

1.9 Способы повышения верности и скорости передачи информации в системах с рос
Ранее
указывалось, что искажения командных
сигналов, особенно при запаздывании,
вызывают значительные искажения
регистрируемых сообщений. В системах
с безадресным повторением характер
проявления помех в обратном канале при
решающей и информационной обратной
связи примерно одинаков: образование
сигнала
![]() и подавление сигнала
и подавление сигнала![]() приводят к необнаруживаемым ошибкам и
неправильной регистрации соответственно
приводят к необнаруживаемым ошибкам и
неправильной регистрации соответственно![]() и
и![]() кодограмм; подавление сигнала
кодограмм; подавление сигнала![]() и появление сигнала
и появление сигнала![]() вызывают пропуск
вызывают пропуск![]() и
и![]() кодограмм. В системах с адресным
повторением трансформация адреса
приводит к ошибке, эквивалентной
подавлению кодограммы в прямом канале.
Поэтому цена искажений командных
сигналов в обратном канале больше, чем
цена искажений рабочих кодограмм в
прямом канале.
кодограмм. В системах с адресным
повторением трансформация адреса
приводит к ошибке, эквивалентной
подавлению кодограммы в прямом канале.
Поэтому цена искажений командных
сигналов в обратном канале больше, чем
цена искажений рабочих кодограмм в
прямом канале.
Рассмотрим
некоторые особенности искажений сигналов
![]() в системах с РОС с позначной проверкой.
В таких системах целесообразно
обеспечивать асимметрию алгоритма
работы приемного устройства, добиваясь
чтобы при
в системах с РОС с позначной проверкой.
В таких системах целесообразно
обеспечивать асимметрию алгоритма
работы приемного устройства, добиваясь
чтобы при![]() выполнялось неравенство
выполнялось неравенство![]() .
Действительно, если в качестве сигнала
.
Действительно, если в качестве сигнала![]() используется одна из комбинаций
используется одна из комбинаций![]() -кода,
то вероятности
-кода,
то вероятности
![]() ;
;
![]() ,
,
где вероятность трансформации кодограммы в обратном канале выражена
 ,
(1.53)
,
(1.53)
![]() –число
кодограмм с весом
–число
кодограмм с весом
![]() .
Образование сигнала
.
Образование сигнала![]() и трансформация сигнала
и трансформация сигнала![]() в разрешенную кодограмму вызовут ошибки
при регистрации сообщений с вероятностями
в разрешенную кодограмму вызовут ошибки
при регистрации сообщений с вероятностями
![]() ;
;
![]() .
.
Коэффициент
![]() (1.54)
(1.54)
зависит
от исправляющей способности кода и
уровня шумов в канале
![]() ,
причем с увеличением
,
причем с увеличением![]() коэффициент
коэффициент![]() возрастает. Для каналов высокого качества
со средней вероятностью искажения
символа
возрастает. Для каналов высокого качества
со средней вероятностью искажения
символа![]() и кодов с
и кодов с![]() и
и![]() значение
значение![]() .
Например, при ошибке в ДК
.
Например, при ошибке в ДК![]() и помехоустойчивом (10,5)-коде вероятность
и помехоустойчивом (10,5)-коде вероятность![]() и
и![]() .
Случаи, когда
.
Случаи, когда![]() ,
встречаются на практике очень редко.
,
встречаются на практике очень редко.
Следовательно,
ошибки, обусловленные образованием
сигналов
![]() ,
преобладают над ошибками из-за
подавления сигнала
,
преобладают над ошибками из-за
подавления сигнала![]() .
Поэтому путем рационального кодирования
должна быть обеспечена защита от
образования ложных сигналов запроса.
.
Поэтому путем рационального кодирования
должна быть обеспечена защита от
образования ложных сигналов запроса.
Подавление
сигнала
![]() вызывает на приемной станции стирание
вызывает на приемной станции стирание![]() кодограмм и, так как в накопителе
передающей станции эти кодограммы также
стираются, исправить ошибку становится
невозможным. В то же время при образовании
сигнала
кодограмм и, так как в накопителе
передающей станции эти кодограммы также
стираются, исправить ошибку становится
невозможным. В то же время при образовании
сигнала![]() серия из
серия из![]() ошибочно повторенных кодограмм
фиксируется, и если эта серия обладает
каким-то отличительным признаком, то
она может быть исключена при регистрации.
В результате лишь снижается средняя
скорость передачи информации.
ошибочно повторенных кодограмм
фиксируется, и если эта серия обладает
каким-то отличительным признаком, то
она может быть исключена при регистрации.
В результате лишь снижается средняя
скорость передачи информации.
Адаптивные
системы ПД с ОС с помехоустойчивыми
сигналами
![]() и
и![]() ,
обладающие асимметричным алгоритмом
обработки, будем называть системами
с надежным командным сигналом (РОС-НКС,
ИОС-НКС).
,
обладающие асимметричным алгоритмом
обработки, будем называть системами
с надежным командным сигналом (РОС-НКС,
ИОС-НКС).
Увеличения помехоустойчивости командных сигналов можно достигнуть тремя методами: повышением их энергии, применением групповой проверки и использованием обратной связи с сигналами подтверждения.
Первый метод сопряжен с увеличением мощности передатчика или длительности посылок; он ухудшает энергетическую скрытность связи, повышает уровень станционных помех и оказывается эффективным только в каналах с низким уровнем шумов.
При
втором методе передается и проверяется
![]() раз группа кодограмм, одна из которых
используется в качестве командной. В
результате мажоритарной обработки
вероятность ошибочного декодирования
уменьшается. Недостаток метода заключается
в том, что среднее число повторений
раз группа кодограмм, одна из которых
используется в качестве командной. В
результате мажоритарной обработки
вероятность ошибочного декодирования
уменьшается. Недостаток метода заключается
в том, что среднее число повторений
![]() ,
,
где
![]() – среднее число повторений в режиме
позначной передачи, быстро
– среднее число повторений в режиме
позначной передачи, быстро
увеличивается
с ростом
![]() ,
,![]() и
и![]() .
.
Наиболее
эффективен метод с использованием
обратной связи с сигналами подтверждения
(РОС-ПС), предложенный Р. И. Зверевым и
представляющий собой развитие метода
С. Чанга. Пусть алгоритм работы системы
РОС-ПС таков, что принятый в обратном
канале сигнал запроса
![]() всякий раз ретранслируется по прямому
каналу в виде сигнала
всякий раз ретранслируется по прямому
каналу в виде сигнала![]() ,
после чего кодограмма повторяется.
Такой алгоритм позволяет обнаруживать
ошибочно повторенные кодограммы, а при
запаздывании – все
,
после чего кодограмма повторяется.
Такой алгоритм позволяет обнаруживать
ошибочно повторенные кодограммы, а при
запаздывании – все![]() последующих кодограмм сравнением
последней рабочей кодограммы с
предыдущей.
последующих кодограмм сравнением
последней рабочей кодограммы с
предыдущей.
Предположим, что приняты без обнаруженных ошибок две последовательности кодограмм:
![]() ;
(1.55)
;
(1.55)
![]() ;
(1.56)
;
(1.56)
причем
в последовательности (1.55) образовался
ложный сигнал запроса
![]() ,
а в последовательности (1.56) – ложный
сигнал запроса
,
а в последовательности (1.56) – ложный
сигнал запроса![]() в результате трансформации кодограммы
в результате трансформации кодограммы![]() .
При этом ошибочно повторенная в
последовательности (1.55) кодограмма
.
При этом ошибочно повторенная в
последовательности (1.55) кодограмма![]() будет исключена в результате сравнения
ее с предыдущей кодограммой, а в
последовательности (1.56) ошибка может
быть только обнаружена. Если, однако,
сигналы в накопителе передающей
станции сохраняются настолько долго,
что искаженную кодограмму можно
запросить повторно, то эта ошибка
исправима. Для этого следует после
приема сигнала
будет исключена в результате сравнения
ее с предыдущей кодограммой, а в
последовательности (1.56) ошибка может
быть только обнаружена. Если, однако,
сигналы в накопителе передающей
станции сохраняются настолько долго,
что искаженную кодограмму можно
запросить повторно, то эта ошибка
исправима. Для этого следует после
приема сигнала![]() не фиксировать кодограмму, а вначале
послать сигнал
не фиксировать кодограмму, а вначале
послать сигнал![]() ,
при этом окажется принятой последовательность
,
при этом окажется принятой последовательность![]() ,
и ошибка будет устранена.
,
и ошибка будет устранена.
Искажения при таком алгоритме декодирования могут возникнуть в двух случаях:
– если
в обратном канале образовался сигнал
![]() ,
а в прямом канале кодограмма
,
а в прямом канале кодограмма![]() трансформировалась в разрешенную
кодограмму
трансформировалась в разрешенную
кодограмму![]() (последовательность
(последовательность![]() );
);
– если
в прямом канале кодограмма
![]() трансформировалась в
трансформировалась в![]() ,
а при повторной передаче
,
а при повторной передаче![]() вновь трансформировалась в
вновь трансформировалась в![]() (последовательность
(последовательность![]() ).
).
Вероятность таких ошибок при декодировании равна:
![]() .
.
Так как
![]() ;
;
![]() ;
;![]() ,
,
где
![]() ,
,![]() – вероятности трансформации кодограмм
в прямом и обратном каналах, то
– вероятности трансформации кодограмм
в прямом и обратном каналах, то
 .
.
Если
![]() ,
то
,
то![]() ;
при
;
при![]() вероятность
вероятность
![]()
и, следовательно, такие ошибки можно не учитывать.
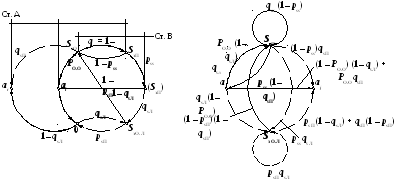
Обобщенный алгоритм работы системы с РОС-ПС. Схема вероятностных переходов системы с РОС-ПС показана на рис. 1.22, где по-прежнему в скобках обозначены принятые, а без скобок – переданные сигналы.
Из рис. 1.22 видно, что возможны два пути развития процесса передачи информации:
– при
передаче кодограммы
![]() ошибка не обнаруживается с вероятностью
ошибка не обнаруживается с вероятностью![]() ,
и сигнал
,
и сигнал![]() не посылается;
не посылается;
– при
передаче кодограммы
![]() ошибка обнаруживается с вероятностью
ошибка обнаруживается с вероятностью![]() ,
и сигнал
,
и сигнал![]() посылается.
посылается.
В
первом случае при отсутствии ложного
запроса ст. А передает очередную
кодограмму
![]() ,
для которой цикл повторяется. Во втором
случае сигнал
,
для которой цикл повторяется. Во втором
случае сигнал![]() посылается всякий раз при обнаружении
ошибки или трансформации кодограммы
посылается всякий раз при обнаружении
ошибки или трансформации кодограммы![]() в сигнал
в сигнал![]() ,
поскольку алгоритм обеспечивает
дуплексную связь с переспросом. Если
сигнал
,
поскольку алгоритм обеспечивает
дуплексную связь с переспросом. Если
сигнал![]() принят
правильно с вероятностью
принят
правильно с вероятностью
![]() ,
то по прямому каналу посылается
сигнал
,
то по прямому каналу посылается
сигнал![]() .
При подавлении сигнала
.
При подавлении сигнала![]() с
с
вероятностью
![]() со ст. А передается очередная кодограмма
со ст. А передается очередная кодограмма![]() .
Переход из узлов графа (
.
Переход из узлов графа (![]() )
и (
)
и (![]() )
к передаче ложного запроса возможен с
вероятностью
)
к передаче ложного запроса возможен с
вероятностью![]() .
.
При
передаче сигнал
![]() может быть принят правильно с вероятностью
может быть принят правильно с вероятностью![]() и, при отсутствии искажений в обратном
канале, кодограмма
и, при отсутствии искажений в обратном
канале, кодограмма![]() будет повторена ст. А. Если же сигнал
будет повторена ст. А. Если же сигнал![]() исказится, то по обратному каналу вновь
будет послан сигнал
исказится, то по обратному каналу вновь
будет послан сигнал![]() и т. д. до тех пор, пока сигнал
и т. д. до тех пор, пока сигнал![]() не будет принят правильно. Факт
безошибочного приема этого сигнала
свидетельствует о нормальных условиях
в обратных каналах, после чего ст. В
начнет регистрировать сообщение.
не будет принят правильно. Факт
безошибочного приема этого сигнала
свидетельствует о нормальных условиях
в обратных каналах, после чего ст. В
начнет регистрировать сообщение.
Таким образом, смысл подтверждающей обратной связи заключается в том, что сигнал запроса используется в качестве зондирующего для определения состояния обоих каналов. Такой режим работы может оказаться эффективным при медленных замираниях, а также при кратковременных перерывах связи.
Рисунок 1.22 – Схема вероятностных переходов системы с РОС-ПС
Ложный
сигнал запроса
![]() обнаруживается с вероятностью
обнаруживается с вероятностью![]() ,
после чего посылается запрос
,
после чего посылается запрос![]() на повторение. Если же сигнал
на повторение. Если же сигнал![]() трансформировался в одну из разрешенных
кодограмм
трансформировался в одну из разрешенных
кодограмм![]() с вероятностью
с вероятностью![]() ,
то возникнет ошибка типа вставки
сигналов.
,
то возникнет ошибка типа вставки
сигналов.
Вероятность
ошибки.
Если уровень помех в обоих каналах мал
и
![]() ,
,![]() ,
,![]() ,
,![]() ,
то нижняя граница вероятности ошибки
в ДК
,
то нижняя граница вероятности ошибки
в ДК
![]() .
.
Для
определения точного значения
![]() составим граф системы (рис. 1.23,
а). Переход от узла графа (
составим граф системы (рис. 1.23,
а). Переход от узла графа (![]() )
к узлу (
)
к узлу (![]() )
через узел (
)
через узел (![]() ),
соответствующий появлению ошибок из-за
образования ложного запроса в обратном
канале, содержит ветви графа с
малыми переходными вероятностями.
),
соответствующий появлению ошибок из-за
образования ложного запроса в обратном
канале, содержит ветви графа с
малыми переходными вероятностями.
Два
других перехода из (![]() )
в (
)
в (![]() ),
соответствующие трансформации рабочей
кодограммы в прямом канале и подавлению
сигнала запроса, имеют только одну ветвь
с малой переходной вероятностью.
),
соответствующие трансформации рабочей
кодограммы в прямом канале и подавлению
сигнала запроса, имеют только одну ветвь
с малой переходной вероятностью.
Рисунок
1.23 – Граф системы POC-ПC
для определения
![]()
Поэтому
в системе ПД с РОС-ПС ошибки, обусловленные
неравенством
![]() ,
значительно меньше, чем в обычной системе
РОС. Дополнительным введением асимметрии
в обратном канале можно обеспечить
,
значительно меньше, чем в обычной системе
РОС. Дополнительным введением асимметрии
в обратном канале можно обеспечить![]() и существенно ослабить влияние помех
на верность связи.
и существенно ослабить влияние помех
на верность связи.
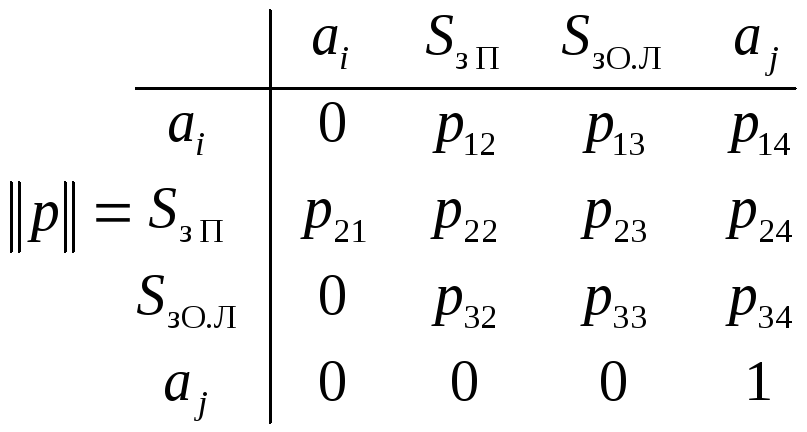
Построим преобразованный граф (рис. 1.23, б), узлы которого отображают работу передатчика ст. А, и с его помощью найдем матрицу переходных вероятностей, которую необходимо записать в виде
 ,
(1.57)
,
(1.57)
где
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() .
.
Матрица
(1.57) разложима, так как узлы
![]() ,
,![]() и
и![]() несущественны, а узлы (
несущественны, а узлы (![]() )
и(
)
и(![]() )
– существенны.
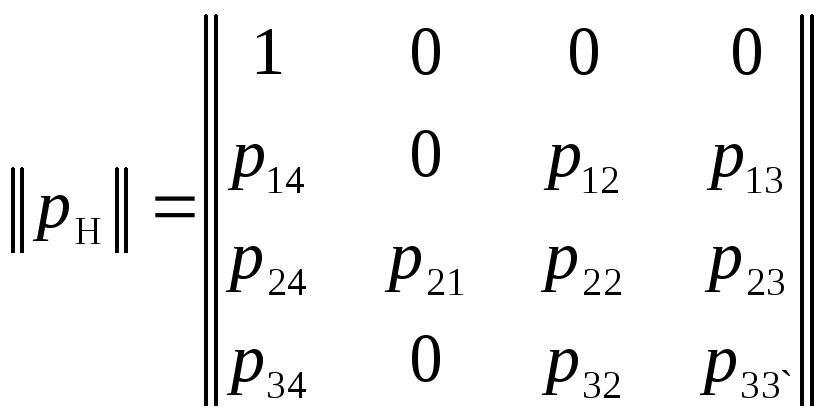
Нормальная формула матрицы имеет вид
)
– существенны.
Нормальная формула матрицы имеет вид
 .
(1.58)
.
(1.58)
Для
определения вероятности
![]() найдем алгебраические дополнения
найдем алгебраические дополнения
 ;
;
и после преобразований получим выражение для вероятности ошибки в ДК
 .
(1.59)
.
(1.59)
Выражение
для вероятности
![]() можно также представить в виде
можно также представить в виде
 .
(1.60)
.
(1.60)
Эта
формула менее компактна, чем (1.59), но она
лучше отображает влияние переходных
вероятностей на верность связи. В каналах
высокого качества вероятности
![]() ,
,![]() ,
,![]() ,
,![]() и
и![]() значительно меньше, чем
значительно меньше, чем![]() ,
,![]() ,
,![]() ,
,![]() и приближенно
и приближенно
![]() .
(1.61)
.
(1.61)
Анализ
формул (1.59) и (1.61) показывает, что ошибки
в системе с РОС-ПС в основном обусловлены
трансформацией рабочих кодограмм в
прямом канале и подавлением сигнала
запроса в обратном канале. При
идеальной обратной связи
![]() ,
,![]() и вероятность ошибки в ДК
и вероятность ошибки в ДК
![]() .
(1.62)
.
(1.62)
Выражение
(1.62), как и следовало ожидать, совпадает
с (1.43), поскольку при отсутствии помех
в обратном канале системы с РОС и с
РОС-ПС эквивалентны. В реальных каналах
![]() и
и![]() ,
при этом вероятность ошибки в системе
ПД с РОС, согласно выражению (1.42),
,
при этом вероятность ошибки в системе
ПД с РОС, согласно выражению (1.42),
![]() .
(1.63)
.
(1.63)
Сравнивая формулы (1.59) и (1.63), видим, что при выполнении условия
![]()
система
с РОС-ПС обеспечивает выигрыш в
помехоустойчивости по сравнению с
системой с РОС. Проанализировать это
неравенство в общем виде затруднительно,
так как переходные вероятности зависят
не только от уровня помех, но и от способа
кодирования. Если, однако,
![]() ,
,![]() ,
,![]() ,
то получим условие
,
то получим условие
![]() .
(1.64)
.
(1.64)
Так
как
![]() ,
,![]() ,
,![]() ,
то система с РОС-ПС всегда дает выигрыш,
причем тем больший, чем больше вероятность
ложных запросов и меньше вероятность
необнаруживаемых ошибок в прямом
канале. Это объясняется тем, что нагрузка
обратного канала в системе с РОС-ПС
несколько уменьшается за счет увеличения
нагрузки в прямом канале.
,
то система с РОС-ПС всегда дает выигрыш,
причем тем больший, чем больше вероятность
ложных запросов и меньше вероятность
необнаруживаемых ошибок в прямом
канале. Это объясняется тем, что нагрузка
обратного канала в системе с РОС-ПС
несколько уменьшается за счет увеличения
нагрузки в прямом канале.
Для
отыскания вероятности ошибки при
ограниченном числе повторений найдем
переходную вероятность в матрице (1.58)
за
![]() циклов:
циклов:
 .
.
Вычисляя в каждом конкретном случае корни характеристического уравнения
![]() ,
,
можно
найти значение
![]() ,
а затем и вероятность
,
а затем и вероятность![]() ,
подобно тому, как делалось в параграфе
1.8:
,
подобно тому, как делалось в параграфе
1.8:
 ,
(1.65)
,
(1.65)
где
корни характеристического уравнения
кратности
![]() будут равны
будут равны
![]() ;
;
![]() ;
;![]() .
.
Среднее
число повторений.
Борьба с помехами в обратном канале
приводит в системе с РОС-ПС к увеличению
среднего числа повторений. Из рис.
1.23, а видно, что наиболее вероятным
переходом от кодограммы
![]() к
к![]() является переход через блуждающую
точку графа 0 с вероятностью
является переход через блуждающую
точку графа 0 с вероятностью![]() .
Возможны такие менее вероятные
варианты переходов:
.
Возможны такие менее вероятные
варианты переходов:
– через
узел
![]() с вероятностью
с вероятностью![]() (обнаружение ошибки и подавлением
сигнала запроса);
(обнаружение ошибки и подавлением
сигнала запроса);
– через
узлы
![]() ,
,![]() и
и![]() с вероятностью
с вероятностью![]() (искажение сигнала
(искажение сигнала![]() в прямом канале);
в прямом канале);
– через
узлы
![]() ,
,![]() ,
(
,
(![]() ),
),![]() ,
,![]() с вероятностью
с вероятностью![]() (обнаружение ошибки в прямом канале,
образование сигнала
(обнаружение ошибки в прямом канале,
образование сигнала![]() в обратном
канале и его подавление при последующем
запросе);
в обратном
канале и его подавление при последующем
запросе);
– через
узлы 0 и
![]() (образование сигнала
(образование сигнала![]() в обратном канале и его
в обратном канале и его
трансформация в разрешенную кодограмму в прямом канале);
– через
узлы 0,
![]() и
и![]() (обнаружение сигнала
(обнаружение сигнала![]() в обратном канале и трансформация
сигнала
в обратном канале и трансформация
сигнала![]() ,
посылаемого после этого по обратному
каналу).
,
посылаемого после этого по обратному
каналу).
Заметим,
что эти варианты возможны при возвращении
системы в узел
![]() через узел (
через узел (![]() ).
При
).
При![]() число таких вариантов неограниченно.
Поэтому целесообразно пользоваться
графом на рис. 1.24, а, соответствующим
схеме вероятностных переходов на рис.
1.22, и преобразованным графом рис.
1.24, б.
число таких вариантов неограниченно.
Поэтому целесообразно пользоваться
графом на рис. 1.24, а, соответствующим
схеме вероятностных переходов на рис.
1.22, и преобразованным графом рис.
1.24, б.
Матрица переходных вероятностей при этом имеет вид
 ,
(1.66)
,
(1.66)
где
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() .
.
Нормальная форма матрицы (1.66) будет определяться записью
 .
(1.67)
.
(1.67)
Для
определения вероятности
![]() перехода от
перехода от![]() к
к![]() за
за![]() циклов составим характеристический
определитель матрицы (1.67):
циклов составим характеристический
определитель матрицы (1.67):

и решим характеристическое уравнение:
![]() .
.
б) а)
Рисунок
1.24 – Граф системы РОС-ПС для определения
![]()
Если
вероятности
![]() ,
,![]() и
и![]() значительно меньше вероятностей
значительно меньше вероятностей![]() ,
,![]() ,
,![]() и
и![]() ,
то получим более простое характеристическое
уравнение
,
то получим более простое характеристическое
уравнение
![]() ,
,
откуда
получаем корни кратности
![]() .
.
Переходная
вероятность матрицы (1.67) за
![]() циклов определяется выражением
циклов определяется выражением
 ,
,
где
алгебраическое дополнение
![]() ,
а
,
а![]() и
и![]() .
Так как финальная вероятность дискретной
цепи Маркова с одним стоком равна
единице, то
.
Так как финальная вероятность дискретной
цепи Маркова с одним стоком равна
единице, то
 .
.
Среднее число повторений сигналов, согласно формуле (1.50),
 .
.
Так как сумма
 ,
,
то окончательно получаем
 .
(1.68)
.
(1.68)
При неограниченном числе передач величина числа повторений сигналов будет определяться выражением
 .
(1.69)
.
(1.69)
Приведенные выражения позволяют определять основные информационные показатели системы ПД с РОС-ПС.