

3.3. Торможение судна
Тормозные характеристики судна, под которыми подразумеваются время и путь торможения в зависимости от начальной скорости, имеют важное значение для обеспечения безопасности мореплавания.
Торможение бывает пассивным и активным.
Пассивное торможение выполняется при остановленном двигателе только за счет сопротивления воды.
Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад.
Реверс главного двигателя не может быть выполнен мгновенно, поэтому активному торможению всегда предшествует участок пассивного.
В общем случае процесс торможения принято делить на три периода.
Первый период—прохождение команды продолжается от момента подачи команды по машинному телеграфу до момента закрытия топлива на ДВС, пара на ТЗА или выключения питания ГЭД. Первый период длится недолго, примерно 5 с.
Второй период— пассивное торможение длится с момента прекращения подачи топлива (пара) на двигатель до момента реверса.
Третий период— активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до какого-то заданного значения.
Полное время Ти полный тормозной путь 5 определяются как суммы соответствующих элементов по трем периодам:
![]()
(3.16)
где римскими цифрами в индексах указаны периоды торможения.
На судах с ВРШ началом третьего периода можно считать момент прохождения лопастями нулевого положения.
Процесс торможения судна на основании (3.1)с учетом(3.8) описывается дифференциальным уравнением вида
(3.17)
Решения записанного в общем виде уравнения (3.17)относительно времени и пути торможения зависят от конкретного вида зависимости для силы упора винтаРСукоторое должно быть подставлено в это уравнение.
Начало исследованиям торможения судна в нашей стране было положено в 50-егоды В. Г. Бакаевым л В. М. Лаврентьевым, предло
жившими для определения текущих значений Реиспользовать диаграммы винтовых характеристик, полученных по результатам модельных испытаний гребных винтов в опытных бассейнах. Расчетная схема, основанная на данном предложении, предусматривала пошаговое численное интегрирование уравнения(3.17),т.е.требовала громоздких вычислений.
Проанализировав результаты, даваемые дайной расчетной схемой, М. А. Гречин (ЦНИИМФ)предложил считать полезную силу упора в процессе торможения постоянной величиной, численно равной значению силы упора в режиме на швартовах, т. е.
(3.18)
Коэффициент kс учетом квадратичной зависимости силы сопротивления от скорости определяется выражением:
![]()
(3.19)
где V'o — исходное значение скорости, м/с;
R0 — полная сила сопротивления воды при скорости Vo, Н.
Подстановка (3.18) и (3.19)в дифференциальное уравнение
(3.17)дает
![]()
(3.20)
v
![]()
(3.21)
dVх,dV
а после подстановки = V—^ соответствующее выражение
![]() для
тормозного пути
для
тормозного пути
(3.22)
В результате интегрирования выражений (3.21) и (3.22)получены рабочие формулы для расчета времени и пути торможения (время, с; путь, м):
для пассивного торможения (Ршв=0):
для активного торможения (РШв>0) : m* V,
/ =
(\ь-
ршв
jn*Vi_(3.26)
Ыг)'+^
![]()
Следует отметить, что сложный характер переходных гидродинамических процессов при реверсировании гребного винта, не имеющих пока строгих теоретических решений, делает необходимыми экспериментальные исследования, результаты которых позволяют оценивать адекватность математических моделей.
Пример такой оценки иллюстрирует рис. 3.2,на котором приведены результаты натурных измерений скорости с интервалом 0,5 уз на двухвинтовом дизель-электроходе «Черное море» при выполнении следующих маневров торможения: ПХП—ПХЗ; МХП—ПХЗ, СМХП— ПХЗ, ПХП—Стоп. На этом же рисунке показаны графикиV(t)для соответствующих маневров, построенные по формулам(3.23)— маневр ПХП—Стоп и(3.25)—^остальные маневры. Необходимые для
расчетов значения коэффициента сопротивления k )и с#лы
упора винта Ршв были предварительно найдены по этим жеформулам из условия равенства значений расчетного и экспериментального времени торможения, чем обеспечивается возможность оценкиматематической модели путем сравнения с данными эксперимента.
Сравнение показывает, что (см. рис. 3.2)рассчитанный графикV(t)для маневра ПХП—Стоп (пассивное торможение) вполне удовлетворительно соответствует экспериментально измереннымскоростям. Что же касается маневров торможенияс реверсированиемдвигателей, то на участках графиков активного торможения наблюдается существенное расхождение между расчетной и экспериментальной скоростью. Расчетные графикиV(t)располагаются ниже фактических значений скорости.
Рис.
3.2.
Графики
торможений
дизель-электрохода «Черное море»:
...
нз натурных измерений
по
формуле математической
ЦНИИМФ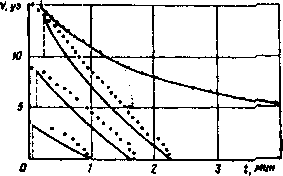
Обработка результатов натурных испытаний, выполненных на различных судах, позволила получить следующие выводы.
Характер снижения скорости при пассивном торможении, выражаемый экспериментальными графиками V(0, вполне удовлетворительно согласуется с квадратичной зависимостью силы сопротивления от скорости(3.3).
Оценка графиков У(/) для ак
тивного торможения показывает, что эффективная сила упора винта после реверсирования от начального значения, близкого нулю, возрастает постепенно и достигает некоторого максимального значения к моменту остановки судна относительно воды.
Регрессионный анализ результатов экспериментов позволил получить эмпирическое выражение, удовлетворительно аппроксимирующее значение полезной силы упора винта Репри торможении в виде:
^шах ^ 1 уЪ (3.27)
где V — текущее значение скорости при активном торможении, м/с;
VH — скорость в момент реверсирования винта (начальная скорость активного торможения), м/с;
Ртах — максимальная сила упора винта, которая достигается к моменту остановки судна относительно воды, Н.
Подстановкой (3.27) в (3.17)после простых преобразований и использования обозначения
кУГ
выражающего отношение максимальной силы упора винта к максимальной силе сопротивления воды, получим дифференциальное уравнение движения судна при торможении в окончательном, удобном для интегрирования виде
(з!9>
Назовем константу а коэффициентом активности торможения.
После разделения переменных получим выражение для времени торможения
mx/k Г dV
~vj~ • (3 M)
а
V*
dV w dV
а после подстановки —^— = V■ в соответствующее выражение для тормозного пути
mxfk ? VdV /oolv
J— • (З-ЗО
V*
Коэффициент активности торможения для разных конкретных условий может быть меньше единицы, больше единицы, равен единице или равен нулю. В каждом из перечисленных случаев меняется вид исходного уравнения (3.29),следовательно, меняется и вид его решений.
Приведем решения уравнения (3.29)относительно времени и пути торможения в зависимости от значений константы а.
а < 1
(1+1/ГГТ)(,. у ,/7П)
l„iУv-
У • ;(3.33)
Путь торможения при:
О < а1
InЦ- ; (3.36)
2(1—в) „ V*
(1 —а) уг -f- а
(■-*>
а
—
1 mxfk
(3.37)
2
а
— О
s=T£',,1_v!"- (3-38)
Дифференциальное уравнение (3.29)и его решение(3.32—3.38) представляют собой математическую модель торможения, разработанную в ОВИМУ на основе анализа результатов натурных испытаний судов.
Данная модель способна воспроизводить любое практически встречающееся изменение скорости при активном торможении. Это обеспечивается тем, что изменяющаяся по закону (3.27)сила упора винта в сумме с силой сопротивления(3.3)может давать суммарную тормозящую силу как возрастающую(а>1),так и снижающуюся (а< 1) в процессе торможения, т. е. описывать как выпуклые, гак и вогнутые графикиV(t)разной степени кривизны вплоть до предельного случая, каковым является пассивное торможение(а=0).
Для наглядной оценки адекватности рассматриваемой математической модели ниже использованы результаты натурных испытаний торможения теплохода «Большевик М. Томас» водоизмещением 22 850 т.
На рис. 3.3 показано пассивное торможение судна ПХПм—Стоп, а на рис. 3.4 — торможение с реверсированием двигателя СХП—ПХЗ. Экспериментальные измерения пути и скорости показаны на обоих
Рис.
3.4.
Графики торможения теплохода
«Большевик М. Томас» с реверсированием
двигателя
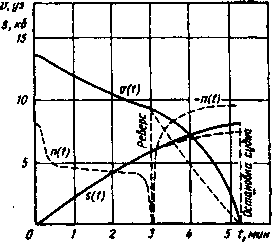
Рис.
3.3.
Графики пассивного торможения
теплохода «Большевик М. Томас»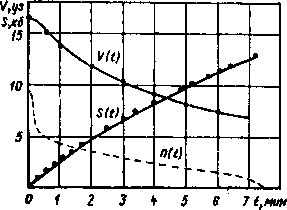
На участке активного торможения от момента реверсирования до остановки судна (см рис. 3.4)для сравнения показаны штриховыми линиями также графики пути и скорости, построенные по формулам
и (3.26).
Помимо описанных, существует еще ряд моделей, из которых можно отметить линейную математическую модель, в которой текущее значение силы сопротивления воды принято пропорциональным скорости судна в первой степени, т. е. R=KV (К— коэффициент сопротивления при линейной зависимости, кг/с), а сила упора — постоянной (Р,.=Р=const).
Имеющиеся результаты натурных экспериментов в виде элементов пассивного и активного торможения по каждому испытанному судну позволяют получить статистические данные точности расчетных значений путей пассивного и активного торможения для каждой математической модели.
Как известно, в общем случае торможения полный тормозной путь содержит участки пассивного и активного торможения (второй и третий периоды). Точность полного тормозного пути в соответствии с теорией ошибок можно оценивать по формуле
(3.39)
т11
«ш
отн
*
отн— относительные СКО соответственно пассивного и активного тормозных путей, %;
sN
отношение пассивного участка к полному тормозному пути;
m
“Тг —отношение активного участка к полному тормозному пути\
Таблица
3.1.
Оценка точности математической модели
торможения судба
Условное
название математической модели
Относительное
СКО, %
тотн
И
о
тн
"отн
Линейная
16,5
16,0
13,04-13,8
ЦНИИМФ
8.4
21,7
8.3-М
8,3
ОВИМУ
8,4
5.4
4,8-т-6,4
Путь первого периода s1(прохождение команды) из-за его малости на оценку точности практически не влияет.
Отношение i—. зависит от типа двигателя и его реверсивного
устройства, а также от начальной скорости судна. В реальных условиях это отношение находится в большинстве случаев в пределах 0,15-7-0,75.Для данных значений в табл. 3.1 приведены результаты оценки точности рассмотренных математических моделей для пассивных, активных и полных тормозных путей, выполненные на базе натурных испытаний торможения с полного и полного маневренного хода на 16 различных судах с проведением надежных траекторных измерений.
Напомним, что при оценке точности расчетные тормозные пути определялись с использованием значений коэффициента сопротивления и силы упора винта, найденных из условия равенства между расчетным к экспериментальным временем торможения. Поэтому приведенные в табл. 3.1 оценки характеризуют потенциальную точность, с которой каждая модель способна описывать процесс торможения судна при условии использования оптимальных значений коэффициента сопротивления и силы упора винта.
Любая из рассмотренных математических моделей может быть использована для расчета ИТХ, если известны значения коэффициента сопротивления и силы упора винта для каждого конкретного судна при заданных условиях торможения. Эти необходимые значения могут быть найдены какими-то расчетными или экспериментально-расчетными способами. Поскольку получаемые таким путем значения коэффициента сопротивления и силы упора винта будут содержать неизбежные погрешности, т. е. не будут оптимальными, то ИТХ, полученные с их использованием, будут характеризоваться (статистически) большими погрешностями, чем те, которые указаны в табл. 3.1.
Контрольные вопросы. 1. Каковы особенности реверсирования главного двигателя на теплоходах с гребным винтом фиксированного шага? 2. Из каких периодов в общем случае состоит процесс торможения судна? 3. Чем отличаются друг от друга основные математические модели торможения судна? 4. Как изменяется полезная сила упора винта в процессе активного торможения? 5. Как влияет загрузка судна на время и путь его торможения? в. Чем объясняется зависимость максимальной силы упора винта при активном торможении от осадки судна?