, а періодичний. Рівняння (11.14) можна узагальнити, як у випадку нерівності дороги в попередньому підрозділі (рівняння (11.6) і (11.9)), скориставшись рядом Фур’є
|
|
(11.19) |
де ψk є фазовим кутом між окремими гармонічними складовими. Отож зміна сили набуває вигляду
|
|
(11.20) |
Сумарна сила при
сталому положенні осі z1
із складовою статичного навантаження
![]() становить
становить
|
|
(11.21) |
Ефект „биття”
колеса можна пояснити на прикладі колеса
з однорідною шиною (![]() ),
в якому однак вісь обертання зміщена з
геометрич-ної середини M
на відстань
h
і проходить через точку A
(рис. 11.10).
),
в якому однак вісь обертання зміщена з
геометрич-ної середини M
на відстань
h
і проходить через точку A
(рис. 11.10).
|
|
Рис. 11.10. Представлення биття на прикладі колеса зі зміщенням h осі обертання відносно середини і спонуканих звідти змін навантажень колеса ZБ |
При усталеній відстані осі від поверхні (z1 = const) під час перекочування на кут α, пружини колеса стискаються і розпрямляються пропорційно до
|
|
(11.22) |
Спонукана биттям зміна навантаження колеса для сталої жорсткості c1 становить
|
|
(11.23) |
У випадку биття колеса чи його некруглості можна прийняти, що коливання відбуваються також з частотами 2·ω, 3·ω, … n·ω так, що hБ можна представити як функцію
|
|
(11.24) |
а зміну навантаження
|
|
(11.25) |
(βk — фазовий кут між окремими гармонічними складовими). Значення окремих гармонічних складових для k =1 і k =2 можна собі легко уявити за допомогою рис. 11.11.
|
|
|
Рис. 11.11. Биття колеса спричинене ексцентриситетом (а) та овальністю (б) |
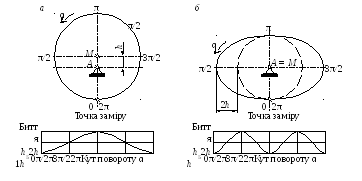
На рис. 11.11а представлене кругле колесо, встановлене на ложищі з ексцентриситетом. Биття колеса hБ в функції кута повороту колеса α дає синусоїдний перебіг з періодом 2π. На рис. 11.11б ложище знаходиться в центрі колеса, яке цього разу не кругле, а еліптичне. Биття колеса дає перебіг з періодом π і це означає, що частота збурення є вдвічі більша, ніж в попередньому випадку. Частоти збурення можуть бути і більші, якщо на шині є більше опуклостей.
Зміна сили, викликана неврівноваженням (рис. 11.12) і позначена ZНВ, для маси mНВ і відповідного її радіуса rНВ становить
|
|
(11.26) |
|
|
Рис. 11.12. Схематичне представлення неврівноваженості колеса і викликаної ним змінної сили ZНВ |
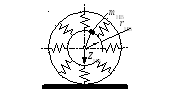
Вона росте з квадратом частоти збурення чи за рівнянням (11.18) швидкості руху, чого не було ні в рівнянні неоднорідності шини (11.20), ні в рівнянні биття колеса (11.25). В рівнянні (11.26) γ означає фазовий кут.
Сума цих трьох змінних сил характеризує загалом зміну радіальної сили
|
|
(11.27) |
чи з врахуванням (11.20), (11.25) і (11.26) в розгорнутому вигляді
|
|
(11.28) |
При експериментальному дослідженні шини отримуємо залежність як на графіку рис. 11.13, на якому вертикальне навантаження Z чи зміна радіальної сили ZR є функцією часу t. У випадку кочення ця функція є періодичною і її можна за допомогою гармонічного аналізу розкласти на окремі гармонічні складові і подати у вигляді
|
|
(11.29) |
|
|
Рис. 11.13. Перебіг періодичних змін радіальної сили колеса в функції часу при його коченні |
11.3. Вплив коливань на комфорт їзди
В підрозділі (10.3) при описі коливань автомобіля використовувались два критерії оцінки: прискорення і зміни навантаження коліс. Натомість в цьому розділі пізнаємо залежність комфорту їзди від прискорень.
У випадку вантажного транспорту нас здебільшого цікавлять великі значення прискорень, бо тільки такі можуть спричинити недопустиму деформацію чи знищення вантажу. Інші значення прискорень беруться до уваги, коли під час транспортування певну роль відіграє втомна міцність, що однак не трапляється часто.
Натомість людина є складною коливною системою і реагує не тільки на саму величину прискорень. Вона розрізняє також, з якою частотою і в якому напрямі прискорення діють на його тіло, причому відчуття стосовно напряму залежить також від положення тіла. Щодо впливу механічних коливань на людину проводились чисельні експерименти, результати одного з яких представлені на рис. 11.15. В процесі цього експерименту сидіння з черговою піддослідною особою примусово коливалось з різними частотами і амплітудами, причому коливання завжди мали вигляд однієї синусоїди. Піддослідні особи мусіли потім оцінити коливання за попередньо поданими ознаками. Графік (рис. 11.15) відображає прискорення сидіння в залежності від частоти при однаковому суб’єктивному відчуванні коливань.
Ці досліди не можуть бути без обмежень стосовно до коливань автомобілів, бо, як вже відмічалось в підрозділі 11.1 при обговоренні нерівності дороги, на людину не діє одиночне коливання, а сума нескінченно багатьох синусоїдних коливань. Тож потрібна міра, що дозволяє окреслити, в який спосіб змінюється відчування коливань, коли водночас на людину діють декілька частот. Для цього належить визначити K (рис. 11.15) для одиночних коливань, а потім утворити суму квадратів значень K.
|
|
(11.31) |
|
|
|
|
| |
|
| |

![]() Рис.
11.15. Ефективність дії K вертикальних
синусоїдних коливань на людину, що
сидить, в залежності від ефективної
величини прискорення і частоти збурення
Рис.
11.15. Ефективність дії K вертикальних
синусоїдних коливань на людину, що
сидить, в залежності від ефективної
величини прискорення і частоти збурення
Таке ствердження
рівнозначне з тим, що для відчування
коливань істотними є тільки амплітуда,
частота і напрям дії, а не фазовий кут
між одиночними коливаннями. Для
підтвердження цього були проведені
дослідження на рухомому автомобілі,
під час яких мірялись прискорення сидінь
піддослідних осіб і записувались їх
відчуття. На рис. 11.16 видно лінійну
залежність між суб’єктивною оцінкою
та ефективною величиною прискорень.
Для опису наявних в часі руху прискорень
застосовано статистичне усереднення,
так звана ефективна величина
![]() —середньо квадратичне
—середньо квадратичне
|
|
(11.32) |
 .
.
Її отримуємо з
запису прискорень в функції часу
![]() в проміжку часуT.
Результат настільки відповідає рівнянню
(11.31), що і при обчисленні середнього
квадратичного фазовий кут не відіграє
ролі.
в проміжку часуT.
Результат настільки відповідає рівнянню
(11.31), що і при обчисленні середнього
квадратичного фазовий кут не відіграє
ролі.
|
а — питання для піддослідних осіб (пасажирів легкового автомобіля); б — залежність між середньою оцінкою пасажирів і заміряною ефективною величиною прискорень сидіння, в різних автомобілях і на різних дорогах |
|
|---|
 Рис.
11.16. Залежність між суб’єктивною і
заміряною фізично оцінкою дії коливань:
Рис.
11.16. Залежність між суб’єктивною і
заміряною фізично оцінкою дії коливань:
Незалежно від цих загальних тверджень, що комфорт їзди можна оцінити на підставі величини прискорень, варто ще відмітити, як це випливає з інших досліджень, що людина значно гірше переносить коливання перпендикулярні до осі тіла, ніж паралельні коливання.
Частоти власних коливань тіла людини, що сидить, наведені в табл. 11.1.
Таблиця 11.1
Частоти власних коливань тіла людини
|
Система |
Напрям переміщень |
Частота власних коливань, Гц |
Примітки |
|
весь організм людини |
перпенди-кулярний |
4…6 |
головний резонанс |
|
11…15 |
невеликий резонанс не у всіх людей | ||
|
20…30 |
невеликий резонанс | ||
|
горизонта-льний |
2 резонанс, 1…3 |
резонанс властивий тільки голові, амплітуди однак менші ніж при 4…6 Гц | |
|
голова |
перпенди-кулярний |
4…6 |
протилежно до корпусу |
|
20 (…30) |
| ||
|
горизонта-льний |
1 2 |
протилежно до корпусу |
11.4. Навантаження, безпека руху
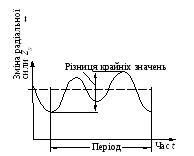
При русі по дорозі з нормальними нерівностями нерегулярний часовий перебіг мають також значення сил і напружень в елементах конструкції, відносні переміщення і швидкості між осями та кузовом, а також зміни динамічних навантажень коліс, які є одним з критеріїв оцінки безпеки руху. Замість розкладання часового перебігу на його складові з різними частотами, як це було зроблено в підрозділі 11.1 для нерівності дороги, і оцінки цих складових зокрема, як в підрозділі 11.3 при оцінці відчування коливань, розглядається частота появи окремих величин в часовому перебігу.
Прикладом може служити функція, позначена на рис. 11.17а Q(t), причому Q може бути в загальному випадку довільною величиною, що характеризує коливання. Аби для даної функції знайти ці частоти, проводяться паралельно до осі часу лінії зі сталим кроком ΔQ. Значення окремих ординат позначається Q1, Q2, загалом Qk. Тоді підраховуються точки перетину кривої Q(t) з лінією зі сталою ординатою Qk. Їх кількість, позначена через fk, наноситься на графік рис. 11.17б, що називається графіком кількості перевищень рівнів. Якщо це саме виконати з точками перетину інших паралельних, отримується розподіл кількості перевищень рівнів. Не буде це неперервна крива, бо маємо тільки скінчену кількість точок.
Для опису цього розподілу служать дві основні статистичні величини:
|
|
|
Рис. 11.17. Часовий перебіг коливань Q(t) і відповідний йому розподіл кількості перевищень рівнів |

середнє значення
![]() і дисперсія
і дисперсія![]() .
Середнє значення визначається як сума
добутків значень окремих рівнівQk
і кількості їх перевищень fk,
поділеної на суму всіх перетинів
.
Середнє значення визначається як сума
добутків значень окремих рівнівQk
і кількості їх перевищень fk,
поділеної на суму всіх перетинів
|
|
|
|
|
(11.33) |
Середнє значення можна записати коротше
|
|
(11.34) |
Не мусить воно бути ідентичним з найчастішим значенням, хіба у випадку симетричного розподілу.
Як видно на рис.
11.18 (для прозорості прийнято симетричний
розподіл і однакові кількості перетинів,
відповідних середньому значенню) при
однакових середніх значеннях
![]() розподіл кількості перевищень рівнів
може бути різним. У випадкуb
значення більші чи менші від
розподіл кількості перевищень рівнів
може бути різним. У випадкуb
значення більші чи менші від
![]() виступають частіше, ніж у випадкуa,
тож перебіг функції Q(t)
більше відбігає від
виступають частіше, ніж у випадкуa,
тож перебіг функції Q(t)
більше відбігає від
![]() у випадкуb,
ніж у випадку a.
Аби це виразити чисельно, визначається
відхилення від середнього значення як
дисперсія
у випадкуb,
ніж у випадку a.
Аби це виразити чисельно, визначається
відхилення від середнього значення як
дисперсія
|
|
(11.35) |
|
|
Рис.
11.18. Симетричні розподіли кількості
перевищень рівнів a
і b з однаковим середнім значеннями
|

Саме значення σQ називається середньоквадратичним відхиленням чи стандартним відхиленням. Показане воно на рис. 11.17б і рис. 11.18.
Тепер буде представлено застосування такого статистичного підходу до автомобілів на прикладі змін динамічних навантажень коліс. На підставі рівняння (2.2) [1] маємо
|
|
(11.36) |
Після підстановки у рівняння (11.35) отримуємо дисперсію
|
|
|
З результатів
замірів випливає однак, що статичне
навантаження
![]() найчастіше дорівнює середньому значенню
навантажень
найчастіше дорівнює середньому значенню
навантажень
|
|
(11.37) |
Тоді дисперсія набуває вигляду
|
|
(11.38) |
На вигляд рівняння (11.38) дуже подібне до (лінійного) середнього значення з рівняння (11.34). Різниця полягає на піднесенні до квадрату. В цей спосіб можна означити середньоквадратичне значення
|
|
(11.39) |
В застосуванні до рівняння (11.38) маємо
|
|
(11.40) |
Тож у випадку змін навантажень коліс середньоквадратичне значення дорівнює дисперсії.
З огляду на безпеку
руху та напруження в автомобілі і в
дорозі зміни навантажень коліс повинні
бути можливо малі, тобто мале повинно
бути
![]() .
.
Вплив його
абсолютного значення є залежним від
статичних коліс
![]() ;
наприклад стандартне відхилення порядку
;
наприклад стандартне відхилення порядку![]() у випадку вантажного автомобіля з
у випадку вантажного автомобіля з![]() погіршує безпеку руху незначно, тоді
як для легкового автомобіля з навантаженням
колеса 3 кН вже в істотний спосіб.
погіршує безпеку руху незначно, тоді
як для легкового автомобіля з навантаженням
колеса 3 кН вже в істотний спосіб.
Аби врахувати цей вплив при оцінці безпеки руху автомобіля, відноситься динамічне навантаження колеса до статичного
|
|
(11.41) |
Для конкретного
автомобіля статичне навантаження коліс
![]() змінюється разом з величиною вантажу.
Щоб добитись в наближенні однакової
безпеки руху, належить старатись, аби
змінюється разом з величиною вантажу.
Щоб добитись в наближенні однакової
безпеки руху, належить старатись, аби
|
|
(11.42) |
Звідси випливає, що у випадку порожнього автомобіля зміни навантажень коліс повинні бути менші, ніж у завантаженого автомобіля.
10.3. Автомобілі з простою підвіскою
Одномасова система може (за підрозділом III.1) вважатись частиною двомасової системи, яка достатньо добре описує коливні властивості автомобіля, чи бути стосовна до колісних тракторів чи будівельних машин, де рама жорстко з’єднана з мостами без жодних податних елементів.
В такий спосіб з
двомасової системи на рис. 10.10а
отримана одномасова система рис. 10.10б,
в якій тільки шина виконує функції
пружини і демпфера. Гасіння коливань в
цьому випадку спричинене внутрішнім
тертям в гумі, де
![]() ,
натомість
,
натомість![]() .
В наближенні на цій моделі можна
розглядати коливні властивості колісних
тракторів чи будівельних машин, які
рухаються найчастіше в умовах бездоріжжя.
.
В наближенні на цій моделі можна
розглядати коливні властивості колісних
тракторів чи будівельних машин, які
рухаються найчастіше в умовах бездоріжжя.
|
|
Рис. 10.10. Схеми коливних систем різних автомобілів: а — нормальний автомобіль; б — автомобіль без підвіски з еластичними шинами; в — автомобіль з підвіскою і жорсткими колесами |

Інша одномасова
система (рис. 10.10в),
отримана з двомасової системи на рис.
10.10а,
може вважатись замісною системою для
рейкового транспортного засобу. Тут
корпус вагона відносно осі колеса
підвішений пружно з демпфером, тоді як
колесо, що рухається по рейці, є жорстким.
При оцінці автомобіля, на підставі
частинного розв’язку гармонічно
вимушених коливань, визначається
коефіцієнт підсилення для прискорень
кузова
![]() і для змінних динамічних навантажень
колісZдин.
і для змінних динамічних навантажень
колісZдин.
Прискорення кузова
![]() ,
яке можна вважати мірою комфорту їзди
пасажирів, отримуємо з рівняння (10.26)
,
яке можна вважати мірою комфорту їзди
пасажирів, отримуємо з рівняння (10.26)
|
|
(10.31) |
Коефіцієнт
підсилення становить
![]() .
.
Динамічне
навантаження коліс є мірою безпеки
руху. Виразити його можна, вживши
комплексну амплітуду
![]() ,
формулою
,
формулою
|
|
(10.32) |
Коефіцієнт
підсилення тут рівний
![]() .
В таблиці 10.1 наведені коефіцієнти
підсилення для різних коливних систем
автомобілів, а також: асимптотичні
вирази для
.
В таблиці 10.1 наведені коефіцієнти
підсилення для різних коливних систем
автомобілів, а також: асимптотичні
вирази для![]() ,
частоти власних коливань, коефіцієнти
демпфування і деякі означення. Ці вирази
дійсні тільки тоді, коли колесо дотикається
поверхні дороги.
,
частоти власних коливань, коефіцієнти
демпфування і деякі означення. Ці вирази
дійсні тільки тоді, коли колесо дотикається
поверхні дороги.
Таблиця 10.1
Співставлення різних замісних коливних систем автомобіля
|
Коливна система |
|
|
|
|
|
Опис |
Без підвіски |
Пружність та демпфування між віссю та кузовом |
Без
підвіски
з пневматич-ними шинами
|
З
підвіскою і пневматичними шинами
|
|
Приклади застосуван-ня |
Гужовий транспорт |
Рейковий і гужовий транспорт |
Кол. трактори, гужовий транс-порт, будівель-ні машини |
Практично всі дорожні автомобілі |
|
Коефіцієнт підсилення для приско-рень кузова (ω2·a2 /b)2 |
|
|
|
|
|
Асимптота
|
|
|
|
0 |
|
Коефіцієнт підсилення для динаміч-них наванта-жень коліс (aZ /b)2 |
|
|
|
|
|
Асимптота
|
|
|
|
|
|
Окремі позначення |
|
|
|
|











В таблиці використані такі загальні позначення:
— відношення частот
|
|
|
— частоти вільних коливань
|
|
|
— безвимірний коефіцієнт демпфування
|
|
|
— відношення мас
|
|
|
Перебіг коефіцієнтів підсилення для прискорень кузова і динамічних навантажень коліс в функції частоти збурення ω у випадку автомобілів Б і В представлений на рис. 10.11. Для порівняння наведений також автомобіль А без податних і демпфувальних елементів. Такий автомобіль підлягає, вже при малих частотах збурення, значним прискоренням і динамічним навантаженням коліс. Криві на графіку прямують до нескінченості, що в дійсності не відбувається, бо раніше колеса відриваються від поверхні.
Автомобіль Б є виразно кращий і може рухатись з більшими швидкостями. (В такий спосіб з повільного гужового транспорту розвинулись швидші ресорні екіпажі).
Автомобіль В, обладнаний тільки пневматичними шинами, проявляє при великих частотах збурення менші прискорення і навантаження коліс, ніж автомобіль Б. Значення коефіцієнтів підсилення для ω → ∞ не прямують до нескінченості, а лише асимптотично наближаються до певного сталого значення. Це виникає від різниці між гідравлічним демпфером і гумою, тобто між k = const і k ω = const. У випадку гідравлічного амортизатора сила демпфування росте з частотою до нескінченості, натомість при демпфуванні в гумі, чи загалом при демпфуванні внутрішнім тертям матеріалу, вона набуває сталого значення. Однак автомобіль не надається до руху з великою швидкістю, бо в проміжку частот близьких до частоти власних коливань коефіцієнти підсилення досягають великих екстремальних значень. З цієї причини належить застосовувати мале демпфування в шині, яке не можна збільшувати ще й з огляду на зростання опору кочення. Частота власних коливань автомобіля В є більша, ніж автомобіля Б, бо жорсткість шин є приблизно в 10 раз більша, ніж жорсткість пружин підвіски автомобіля Б.
|
|
|
|
Автомобіль А: m3,1 + mк = 1432 кг
Автомобіль Б: m3,1 = 1275 кг mк = 157 кг c3,1 = 1589 Н/см k31 = 61,6 Н·с/см
Автомобіль В m1 + m3,1 = 1432 кг c1 = 5562 Н/см k1·ω = 556,2 Н/см
| |

Рис. 10.11. Резонансні характеристики для прискорень кузова і динамічних навантажень коліс для автомобілів А, Б і В з таблиці 10.1Частоту власних коливань автомобіля В
|
|
(10.33) |
можна подати у вигляді
|
|
(10.34) |
підставляючи
![]() за рівнянням (2.15) [1]
і
за рівнянням (2.15) [1]
і![]() .
Якщо виразити частоту в Гц і прискорення
земного тяжіння g = 981 см/с2,
то з рівняння (10.34) отримуємо
.
Якщо виразити частоту в Гц і прискорення
земного тяжіння g = 981 см/с2,
то з рівняння (10.34) отримуємо
|
|
(10.34а) |
Підстановка до рівняння значень s ≈ (1,7…1,9) см дає ν/(2·π) ≈ (3,8…2,9) Гц.
Обладнання автомобіля пневматичними шинами найчастіше має ціллю не стільки зменшення коливань, як оберігання поверхні дороги шляхом зменшення тиску в контакті на відміну від жорстких коліс, а також зменшення опору кочення внаслідок меншого заглиблення коліс.
Далі на рис. 10.12 показано, в який спосіб добором даних автомобіля Б можна змінити параметри його коливань. Ці міркування є вступом до подальшого обговорення коливань в розділі 12.
При сталих значеннях c1, m3,1 і mк та змінному коефіцієнті демпфування D2 рис. 10.12а прискорення і навантаження коліс будуть в проміжку резонансу менші для більших D3,1, тобто вигідніші, натомість при вищих значеннях ω — будуть більші і погіршуватимуть в такий спосіб комфорт їзди. Тож слід зважитись на компроміс і застосовувати D3,1 = 0,25…0,30.
При змінній жорсткості c2, відповідно змінній частоті власних коливань ν2 (10.18б), прискорення кузова і навантаження коліс будуть для тих частот збурення менші при меншій жорсткості пружини, що тягне за собою покращення комфорту їзди і безпеки. Зменшення динамічних навантажень коліс є для великих частот менше, ніж зменшення прискорень кузова, тож зменшення жорсткості підвіски c3,1 більше поправляє комфорт, ніж безпеку руху.
За рис. 10.12в зі зростанням маси кузова m3,1 зменшується його прискорення. Підтверджує це відомий факт, що комфорт їзди порожнім автомобілем є меншим, ніж завантаженим. Динамічне навантаження коліс залишається без змін, натомість безпека руху — ні. Випливає це з рівняння (2.3) [1]. Відношення динамічного навантаження до статичного
|
|
(10.35) |
буде більше для меншого Zстат і означає, що порожній автомобіль є менш безпечний, ніж завантажений, бо колеса мають більшу тенденцію до
|
|
|
Рис. 10.12а,б. Вплив зміни даних автомобіля Б на перебіг резонансних характеристик прискорень кузова і динамічних навантажень коліс (дані за рис. 10.11) |

|
|
|
Рис. 10.12в,г. Вплив зміни даних автомобіля Б на перебіг резонансних характеристик прискорень кузова і динамічних навантажень коліс (дані за рис. 10.11) |

відривання від дороги.
Як четверта і остання змінювана величина є маса коліс. Чим легше є колесо (рис. 10.12г), тим менше навантаження поверхні. За таблицею 10.1 прискорення не змінюється доти, поки колесо не відривається від поверхні.
Некорисна риса автомобіля Б, як значний ріст прискорень і навантажень коліс при більших значеннях ω, залишається надалі мимо змінюваних величин.
В таблиці 10.2 представлені 4 можливі вирішення цього недоліку, позначені від Б1 до Б4 і для порівняння нормальний автомобіль Б.
Таблиця 10.2
Співставлення одномасових коливних систем з різними видами демпфування і різними способами встановлення демпферів, відповідні коефіцієнти підсилення для прискорень кузова і динамічних навантажень коліс та застосовані позначення
|
Коливна система |
|
|
|
|
Опис |
Нормальна |
Демпфування в гумі |
Додаткова пружина |
|
Коефіцієнт підсилення для приско-рень кузова (ω2·a2 /b)2 |
|
|
|
|
Граничне
зна-чення приско-рень кузова
|
∞ |
|
|
|
Коефіцієнт підсилення для динаміч-них наванта-жень коліс (aZ /b)2 |
|
|
|
|
Окремі позначення |
|
|
|
|
Позначення нового без-вимірного коефіцієнта демпфування |
|
|
|









Загальні позначення в таблиці:
|
|
Продовження таблиці 10.2
|
Коливна система |
|
|
|
Опис |
Додаткова пружина |
Додаткова пружина |
|
Коефіцієнт підсилення для приско-рень кузова (ω2·a2 /b)2 |
|
|
|
Граничне
зна-чення приско-рень кузова
|
|
|
|
Коефіцієнт підсилення для динаміч-них наванта-жень коліс (aZ /b)2 |
|
|
|
Окремі позначення |
|
|
|
Позначення нового без-вимірного коефіцієнта демпфування |
|
|








У випадку Б1 замість гідравлічного демпфера застосоване демпфування внутрішнім тертям в гумі. Подальші дві системи мають додаткові пружини, завдяки яким при більших частотах гідравлічний демпфер не діє сповна. При нескінченно великих частотах він веде себе як жорстке тіло.
Автомобілі Б2, Б3,
Б4 мають відносно автомобіля Б1 ту
перевагу, що в них можуть бути застосовані
довільно жорсткі демпфери, тоді як у
випадку демпфування в гумі можливим до
реалізації є тільки коефіцієнт демпфування
![]() .
.
Таблиця 10.2 містить
коефіцієнти підсилення для прискорень
кузова і навантажень коліс, а також
граничні значення прискорень при
![]() .
.
На рис. 10.13 і 10.14 представлені, отримані на підставі коефіцієнтів підсилення, амплітудно-частотні характеристики автомобілів від Б1 до Б4 і для порівняння — автомобіля Б. З рис. 10.13 видно, що гумовий демпфер дає
|
|
|
|
Автомобіль Б: дані за рис. 10.11
Автомобіль Б1: дані як для Б за винятком
| |

Рис. 10.13. Вплив
виду демпфування на перебіг резонансних
характеристик: автомобіль Б — демпфування
пропорційне до швидкості
![]() ,
автомобіль Б1 — демпфування внутрішнім
тертям
,
автомобіль Б1 — демпфування внутрішнім
тертям![]()
|
|
|
|
Автомобіль Б: дані за рис. 10.11
Автомобіль Б2: дані як для Б за винятком
Автомобіль Б3, Б4: дані як для Б за винятком
| |

Рис. 10.14. Вплив застосування керування роботою амортизатора через пружину на перебіг резонансних характеристик
зменшення прискорень
кузова і навантажень коліс. Однак
підставлене
![]() ,
як вже було зазначено, неможливо
реалізувати, тож автомобіль Б1 в дійсності
не буде таким добрим. Амплітуди в зоні
резонансу будуть, як випливає з рис.10.12а,
більші, ніж у випадку автомобіля Б.
Автомобілі від Б2 до Б4, амплітудно-частотні
характеристики яких з рис. 10.14 не
проявляють жодних значних відмінностей,
мають, як можна було сподіватись, менші
амплітуди для великих частот і більші
— в зоні резонансу.
,
як вже було зазначено, неможливо
реалізувати, тож автомобіль Б1 в дійсності
не буде таким добрим. Амплітуди в зоні
резонансу будуть, як випливає з рис.10.12а,
більші, ніж у випадку автомобіля Б.
Автомобілі від Б2 до Б4, амплітудно-частотні
характеристики яких з рис. 10.14 не
проявляють жодних значних відмінностей,
мають, як можна було сподіватись, менші
амплітуди для великих частот і більші
— в зоні резонансу.
10.4. Коливна система коліс
В підрозділі III.1 на рис. III.3б представлена інша одномасова система. Так звана коливна система коліс є другою, обіч розглянутої вже в підрозділах 10.1—10.3, частинної системи, складеної з двох пружно з’єднаних мас (див. рис. III.4). Обчислення, пов’язані з власними і вимушеними коливаннями системи коліс, виконуються аналогічно, як в підрозділах 10.1, 10.2. Тільки в цьому випадку потрібно врахувати, як на рис. 10.15, дію на масу колеса m1 двох сил пружності і двох сил демпфування. Верхня пружина і верхній
|
|
Рис. 10.15. Одномасова коливна система колеса масою m1, жорсткістю шини с1, сталою демпфування k1·ω, жорсткістю підвіски с3,1, коефіцієнтом демпфування підвіски k3,1 |

демпфер зі сталими с3,1 і k3,1 відповідають таким же елементам з рис. 10.1. Нижня пружина жорсткістю с1 і демпфер з коефіцієнтом демпфування k1 відображають властивості шини, за посередництвом якої система є спонукана до коливань через функцію збурення h.
Як важливу величину, належить запам’ятати частоту власних негашених коливань
|
|
(10.36) |