

Демодулятора Тогда
![]() .
.
Для заданных а, и порога стирания вероятность стирания единичного элемента
![]() .
.
Вероятность
ошибки является функцией а
или (и) .
Вероятность стирания зависит еще и от
порога Δ. Определяя на интервале анализа
в N
элементов число стираний v,
можно найти оценку для вероятности
стирания элемента
![]()
![]() и из уравнения для заданных значений
и
определить а.
Подставив найденное значение а
в выражение для
и из уравнения для заданных значений
и
определить а.
Подставив найденное значение а
в выражение для
![]() ,
определим вероятность ошибки
,
определим вероятность ошибки
![]() .
.
Данные
о числе стираний на интервале анализа
можно также использовать для разделения
состояний канала. Пусть канал находится
в одном из L
состояний, каждое из которых характеризуется
вероятностью ошибки на элемент
![]() .
Положим также, что стирания независимы.
Тогда вероятность того, что на интервале
передачи N
единичных элементов число стираний для
1-го состояния канала равно v,
определяется формулой
.
Положим также, что стирания независимы.
Тогда вероятность того, что на интервале
передачи N
единичных элементов число стираний для
1-го состояния канала равно v,
определяется формулой
![]() ,
,
где
![]() – вероятность стирания элемента дляi-ro
состояния канала.
– вероятность стирания элемента дляi-ro
состояния канала.
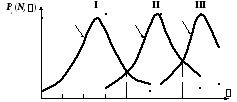
Типичные графики зависимости P(i)(N, v) в случае, когда канал может находиться в одном из трех состояний, приведены на рис. 1.7.
![]()
![]()
![]()
Рисунок 1.7 – Вероятности ошибок для трех состояний канала
Графики
соответствуют случаю 1
< 2
< 3.
Из графиков следует, что если число
стираний v
= 3, то наиболее вероятно, что канал
находится в состоянии I (вероятность
ошибки равна
![]() ,
так какP(1)(N,
3)>P(2)(N,
3)>P(3)(N,
3)). При числе стираний v
= 5 целесообразно считать, что канал
находится в состоянии II.
,
так какP(1)(N,
3)>P(2)(N,
3)>P(3)(N,
3)). При числе стираний v
= 5 целесообразно считать, что канал
находится в состоянии II.
Таким образом, полагаем, что первому состоянию соответствует 0 ≤ v ≤ 4, второму – 5 ≤ v ≤ 8 и третьему – 9 ≤ v ≤ N. При использовании данного метода оценки качества канала, как и любого другого, возможно вынесение неправильного решения о том, в каком состоянии находится канал. Например, если при v = 4 выносится решение о том, что канал находится в состоянии I, то на самом деле он, правда, с меньшей вероятностью, мог находиться и в состоянии II и даже III. Для оценки качества разделения состояний канала можно использовать матрицу ij, где ij – вероятность принятия решения о том, что канал находится в j-м состоянии, когда в действительности имеет место i-е состояние.
При разделении трех состояний канала
 ,
,
где
![]() ;
;
![]() .
.
Идеальное разделение состояний канала соответствует случаю, когда 11 = 22 = 33 = 1, а все остальные элементы матрицы равны нулю. Разумеется, обеспечить такое разделение невозможно. При описании состояний канала более трех с помощью матриц – занятие весьма трудоемкое и требующее больших вычислительных и программных средств.
Рассмотренные методы оценки качества каналов далеко не исчерпывают всех возможных, описанию которых посвящено немало статей и моногра-фий [2, 3].
По месту включения устройств контроля различают адаптивные системы ПД с устройствами контроля, включаемыми в различных частях тракта передачи данных. Чаще всего устройства контроля включаются на приеме системы ПД и информация о результатах контроля (в случае необходимости) посылается по каналу обратной связи на передающий конец.
По времени анализа состояния канала различают системы ПД с постоянным и переменным временем анализа. В последнем случае интервал анализа зависит от качества канала, при этом, чем больше коэффициент ошибок, тем быстрее можно вынести решение о качестве канала. Использование переменного времени анализа позволяет сократить среднее время, затрачиваемое на вынесение решения о качестве канала.
Контроль может осуществляться с целью вынесения решения о качестве канала только на интервале контроля. Это так называемый текущий контроль. Его можно трактовать как контроль качества сигнала. Примером такого контроля является определение применительно к каждой кодовой комбинации правильности ее приема. Контроль может производиться также с целью определения качества канала на участке стационарности по результатам измерений на интервале времени, существенно меньшем, чем интервал стационарности. При этом задачей контроля является прогнозирование состояния канала.
Если текущий контроль, как правило, предназначен для улучшения условий приема сигнала, по результатам анализа которого вынесено решение о его качестве, то прогнозирование направлено на изменение в системе ПД, обеспечивающее требуемые качественные показатели системы после принятия решения.
Использование результатов контроля. По результатам контроля могут меняться параметры устройства преобразования сигналов (УПС) или устройства защиты от ошибок (УЗО) либо обоих устройств одновременно. По сути УПС является модемом, поэтому далее будем называть данное устройство в современной терминологии “модем”. При адаптации на уровне УЗО различают: адаптивное кодирование и адаптивное декодирование. При адаптивном кодировании в соответствии с состоянием канала меняется структура кода – соотношение между числом информационных и проверочных элементов, длина блока и т. п. Вариантом простейшего адаптивного кодирования является повторение кодовой комбинации при обнаружении в ней ошибки. Системы, в которых повторение кодовых комбинаций происходит при обнаружении в них ошибок, относятся к системам с обратной связью (ОС). Эти системы чаще всего применяются на практике, поэтому подробно рассматриваются ниже.
Если при неадаптивном декодировании решение о виде передаваемой кодовой комбинации принималось на приеме однозначно, так как каждому синдрому («указателю») приписывалось одно, наиболее вероятное сочетание ошибок, то при адаптивном декодировании каждому синдрому соответствует N вариантов сочетания ошибок, где N – число состояний канала. Таким образом, решение о принимаемой комбинации для одного и того же синдрома зависит от состояния канала.
Так как при вынесении решения о состоянии канала возможны ошибки, то и оптимальное решение о кодовой комбинации может быть принято с вероятностью, отличной от единицы и зависящей в свою очередь от качества работы устройства контроля качества канала (сигнала).
Обобщенная структурная схема системы передачи данных (ПД) с обратным каналом изображена на рис. 1.8, где обозначено: ИС, ПС – источник и получатель информации; ПС1, ПС2 – преобразователи сообщений и сигналов; КУ, ДКУ – кодирующее и декодирующее устройства; М – модем на передаче и приеме; ГВЧ – генератор высокочастотных колебаний; ЛС – линия связи; ЛТП – линейный тракт приемника; ПРС, ПМС – передатчик и приемник рабочих сигналов; РУ, АУ – решающее и анализирующее устройства; ПРК, ПМК – передатчик и приемник командных сигналов.

Рисунок 1.8–Система передачи данных с обратным каналом
Тракт, соединяющий ИС с ПС, образует прямой канал связи. Тракт, соединяющий ПРК с ПМК, образует обрaтный канал, предназначенный для передачи информации о состоянии прямого канала и управления ПРС. При постоянных параметрах прямого канала и идеальной (безошибочной и безынерционной) обратной связи можно обеспечить скорость передачи информации, близкую к пропускной способности канала при заданном качестве (верности) связи. Качественными показателями служат, например, вероятность ошибки дискретного канала (ДК) и вероятность необнаруженной ошибки в ДКУ. Наличие помех и запаздывание сигналов снижают качество регулирования потока информации в прямом канале. Несмотря на это, технические показатели систем связи с обратным каналом часто оказываются лучше, чем для систем связи одностороннего действия (симплексный режим работы).
Различают обратную связь до принятия решения и после принятия решения. В первом случае петля обратной связи (цепь 1 на рис. 1.8) непосредственно охватывает линию связи и обеспечивает контроль ее состояния. В результате сравнения принятого колебания с некоторым пороговым значением делается вывод о качестве линии связи и по обратному каналу посылается команда, в соответствии с которой изменяются параметры передаваемых рабочих сигналов. Такой принцип используется, например, в системах метеоритной связи и др.
В дальнейшем будем называть их системами с автоматическим регулированием параметров (АРП). Заметим, что сам термин “обратная связь до принятия решения” условный и означает лишь тот факт, что команда формируется без использования статистических критериев оценки параметров сигнала.
Во втором случае петля обратной связи охватывает значительно больший участок прямого канала (цепь 2 на рисунке 1.8). На основании решения, принимаемого с использованием статистических критериев, производится повторная передача искаженных сигналов. Поэтому такие системы будем называть системами с автоматический повторением сигналов (АПС).
Процедура
регистрации сообщений в системах АПС
заключается в следующем. Решение о
регистрации сигнала
![]() в виде сообщения
в виде сообщения![]() выносится в том случае, если принятое
колебание
выносится в том случае, если принятое
колебание![]() удовлетворяет заданному статистическому
критерию. В противном случае сигнал
удовлетворяет заданному статистическому
критерию. В противном случае сигнал![]() ,
отображающий сообщение
,
отображающий сообщение![]() ,
повторяется. При этом символ
,
повторяется. При этом символ![]() отображается на приемном конце двумя
сигналами –
отображается на приемном конце двумя
сигналами –![]() и
и![]() ,
– совокупность которых можно рассматривать
как укрупненный сигнал
,
– совокупность которых можно рассматривать
как укрупненный сигнал![]() ,
который и подвергается проверке на
достоверность. При удовлетворении
критерия решения фиксируется символ
,
который и подвергается проверке на
достоверность. При удовлетворении
критерия решения фиксируется символ![]() ,
при несоблюдении критерия решения
сигнал
,
при несоблюдении критерия решения
сигнал![]() передается снова и проверяется укрупненный
сигнала
передается снова и проверяется укрупненный
сигнала![]() и т. д.
и т. д.
Подчеркнем
принципиальное отличие метода АПС от
метода повторения сигналов с
мажоритарной обработкой (МПС). При МПС
каждый сигнал независимо от состояния
канала повторяется заранее установленное
число
![]() раз, образуя укрупненный сигнал
раз, образуя укрупненный сигнал![]() .
При АПС повторяются не все, а только
недостоверные сигналы, причем
коэффициент повторения
.
При АПС повторяются не все, а только
недостоверные сигналы, причем
коэффициент повторения![]() является случайной величиной,
математическое ожидание которой
является случайной величиной,
математическое ожидание которой![]() может быть меньше
может быть меньше![]() при одинаковом качестве связи. Это
означает, что при равной помехоустойчивости
возрастает средняя скорость передачи
информации и уменьшаются затраты энергии
на передачу одного бита информации.
Таким образом, при АПС реализуется
последовательный анализ, когда по
совокупности принятых сигналов
при одинаковом качестве связи. Это
означает, что при равной помехоустойчивости
возрастает средняя скорость передачи
информации и уменьшаются затраты энергии
на передачу одного бита информации.
Таким образом, при АПС реализуется
последовательный анализ, когда по
совокупности принятых сигналов![]() ,
число
,
число![]() которых заранее не фиксировано, а зависит
от исходов предыдущих проверок,
принимается одно из двух возможных
решений – отождествлять сигнал
которых заранее не фиксировано, а зависит
от исходов предыдущих проверок,
принимается одно из двух возможных
решений – отождествлять сигнал![]() с символом
с символом![]() либо добавить к
либо добавить к![]() еще один сигнал и продолжать процесс
решения и т. д.
еще один сигнал и продолжать процесс
решения и т. д.