

Структурные схемы и алгоритмы работы адаптивных систем
2.1 Система с рос и ожиданием решающего сигнала
Структурная схема системы с РОС и ожиданием решающего сигнала (РОС-ОЖ) представлена на рис. 2.1, а алгоритм функционирования – на рис. 2.2. Работает система следующим образом.
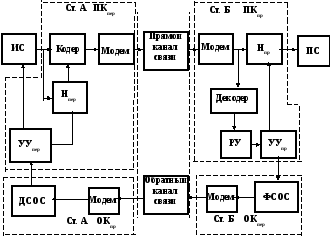
Рисунок 2.1 – Структурная схема системы ПД с РОС-ОЖ
По сигналу управляющего устройства передатчика (УУпер) прямого канала (ПКпер) источнику сообщений (ИС) посылается сигнал готовности аппаратуры к передаче данных (А1). По этому сигналу ИС выдает один очередной информационный блок сообщения, который поступает в кодер и накопитель передачи (Нпер) передатчика (ПКпер) (А2). Накопитель Нпер служит для запоминания одного передаваемого информационного блока с целью возможности его повторения, если придет сигнал «Переспрос» по обратному каналу. Кодер в процессе кодирования добавляет к передаваемым информационным разрядам проверочные разряды, полученные по законам формирования разрешенных комбинаций применяемого избыточного кода, например циклического (A3). Пройдя через модем ПКпер, дискретные сигналы приобретают вид, удобный для передачи по используемому каналу связи. Если последний является каналом ТЧ, то сигнал на выходе модема имеет вид модулированного колебания (А4).
В приемнике прямого канала ПКпр сигнал после обратного преобразования в модеме (А5) появится через соответствующее время распространения tp. Информационная часть блока или кадра записывается в Нпр прямого канала (А6), и одновременно этот кадр поступает в декодер приемника прямого канала, с помощью которого оценивается правильность принятого кадра. Решающее устройство (РУ) выдает решение о качестве принятого кадра на УУпр. Через taн устройство УУпр прямого канала выдает команды в Нпр и формирователь сигнала обратной связи (ФСОС) передатчика обратного канала (ОКпер). Если ошибка не обнаружена, то формируется сигнал «Подтверждение», который передается по обратному каналу и одновременно выдается команда, по которой информация из Нпр поступает потребителю ПС (А7, А8), (см. на рис. 2.3 передачу блока 1). Для наглядности графики сигналов, относящихся к разным частям системы (относительно ст. А и Б), на рис. 2.3 разнесены. Пройдя по обратному каналу за время tрос сигнал подтверждения распознается дешифратором сигнала обратной связи ДСОС на ст. А (А10...А12). С помощью УУпер через время анализа сигнала обратной связи ta.oc от ИС запрашивается очередной кадр – и цикл передачи повторяется (информация в Нпер и Нпр в этом случае автоматически стирается при поступлении новых информационных кадров (А13...А14)). Если же ошибка в ПКпр обнаруживается декодером, то формируется сигнал переспроса, передаваемый по обратному каналу, и УУпр ПК выдает команду, запрещающую выдачу информации потребителю ПС из Нпр (эта информация уже не представляет интереса, и она уничтожается в накопителе, т. е. «стирается»). Временная диаграмма процессов (А9...А13) показана на рис. 2.3 при передаче блока 2. Пройдя по обратному каналу за время tрос, сигнал переспроса распознается ДСОС ст. А. С помощью УУпер через tа.ос из накопителя Нпер хранящийся там кадр повторно передается в кодер и далее. Источнику сообщений ИС из УУпер ПКпер поступает сигнал, запрещающий передавать очередной информационный кадр. Следовательно, информация из Нпер будет повторяться до тех пор, пока не придет сигнал подтверждения. Если происходит длительное нарушение связи, в системе начинает циркулировать один и тот же информационный кадр – говорят, что система «зацикливается». С целью предотвращения «зацикливания» обычно ограничивают количество таких повторов. После некоторого числа повторов одного и того же информационного кадра система переводится в режим «авария». Таким образом, источнику сообщений «разрешается» выдавать только по одному информационному кадру с паузой между двумя соседними, равной времени ожидания ответа подтверждения по обратному каналу. С помощью современных вычислительных средств возможно моделирование системы передачи данных с РОС-ОЖ.
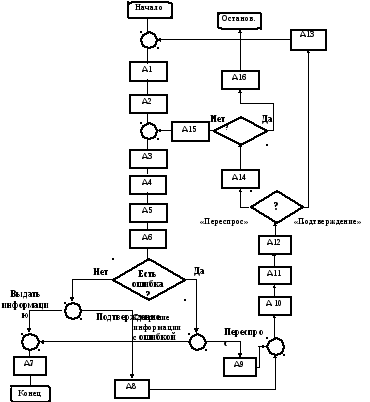
Рисунок 2.2. – Граф-схема алгоритма работы системы ПД с РОС-ОЖ:
А1 – запрос очередного блока от ИС; А2 – запись очередного информационного блока в Нпер; А3 – кодирование; А4 – передача по ПК; А5 – прием из ПК; А6 – декодирование и запись принятого информационного блока в Нпр; А7 – выдача блока из Нпр ПС; А8 – сигнал подтверждения; А9 – формирование сигнала переспроса; А10 – передача по ОК; А11 – прием из ОК; А12 – дешифрирование сигнала ОС; А13 – стирание предыдущего информационного блока в Нпер; А14 – счет числа запросов i-блока; А15 – блокировка ИС и повторение передачи информационного блока из Нпер; А16 –формирование сигнала «Авария»
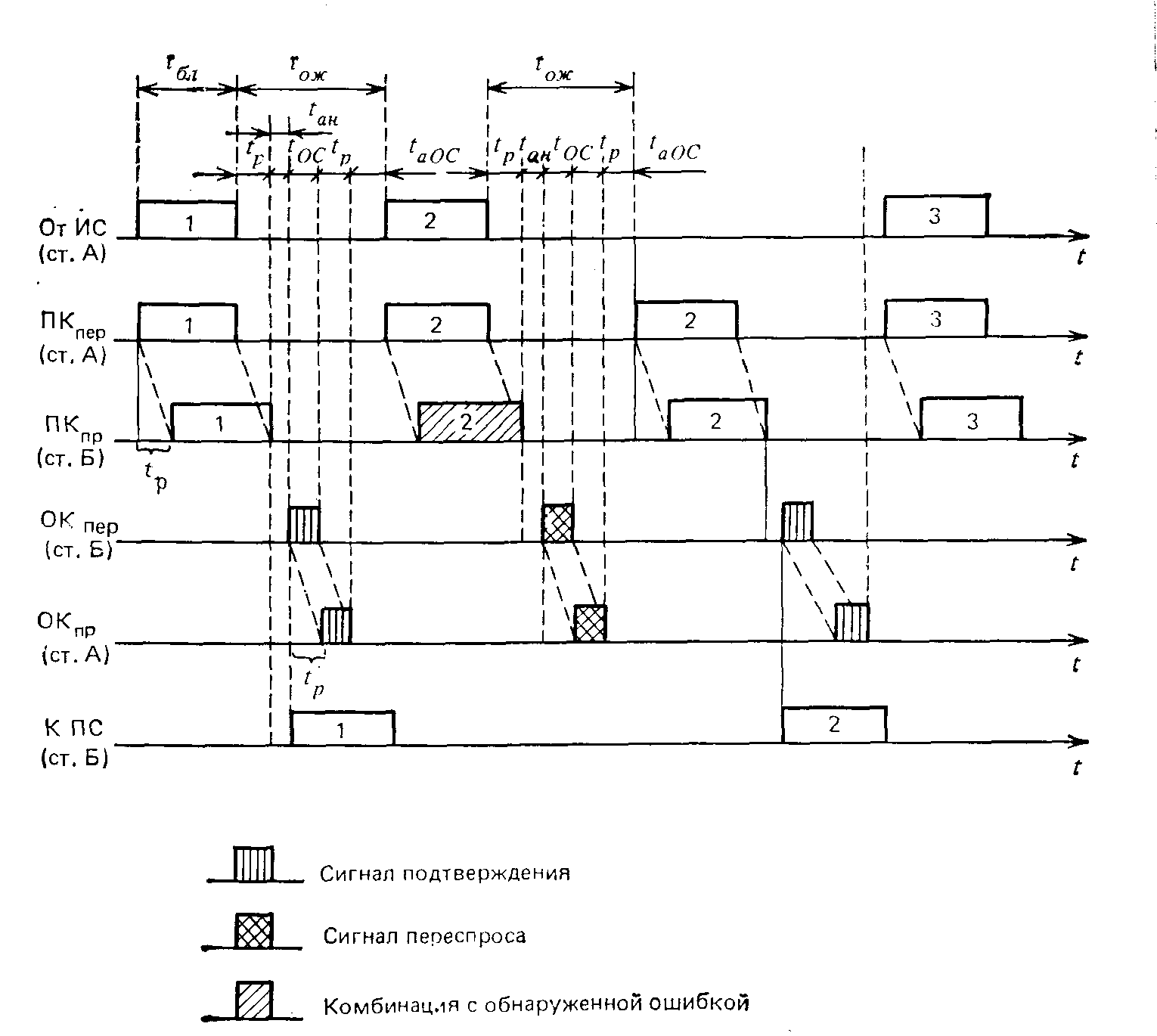
Рисунок 2.3 – Временная диаграмма работы системы с РОС-ОЖ
Минимальное время ожидания tож можно легко определить по рис. 2.3:
tож = tр + tан + tос + tр.ос + tа.ос ,
где toс – длительность сигнала в канале обратной связи.
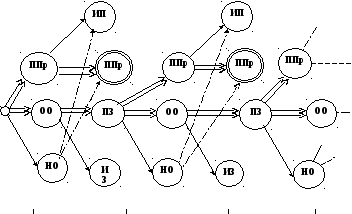
Алгоритм работы системы с РОС-ОЖ весьма наглядно иллюстрируется графом состояний системы на рис. 2.4.
Как видно из рис. 2.4, правильный прием информационного кадра происходит только в следующих случаях (отмечено двойными окружностями и двойными линиями):
правильная (без ошибок) первая передача по прямому каналу и правильный прием сигнала подтверждения;
обнаружение ошибки при первой передаче, правильный прием сигнала запроса, правильная вторая передача и правильный прием второго сигнала
подтверждения;
обнаружение ошибки при первой передаче, правильный прием сигнала запроса, обнаружение ошибки при второй передаче, правильный прием второго сигнала запроса, правильная третья передача и т. п.
 Вставка
Вставка
Р
НП
Выдача ошибки ПИ Выпадение
1-й цикл 2-й цикл 3-й цикл
Рисунок 2.4 – Граф состояний системы с РОС-ОЖ:
НП – начало передачи; ОО – обнаруженная ошибка; НО – необнаруженная ошибка; ППр – правильный прием; ИП – искажение подтверждения; ИЗ – искажение запроса; ПП – правильное подтверждение; ПЗ – правильный запрос
После этого система переходит к передаче следующего информационного кадра. В случае необнаружения ошибки при передаче по прямому каналу и правильном приеме сигнала подтверждения (отмечено штриховой линией) к ИП поступает информация с ошибкой – и система переходит к передаче следующего информационного кадра. Если при необнаруженной ошибке в прямом канале происходит трансформация сигнала подтверждения в сигнал запроса в обратном канале (отмечено штрих-пунктирной линией), то система повторяет передачу той же кодовой комбинации, в результате чего происходит «вставка». Вставка может произойти и в том случае, когда при правильном приеме по прямому каналу в обратном канале сигнал подтверждения трансформируется в сигнал запроса.
Если при передаче по прямому каналу приемник обнаруживает ошибки и в обратном канале сигнал запроса трансформируется в сигнал подтверждения, передатчик выдает новое сообщение, а так как предыдущее сообщение стирается, то происходит «выпадение». Как видно на графе, вставки и выпадения могут происходить не только на первом цикле передачи кодовой комбинации, но и на последующих циклах. Эти два явления, характерные для всех систем с ОС, получили общее название «сдвига». В литературе данные искажения иногда называют зеркальными ошибками.
На рис. 2.5 показана временная диаграмма работы системы с РОС-ОЖ с изменением сигнала в канале ОС. При ошибке в сигнале подтверждения (см. передачу информационного кадра 3) происходит вставка, при ошибке в сигнале переспроса (см. передачу информационного кадра 4) образуется выпадение.

Рисунок 2.5 – Появление ошибок «сдвига» в системе ПД с РОС-ОЖ
Для борьбы со сдвигами применяют различные способы. Наряду с общими методами повышения помехоустойчивости обратного канала наиболее радикальным оказался метод циклической нумерации передаваемых кадров. Используют две разновидности таких методов. При первом методе передаваемые кадры циклически нумеруются. Номер размещается в начале каждого кадра или непосредственно за синхропоследовательностью, служащей для групповой синхронизации, и сохраняется за кадром до тех пор, пока он не будет правильно принят, то есть при повторных передачах кадра его номер сохраняется. Например, при передаче кадров 1, 2, 3, 4 и длине цикла нумерации, равной 3, в случае однократной передачи первого кадра, трехкратной – второго и двукратной – третьего последовательности номеров в канале имеют следующий вид:
а1, а2, а2, а2, а3, а2, а1, ...,
где а1, а2, а3, – циклические номера информационных кадров.
При втором методе все кадры, которые передаются один раз, имеют один и тот же номер (например, а0) и только при повторениях производится циклическая нумерация, соответствующая числу повторений. Например, при трех циклических номерах, однократной передаче первого кадра, двух повторениях второго, пяти – третьего и одном повторении четвертого кадра последовательность циклических номеров в канале имеет следующий вид:
а0, а0, а1, а2, а0, а1, а2, а3, а1, а2, а0, а1, ...
При обоих методах циклической нумерации приемник системы контролирует номера принятых кадров. В тех случаях, когда номер принятого кадра предшествует ожидаемому, принятая информация стирается, а в канал ОС передается сигнал подтверждения. Рассмотренная ситуация возникает при трансформации сигнала подтверждения на предшествующий кадр в сигнал запроса, что в отсутствие циклической нумерации привело бы к вставке кадра. Если номер принятого кадра соответствует номеру следующего после ожидаемого, что соответствует трансформации сигнала «переспрос» в сигнал «подтверждение», то приемник системы вырабатывает специальный сигнал о выпадении кадра. По этому сигналу передача может быть прекращена, зафиксирован факт наличия выпадения или произведен повторный запрос на повторение кадра.
Следовательно, процесс передачи кадра может быть закончен в течение одного цикла выдачей получателю сообщений правильного или содержащего ошибку кадра, а может продолжаться некоторое число циклов. Таким образом, работа системы с ОС и повторением передачи кадров представляют собой случайный процесс, удобным средством исследования которого является использование вероятностных графов. Подобно широко используемым в теории электрических цепей сигнальным графам, вероятностные графы состоят из некоторого числа узлов и соединяющих их направленных ветвей. Каждый из узлов вероятностного графа соответствует одному из характерных временных моментов состояния системы в процессе ее функционирования. Каждая из направленных ветвей отображает переход системы из одного состояния в другое.
Если
из одного состояния системы в другое
возможны переходы за время t1
с вероятностью
p1,
за время t2
– с
вероятностью р2
и за время tv
– с вероятностью
рv,,
то
соответствующему ребру графа соотносят
переходную функцию
![]() .
.
Для
анализа системы ПД удобно предположить,
что величины ti
кратны некоторой величине t,
т. е. ti
= ait,
где аi
–
целые числа. При этом в качестве единицы
масштаба времени примем t
– время передачи одной комбинации
помехоустойчивого кода (п,
k).
Обозначив zt
= x,
можно переходы описывать переходной
функцией
![]() .
.
Эффективность системы ПД оценивается вероятностью выдачи ПС кадров с ошибками, временем задержки сообщений и скоростью их передачи. Рассмотрим сначала случай передачи сообщения, состоящего из Sкадров с помехоустойчивым кодом (п,k),при отсутствии ошибок в канале ОС.
Соответствующий вероятностный граф, содержащий S + 1 состояние системы, представлен на рис. 2.6.
Каждое из S первых состояний системы соответствует передаче i-го кадра. Состояние S + 1 характеризует окончание передачи сообщения, т. е. выдачи в ПС всех S информационных кадров.
После приема сообщения каждого i-го кадра и принятия по нему решения на выдачу его ПС система переходит в состояние i + 1. Если же принимается решение о переспросе, система остается в состоянии i. Обозначим вероятность принятия решения о выдаче информации ПС через рп , а решение о переспросе через рз = 1 – рп.

1 Рп 2 Рп S Рп S + 1
Рисунок 2.6 – Вероятностный граф системы с РОС-ОЖ при идеальном канале ОС
Будем считать, что эти вероятности зависят только от сигналов, соответствующих данному кадру, и не зависят от ранее принятых решений. При этом по графу системы может быть найдена переходная функция вероятностей перехода p(, S) системы из состояния 1 в состояние S + 1 за шагов ( ≥ S)
и переходная функция вероятностей перехода системы из состояния i в состояние i + 1 за шагов
f1(x) = pпx/(1 – p3x).
Среднее число переданных по каналу кадров на один (х = 1) принятый кадр
M1[ ] = f1(1) = 1/(1 – pз) = 1/pп.
Поскольку число кадров, поступающих в ПС, в М[] раз меньше числа передаваемых кадров, то вероятность выдачи ПС информационных кадров с необнаруженной ошибкой будет определяться
Рош.с(п) = Poш(n)M1 [] =Рош(п)/рп,
где рош(п) – вероятность необнаруженной ошибки.
Так как скорость передачи данных, т. е. число кадров, выдаваемых ПС за единицу времени, в системах с ОС меняется в зависимости от состояния дискретного канала, различают текущую Rт и среднюю Rсp скорости. Текущая скорость определяется отношением числа двоичных символов, выданных с выхода системы ПС за время t, ко времени t. Средняя скорость есть величина, к которой стремится текущая скорость при достаточно больших t. В соответствии с этим определением и временной диаграммой на рис. 2.3,
![]() ,
,
где 0 – длительность единичного элемента; Nпр – число кадров, выданных ПС за время t; Nпер – число кадров, переданных по каналу за время t.
С учетом того, что Nпр/ Nпер = 1/М [] = рп,
Rт = kрп/(n + ),
где = tож/0. Время tож = 2tр + tо.с + tа.к + tа.с, где tp – время распространения сигнала по каналу; to.c – длительность сигнала обратной связи; ta.к, ta.c – время анализа комбинации и сигнала обратной связи. Следовательно, система с РОС-ОЖ достаточно эффективна при n , т. е. при работе со сравнительно длинными информационными блоками и небольшим временем задержки в каналах небольшой протяженности.
Время передачи сообщения длиной S информационных кадров и время задержки сообщения в системе являются случайными величинами и могут быть охарактеризованы вероятностью задержки сообщения в системе на время, большее некоторой величины – р(t ). Величину целесообразно выбрать исходя из времени, необходимого для однократной передачи всего сообщения, которое, как следует из рис. 2.6, составляет
t1 = Sn0 + (S – 1) 0 + tр + tа.к.
Так как при передаче сообщения возникает необходимость в повторных передачах некоторых кадров, время передачи всего сообщения увеличивается, что может быть учтено введением коэффициента числа повторений χ:
![]() ,
,
где χ = 0, 1, 2, ...
Величину tχ. целесообразно принять в качестве . Вероятность приема всего сообщения после передачи по каналу комбинаций равна вероятности р(, S) перехода системы из состояния 1 в состояние S + 1 за шагов. Поэтому вероятность задержки сообщения из S блоков в системе на время, большее = tχ,
![]() .
.
Вероятность р(, S) равна соответствующим коэффициентам разложения переходной функции fs(x) в степенной ряд:
![]() .
.
Поэтому
![]() .
.
С
учетом S +
χ =
получим
![]() при
≥ S. Искомая
вероятность задержки сообщения в системе
составляет
при
≥ S. Искомая
вероятность задержки сообщения в системе
составляет
![]() .
.
Рассмотрим теперь более общий случай, когда обратный канал неидеален, т.е. в нем имеются ошибки. Введем следующие обозначения: рп.п – вероятность получения сигнала подтверждения при передаче сигнала подтверждения; рз.п = 1 – рп.п – вероятность получения сигнала запроса при передаче сигнала подтверждения; рз.з – вероятность получения сигнала запроса при передаче сигнала запроса; рп.з = 1 – рз.з – вероятность получения сигнала подтверждения при передаче сигнала запроса.
Вероятностный граф, соответствующий передаче сообщения из S кадров, представлен на рис. 2.7. На нем показаны следующие состояния системы: 1 – начало передачи первого кадра сообщения; 1 – принятие преемником системы решения о выдаче первого кадра ПС и передача по каналу ОС сигнала подтверждения; 1 – принятие приемником системы решения о переспросе первого кадра и передача по каналу ОС сигнала запроса; 2 – прием сигнала подтверждения по первому кадру и передача второго кадра или прием сигнала запроса по первому кадру и повторная передача первого кадра; 2', 2", 3 определяются аналогично; S + 1 – прием сигнала подтверждения по S-му кадру, т. е. конец передачи сообщения.
ЗЗ ЗЗ ЗЗ
 pз
1ПЗ
pз
2
ПЗ pз
S
ПЗ
pз
1ПЗ
pз
2
ПЗ pз
S
ПЗ
1 2 S
1 pп ПП 2 pп ПП 3 pп ПП S+1
ЗПЗП ЗП
Рисунок 2.7 – Вероятностный граф системы с РОС-ОЖ
при канале ОС с ошибками
Переходная функция перехода системы из состояния 1 в состояние S+1 за шагов ( ≥ S) имеет следующий вид:
![]() ,
,
где переходам системы из состояния i в состояние i и i приписана переменная х, а переходам из состояний i или i в состояния i или i + l – переменная у.
Введя обозначения z = xy; р = рзрз.з + рп рз.п, Q = 1 – р = рп рп.п + рз рп.з,
получим
![]() .
.
Следовательно, переходная функция для системы с РОС-ОЖ с неидеальным обратным каналом имеет тот же вид, что и для системы с идеальным обратным каналом. Поэтому полученные выше формулы справедливы и для системы с неидеальным обратным каналом при замене в них рз на р и рп на Q:
![]()
![]()
![]() .
.
Эти выражения показывают, что при незначительных вероятностях ошибок рп.з и рз.п → 0 и соответственно рп.п и рз.з → l параметры обратного канала практически не сказываются на значениях верности, скорости передачи и временных характеристиках системы.
Эффективность использования пропускной способности канала связи в системах с РОС-ОЖ сравнительно невелика, так как прямой канал простаивает в промежутки времени между передачами отдельных кадров в ожидании получения сигналов решения. Поэтому такие системы используют главным образом в тех случаях, когда определяющим является требование простоты (экономичности) аппаратуры. Стремление к более полному использованию каналов привело к разработке систем, в которых отсутствуют промежутки между передачей отдельных информационных кадров.