

7.2. Максимальна швидкість на горизонтальній дорозі
Максимальну
швидкість на горизонтальній дорозі
визначає точка перетину кривих опорів
руху при i
= 0 (і
![]() )
з характеристикою постачання (на останній
передачі) на рис. 7.3а
і б.
vmax
можна також обчислити з виразу для
тягової сили:
)
з характеристикою постачання (на останній
передачі) на рис. 7.3а
і б.
vmax
можна також обчислити з виразу для
тягової сили:
|
|
(7.11) |
якщо відомі всі необхідні дані двигуна і автомобіля, або з рівняння потужності:
|
|
|
|
|
(7.12) |
Для конструкційної концепції нового автомобіля важливим є зворотний випадок обчислень, тобто, знаючи дані автомобіля і початково заплановану максимальну швидкість, належить визначити дані двигуна та перетворювача характеристики.
За спрощеного (переважно без врахування проковзування) розгляду потужність двигуна Nд при vmax становить:
|
|
(7.13) |
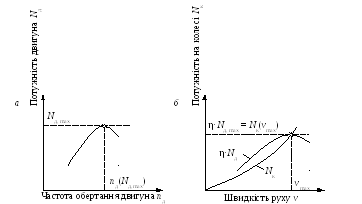
Отож, якщо двигун вибиратиметься на підставі підрахованої потужності і відповідно його крива характеристики повного навантаження оцінюватиметься за підрозділом 6.4, то потужність Nд(vmax) (рис. 7.7а) віддаватиметься за певної, визначеної частоти обертання — nд(vmax). Зв’язок між тою частотою обертання і швидкістю руху виникає з рівнянь (7.3) та (5.48)
|
|
(7.14) |
З цього рівняння вираховується передатне відношення u, яке є найменшим передатним відношенням
|
|
(7.15) |
Визначивши umin та вже знаючи (чи попередньо задаючи) коефіцієнт корисної дії η, можна перенести криву характеристики повного навантаження з рис. 7.7а на рис. 7.7б.
|
|
|
Рис. 7.7. Визначення максимальної швидкості руху vmax: а — зовнішня характеристика потужності двигуна Nд в функції частоти обертання nд; б — потужність постачання на колесі η∙Nд і потужність споживання опорів Nк в функції швидкості руху |

На завершення можна було би виконати обчислення за точними рівняннями, що враховують дані шин. Однак відхилення будуть незначними, бо окружна сила при максимальній швидкості є звичайно досить мала і звідти проковзування, викликане нею, є незначне.
Взаємне підпорядкування максимальної швидкості, потужності двигуна і мінімального передатного відношення вдається легко визначити в особливому випадку, в якому крива зовнішньої характеристики двигуна перетинається з кривою опорів в точці максимальної потужності Nд, max (рис. 7.8б). Тоді
|
|
(7.16) |
а відповідна максимальній швидкості частота обертання
|
|
(7.17) |
|
|
|
Рис. 7.8. Особливий випадок на рис. 7.7 — швидкість руху vmax при максимальній потужності двигуна Nд, max |
Окрім згаданого особливого випадку, позначеного на рис. 7.9 цифрою 1, розглянемо подальші два більш загальні випадки.
|
|
|
|
Рис. 7.9. Максимальна швидкість за різних передатних відношень приводу: 1 — vmax при Nд, max; 2 — vmax вище Nд, max; 3 — vmax нижче Nд, max |
Рис. 7.10. Вплив стану завантаження автомобіля на максимальну швидкість |


Випадок 2: максимальна швидкість досягається при частоті обертання двигуна більшій від частоти обертання максимальної потужності nд(Nд, max). Отримана максимальна швидкість руху vmax є меншою ніж у випадку 1, але при v < vmax виступає більший надлишок потужності, покращується здатність долання підйомів чи здатність прискорення (див. підрозділи 7.3 і 7.4).
Випадок 3: максимальна швидкість досягається при частоті обертання двигуна меншій від частоти обертання максимальної потужності. При vmax двигун працює на меншій частоті обертання, що оберігає його. Звідси відповідне передатне відношення називаємо надпередачею або економічною передачею, бо зменшується витрата палива (див. підрозділ 7.5). Істотним недоліком є брак надлишку потужності і тому такий добір передатного відношення зберігся тільки як комбінація випадків 1 і 3, що уможливлює використання економічної передачі під час нормального руху, а при розгоні — безпосередньої передачі, що відповідає випадку 1.
Згадані різні випадки, що визначають vmax, трапляються в експлуатації автомобілів ще й тому, що криві опорів (рис. 7.10) можуть пересуватись в залежності від ступеня завантаження автомобіля, а у випадку вантажівок
додатково може змінитись cx∙A.
Частина III. Коливання автомобіля
Займемося тепер вертикальними переміщеннями і поздовжнім колисанням автомобіля, тобто переміщеннями в напрямі осі z і обертальним рухом навколо осі y. Обидва рухи описують коливання автомобіля.
Коливання здебільшого виступають під час руху по нерівній дорозі. Вони спричинюють зміщення пасажирів внаслідок струсів, а також довантаження автомобіля і дороги понад статичне навантаження. Через зміну вертикального навантаження коліс коливання теж впливають на безпеку руху, особливо, коли величина вертикальної сили спадає до нуля і між колесом та дорогою не передається жодна горизонтальна сила.
III.1. Замісна коливна система автомобіля
Передусім належить вибрати замісну систему якомога відповіднішу дійсності. Відносно просту модель, але вже незвичайно ускладнену при розрахунках, подано на рис. III.1. Кузов автомобіля масою m3 і, істотним тут,
|
|
Рис. III.1. Проста замісна коливна система для чотириколісного автомобіля |

моментом інерції відносно поперечної осі автомобіля I3y опирається на колеса за посередництвом чотирьох пружин з паралельно добавленими чотирма амортизаторами. Кожне колесо масами m1 і m2 контактує з нерівною поверхнею через шини з певною пружністю та демпфуванням. Маса m4 представляє, наприклад, масу сидіння і пасажира, з’єднану з кузовом за посередництвом пружності і демпфування сидіння. Ця система має вже 7 степенів вільності: 2 для кузова, 4 для чотирьох коліс і 1 для пасажира. Для кожного наступного пасажира степінь вільності зростає на 1.
Однак в такий спосіб не є описана вся коливна система автомобіля. Кузов, наприклад, може бути поділеним на окремі маси. Рама і кузов можуть бути відділені гумовими пружними елементами. У вантажівках кабіна водія часто з’єднана з рамою елементами з певною пружністю та демпфуванням. До того ж агрегати системи приводу (двигун, коробка передач) монтуються до рами через гумові елементи. Коливна система автомобіля є надто ускладнена, бо має багато степенів вільності, тож аналіз коливань автомобіля не є легким з огляду на значну кількість диференціальних рівнянь.
Аби зорієнтуватись в способі підходу до коливань, почнемо з простої системи є одномасової системи (рис. III.2а), яка складається з однієї маси,
|
|
|
|
Рис. III.2. Замісна одномасова система: а — для частини кузова; б — для осі |
Рис. III.3. Система двох мас, сполучених пружинами і демпферами, як модель частини кузова і осі |


пружини і демпфера. Інша проста система показана на рис. III.2б. Відповідати вона може коливній системі коліс за умови, що кузов є нерухомий. Сполучення двох систем з рис. III.2 дає схему частини автомобіля як систему двох спряжених мас за допомогою пружин і демпферів. Верхня маса є частиною кузова, а нижня — відповідає одній з осей (рис. III.3).
Система з чотирма степенями вільності показана на рис. III.4а. Вона
|
|
|
Рис. III.4. Плоска замісна коливна система двовісного автомобіля: |

представляє автомобіль на вигляді збоку при умові, що нерівності дороги однакові для лівого і правого коліс, а автомобіль є симетричний відносно поздовжньої осі, тобто не виконує жодних бічних рухів, а тільки вертикальні коливання і поздовжнє колисання.
Верхній прямокутник відображає масу кузова m3 з моментом інерції I3y відносно осі y, що проходить через центр мас ЦМ3. Сумарна маса обох передніх коліс становить m1, а обох задніх — m2. Аналогічно, подані на рисунку пружини і демпфери, охоплюють відповідні елементи кожної осі. Систему на рис. III.5а можна уподібнити до двомасової системи на рис. III.4, розділивши масу кузова на три маси (рис. III.5б):масу m3,1 над передньою віссю, масу m3,2 над задньою віссю і масу спряження mс, зосереджену в центрі мас ЦМ3. Ці три маси жорстко з’єднані невагомою балкою, а їх величина виникає з таких умов:
1) сумарна маса повинна залишатись сталою
|
|
(III.1) |
2) центр мас повинен залишатись в тому ж місці:
|
|
(III.2) |
3) незмінною повинна бути величина моменту інерції:
|
|
(III.3) |
де i — радіус інерції.
Тож три зосереджені маси становлять:
|
|
(III.4) |
Значення маси спряження наглядно можна представити в такий спосіб. В особливому випадку, коли mс = 0, переміщення мас m3,1 і m3,2 над передньою та задньою осями взаємонезалежні. Натомість при mс ≠ 0 рухи обох мас впливають на себе, тобто при ударі в передню вісь рухатись буде, як попередньо, маса m3,1, так і маса m3,2. Подібність між чотиримасовою і двомасовою системами є дуже виразна при mс = 0, що, як показують експерименти, є близьким до дійсності для легкових автомобілів. Тож кожну вісь можна розглядати окремо, якщо нас цікавлять тільки винятково переміщення мас m3,1 і m3,2, а не точок між ними.