

Глава 6. Средства и способы улучшения маневренных характеристик судна
Средства активного управлении (САУ)
САУ создаются, как правило, на основе использования: крыльча- i ых движителей (КД), поворотных винтовых колонок (ПВК) и раздельных поворотных насадок (РПН).
Рассмотрим кратко принцип действия перечисленных устройств.
Крыльчатый движитель представляет несколько (4—8) одинаковых поворотных вертикальных лопастей, расположенных на равных расстояниях по окружности вращающегося диска, установленного заподлицо
наружной обшивкой днищевой части судна. При вращении лопастей имеете с диском каждая лопасть посредством специального привода и !яг совершает еще и колебательные движения вокруг собственной оси,
в)
ДП
д)
дп
S)
дп
г)
дп
д)
ап
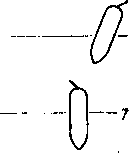
Рис.
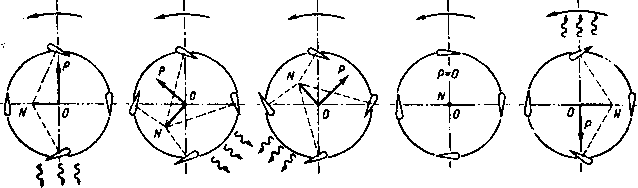
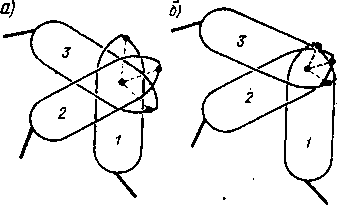
6.1. Направление силы упора крыльчатого
движителя Р
в зависимости от положения центра
управления N
относительно центра диска О: а
— вперед; 6
— вперед и влево; в — вперед и вправо;
г
— нулевой^ упор; д
— назад
благодаря чему углы атаки изменяются в зависимости от угла поворота диска.
Принцип действия КД поясняется на рис. 6.1. В процессе вращения диска каждая лопасть разворачивается перпендикулярно к линии, соединяющей середину хорды лопасти с точкой N. Эта точка называет- ся центром управления. Угол атаки каждой лопасти за время оборота диска непрерывно меняется, достигая максимального значения, когда лопасть находится на радиусе, перпендикулярном ON. Поэтому суммарная сила упора лопастей Р направлена по этому радиусу.
Абсолютное значение углов атаки, а значит и сила упора увеличиваются с увеличением расстояния центра управления от центра диска О, т. е. с увеличением эксцентриситета.
Система управления лопастями КД позволяет устанавливать центр управления N в любое фиксированное относительно судовых осей положение, т. е. без реверсирования создавать упор в любом направлении и изменять его величину.
КД применяется как в качестве ГДРУ (буксиры, паромы, плавкраны и т. п.), так и в качестве вспомогательного средства управления — ПУ на морских судах. В последнем случае КД располагается обычно в поперечном канале, расположенном ниже ватерлинии, в корпусе судна.
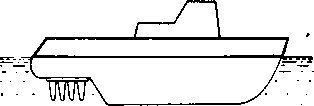
На рис. 6.2 показан пример использования КД в качестве ГДРУ на портовом буксире.
Поворотные винтовые колонки представляют собой гребной винт (иногда в комплексе с насадкой), направление тяги которого может изменяться на 360° за счет поворота относительно вертикальной оси.
ПВК могут быть главными движителями или вспомогательными. В первом случае они относятся к ГДРУ, во втором — к ВДРУ.
 Как
ГДРУ, поворотные винтовые колонки
применяются на судах, к управляемости
которых предъявляются особенно высокие
требования, но скорость которых невелика
(плавкраны, портовые буксиры, пожарные
суда и т. д.).
Как
ГДРУ, поворотные винтовые колонки
применяются на судах, к управляемости
которых предъявляются особенно высокие
требования, но скорость которых невелика
(плавкраны, портовые буксиры, пожарные
суда и т. д.).
Рис. 6.2. Пример использования КД в качестве ГДРУ на портовом буксире
\
■
i
V
ш
i'
Рис.
6.3. Схема действия раздельных поворотных
насадок (РПН):
а
— перекладка РПН внутрь; б
— перекладка РПН наружу
В
качестве ВДРУ ПВК чаще
всего применяются
на судах, на ко-
торых по условиям
эксплуатации
необходимо длительное
время удер-
живаться на постоянном
курсе и
(или) в заданной точке
(например,
научно-исследовательские
судна,
кабелеукладчики, плавучие
буровые
установки и т. п.).
ПВК,
используемые как ВДРУ,
выполняются,
как правило, откид-
ными либо выдвижными,
что позво-
ляет во время перехода
убрать их
внутрь корпуса для уменьшения
со-
противления.
Частным
случаем ПВК являет-
ся активный руль
(АР), представ-
ляющий собой сочетание
обычного
руля с небольшим гребным
винтом,
установленным за задней
кромкой
пера руля. Такой винт обычно
снаб-
жается
направляющей насадкой для повышения
КПД. Винт АР при-
водится во вращение
электродвигателем, вмонтированным в
перо руля
и закрытым грушевидным
обтекателем. Перо руля с установленным
на
нем винтом АР поворачивается
обычной рулевой машиной, но предель-
ные
углы перекладки для повышения
эффективности АР увеличивают-
ся до
70—90°.
АР
позволяет разворачивать судно при
отсутствии хода, а также
осуществлять
маневрирование без работы главного
движителя на стес-
ненной акватории.
При этом скорость судна можно изменять
от нуля
до 3—4 уз при полном сохранении
управляемости.
Раздельные
поворотные насадки
по своей форме не отличаются от
обычных
поворотных винтовых насадок. Они
устанавливаются на двух-
винтовых
судах и имеют конструкцию привода,
позволяющую выпол-
нять раздельную
их перекладку.
РПН
имеют широкое применение на речных
транспортных судах и
судах смешанного
плавания, на буксирах-толкачах, а также
на морских
буксирах-кантовщиках.
РПН
при работе винтов враздрай позволяет
создавать значитель-
ную боковую тягу
при отсутствии хода, что показано на
рис. 6.3.
Если
обе направляющие насадки переложены
внутрь (см. рис.
6.3, а), то равнодействующая
тяг винтов, приложенная за кормой,
соз-
дает большой момент и судно
совершает быстрый разворот на месте.
При
перекладке насадок наружу точка
приложения равнодействую-
щей тяг
смещается вперед от насадок (см. рис.
6.3/б).
В зависимости
от угла поворота насадок
точка приложения может Находиться
позади
или впереди миделя, а в частном
случае—на миделе. В этом послед-
нем
случае создается боковая тяга, и судно
приобретает движение
лагом.
При
работе винтов в одном направлении и
совместной перекладке
насадок в одну
сторону РПН работает как обычное рулевое
уст-
ройство.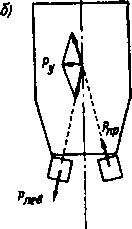
Принципы управления судном с использованием САУ
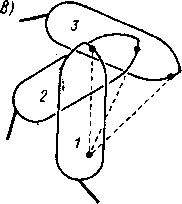
Общим признаком, характеризующим рассмотренные в п. 6.1 САУ, является способность создавать поперечную силу даже при полном отсутствии скорости судна по курсу.
Точка приложения поперечной силы по длине судна зависит от места установки данного САУ. Исключением является РПН, позволяющие в зависимости от угла перекладки насадок приложить поперечную сипу к диаметральной плоскости в любой точке корпуса судна, а также за его пределами.
Если же на судне установлены, например, две поворотные винтовые колонки или два подруливающих устройства —- носовое и кормовое, то совместное использование таких САУ тоже позволяет произвольно выбирать точку приложения поперечной силы, как и при использовании РПН.
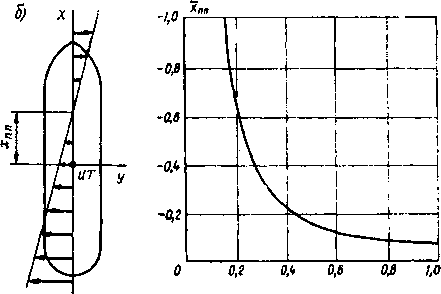
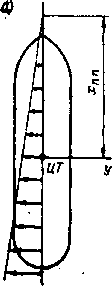
Характер поведения судна под воздействием САУ определяется расстоянием точки приложения поперечной силы Р„ от ЦТ судна, т. е. плечом .v„. Под влиянием момента поперечной силы Мр=Ру судно полу- чает вращательное движение. При этом тангенциальная скорость каж-| дой точки по длине судна определяется расстоянием этой точки от ПП и угловой скоростью судна.
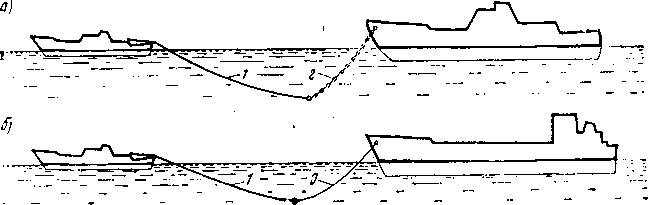
Распределение местных скоростей по длине судна при вращении вокруг ПП, расположенного на некотором расстоянии от ЦТ, показано на рис. 6.4. В одном случае (рис. 6.4,‘а) ПП расположен за корпусом судна на продолжении его ДП, а в другом (рис. 6.4, б) —в пределах корпуса судна.
Напомним, что ПП называется точка на ДГ1, в которой угол дрейфа равен нулю. Когда вращение судна происходит относительно неподвижной точки ПП, лежащего на ДП, уравнения установившегося движения судна (по оси Y и вокруг оси Z) могут быть записаны в виде: !
Ry -Ри ; |
Мщ'иР,Х,~РШ1ЛрЧ (Ь "
где Ry — поперечная гидродинамическая сила на корпусе (равнодействующая сил);
Ру — поперечная сила САУ (или буксира);
Мп — момент поперечной гидродинамической силы относительно ЦТ (оси Z);
хр —- плечо поперечной силы САУ (или буксира) относительно ЦТ;
длина судна;
хР — относительное плечо силы Pw
Если принять для простоты, что корпус судна симметричен относительно миделя (ЦТ), а осадка на всем протяжении корпуса постоянна (судно — на ровном киле), то элементарную гидродинамическую силу dRVt действующую на элемент корпуса по длине dd\\ и ее момент dM можно записать в виде системы:
d v* dx;
dMR- с ~-dv*xdx,
где г — коэффициент сопротивления воды перемещению элемента; v --скорость элемента: d — осадка.
Скорость и любого элемента с элементарной площадью ddx:
(6.3)
| де .г - относительное расстояние элемента от ЦТ;
<»> — угловая скорость судна.
Учитывая, что dx=Ldxt для случая Зспп!>1/2 (ПП вне корпуса):
1/2
R»
=
с -у dL3
0)2
J
—~x)2dx^c
dL3
о>2
(л*п+
j;
—
1
'2![]()
(6.5)
Для
случая Хпп<1/2
(ПП в пределах корпуса судна):
(6.6)
Mp**c£-dL‘
(6.7)
Подставляя значения Rv и MR из выражений (6.4), (6.5), (6.6) и
в уравнение (6.1) и разрешая их относительно хл, получим зависимости, связывающие хр и хпп:
а) для случая хПп>1/2
(6.8)
х*
-I — пп
1 12
(6.9)
б) для
случая Хпп <1/2
По
формулам (6.8)
и (6.9) рассчитан и построен график xi>n
= /(xp),
приведенный на рис. 6.5, с которого можно
снять положение ПП хпп
для нобой точки поперечной силы хр
либо решить обратную задачу. Знак
минус» у хШ|
указывает на то, что точка приложения
поперечной силы п МП всегда расположены
по разные стороны от ЦТ судна.
И,
наконец, следует еще отметить, что
вращение судна вокруг ПП, охраняющего
неподвижное положение относительно
воды, возможно![]()
Рис.
6.4. Распределение местных тангенци-
Рис. 6.5. Положение полюса поворота в
альных скоростей по длине судна при
вра- зависимости от места приложения
попе- щении вокруг полюса поворота речной
силы по длине судна
 лишь
в частном случае, когда этот ПП совпадает
с ЦТ судна (например, при использовании
носового и кормового ПУ одновременно).
Если же ПП отстоит от ЦТ на некотором
расстоянии хПп,
то при вращении возникает центробежная
сила, приложенная к ЦТ, в результате
чего судно постепенно приобретает
также и продольное перемещение. Это
движение при необходимости можно
компенсировать подрабатыванием главного
двигателя в нужном направлении.
лишь
в частном случае, когда этот ПП совпадает
с ЦТ судна (например, при использовании
носового и кормового ПУ одновременно).
Если же ПП отстоит от ЦТ на некотором
расстоянии хПп,
то при вращении возникает центробежная
сила, приложенная к ЦТ, в результате
чего судно постепенно приобретает
также и продольное перемещение. Это
движение при необходимости можно
компенсировать подрабатыванием главного
двигателя в нужном направлении.
Использование якорей при маневрировании
Судовые якоря при надлежащем их использовании позволяют при * маневрировании в стесненных условиях существенно расширить воз- ^ можности судна, особенно, если оно не имеет средств активного управления.
Это достигается благодаря использованию держащей силы отданного якоря в сочетании с силами от гребного винта и руля.
Рассмотрим возможности выполнения некоторых маневров, связанные с использованием якорного устройства судна.
Развороты на ограниченной акватории. Если на судне с отданным на грунт якорем, цепь которого натянута назад параллельно ДП, переложить руль на один из бортов и дать передний ход двигателю, то корма судна под влиянием боковой силы руля Рру, обтекаемого струей от винта, получает боковое перемещение в сторону, противоположную перекладке руля. Продольного перемещения судно в начальном периоде не получает, так как сила упора винта Ре компенсируется . держащей силой якоря Яя, поэтому вращение вначале происходит вокруг полюса поворота, положение которого зависит, как было показано в п. 6.1, от точки приложения поперечной силы. В данном случае поперечная сила Рру создается рулем, следовательно, приложена примерно на расстоянии 0,5L в корму от ЦТ, поэтому в соответствии с графиком хпп= =/(Jcp) (см. рис. 6.5) будет находиться приблизительно на расстоянии
15L в нос от ЦТ.
Если якорная цепь вытравлена на такую длину /ц, при которой и корь будет находиться под днищем судна в районе полюса поворота (в рассматриваемом случае этому соответствует /U«0,35L), то судно и в дальнейшем будет продолжать вращение вокруг ПП без поступательного движения (если якорь не драгирует). Следовательно, оно может быть развернуто пргистия^сТаРпа месте на любой угол, как это показано на рис. 6.6, а.
Если вытравляю якорной цепи меньше чем 0.35L, то ПП смещается в нос, и врадание судна будет происходить по-прежнему вокруг точки, находящей^ примерно над лежащим на грунте якорем (рис. 6.6,6), но с/несколько меньшей угловой скоростью, чем в случае /ц= = 0,35L. /
Уменьшение угловой скорости связано с тем, что ЦТ в данном случае/будет описывать дугу большего радиуса, а это приводит к возрастанию демпфирующего гидродинамического момента.
/Если же якорной цепи вытравлено больше чем 0,35L, то после начала вращения между ДП и направлением якорной цепи образуется более или менее значительный угол (рис. 6.6, в), а это приводит к появлению поперечной составляющей натяжения якорной цепи, приложенной к носовой оконечности и способствующей развороту судна. Следует учитывать, что при таком вращении судно приобретает некоторое поступательное движение, поэтому нужное для разворота пространство возрастает.
Во всех рассмотренных случаях разворота с использованием отданного на грунт якоря необходимо, чтобы сила упора винта не превышала держащей силы якоря.
В противном случае якорь поползет, и судно может не вписаться в имеющуюся акваторию.
Маневрирование с отданным якорем (якорями). При маневри* ровании на ограниченной акватории, связанном с необходимостью строго придерживаться заданной траектории и совершать крутые повороты на минимальной скорости, можно воспользоваться отданным на грунт якорем с небольшой длиной якорной цепи.
 При
протаскивании якоря по грунту создается
тормозящая сила, что позволяет увеличивать
частоту вращения винта без крайне
нежелательного в этих условиях
увеличения скорости судна. Увеличение
частоты вращения винта резко
увеличивает эффективность руля,
находящегося в струе, отбрасываемой
винтом, что позволяет совершать крутые
повороты на ограниченной акватории.
Кроме того, протаскивае-
При
протаскивании якоря по грунту создается
тормозящая сила, что позволяет увеличивать
частоту вращения винта без крайне
нежелательного в этих условиях
увеличения скорости судна. Увеличение
частоты вращения винта резко
увеличивает эффективность руля,
находящегося в струе, отбрасываемой
винтом, что позволяет совершать крутые
повороты на ограниченной акватории.
Кроме того, протаскивае-
Рис.
6.6. Разворот судна на месте с использованием
отданного якоря:
а — длина вытравленной якорной цепи равна примерно 0,35 L; б — длина вытравленной цепи меньше 0.35 L\ в — длина вытравленной цепи больше 0,35 1,
Особенно эффективно использование протаскиваемого по грунту якоря при маневрировании в условиях ветра, позволяющее сохранять управляемость при минимальных скоростях. Если при этом одного якоря ока-
судна.
мый
по грунту якорь помогает при
необходимости быстро погасить
инерцию
Рис.
6.7. Использование протаскиваемого по
грун- ет
еще больше увеличить
ту
якоря при маневрировании
л
зывается недостаточно, то отдают второй,
что позволя-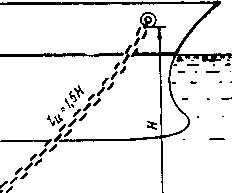
![]()
При маневрировании рассмотренным способом существует опасность резкого увеличения натяжения якорной цепи и ее обрыва из-за сильного зарывания лап якоря в грунт или его зацепа и попадания в расселину скальной породы.
Во избежание обрыва цепи и потери якоря рекомендуется вытравливать в воду полторы глубины (/и«1,5 Н). При выполнении этого условия наклон натянутой якорной цепи по отношению к грунту составляет, как эго видно из рис. 6.7, угол 45°, поэтому лапы якоря, способные поворачиваться относительно веретена тоже на угол 45°, будут при протаскивании располагаться параллельно грунту, не зарываясь в него.
Торможение с использованием якорей, протаскиваемых по грунту. Если движение судна происходит в районе с небольшими глубинами (подходы к портам, фарватеры, каналы и т. п.), го в случае возникновения аварийной ситуации, требующей экстренного торможения, наряду с реверсированием двигателя на полный задний ход могут быть использованы для сокращения тормозного пути судовые якоря. В этом случае одновременно с командой о реверсировании двигателя подается команда об отдаче якоря или обоих якорей с указанием количества смычек, которое должно быть вытравлено в воду, после чего задержано ленточным стопором.
Дополнительный эффект от использования якорей при торможении зависит от их держащей силы, которая в свою очередь зависит от веса якоря, характера грунта и длины вытравленной якорной цепи.
Дифференциальное уравнение движения судна при торможении с использованием якоря (якорей), протаскиваемого по грунту, имеет вид
т. е. отличается от уравнения (3.29) только дополнительным слагаемым константой а*, которую назовем коэффициентом торможения якорем.
Коэффициент а„ выражается (по аналогии с коэффициентом актив ности торможения а) отношением
![]()
де Ря —держащая сила якоря (якорей), Н; к — коэффициент сопротивления, кг/м;
Vn — начальная скорость судна при торможении, м/с.
После подстановки в (6.10) =1/ разделения перемен
ных и интегрирования в пределах от VH до 0 получим формулы для определения тормозного пути до полной остановки с учетом использования якоря в зависимости от значения коэффициента активности, торможения а:
аф 1
mx/k In --
>; I'D. !2l
(1 —а) ан
а-^1 mxjk
!Ч|
2(1-'- «я)
(де s — тормозной путь до полной остановки, м.
Отметим, что выведенные формулы позволяют определить тормозной путь после реверса двигателя и задержания якорной цепи (предполагается, что винт и якорь^начинают действовать одновременно). Для получения полного тормозного пути. т. е. с момента отдачи команды, нужно учесть также путь первого и второго периодов.
Формулы позволяют определить тормозной путь и для случая торможения только якорем при остановленном двигателе, если принять а=0, а также для торможения только двигателем без использования якоря, если принять а* = 0.
Вместо расчета по формулам тормозной путь можно определить по диаграмме, построенной инженером-судоводителем С. А. Дудником, которая приведена в прил. 3. Данная диаграмма позволяет по параметрам а, а„ и A/k определить тормозной путь, кб.
Параметры A/k и а определяются так, как это показано в примерах, приведенных в гл. 5, а параметр ач — по формуле (6.11).
Для достижения наилучшего эффекта следует вытравливать минимальную длину якорной цепи, обеспечивающую держащую силу якоря при данном характере грунта. Вытравливание излишней длины цепи скорее всего увеличит полный тормозной путь, так как при этом полезное действие якоря наступит позднее. Кроме того, с увеличением длины вытравленной цепи возрастает вероятность ее обрыва из-за зарыва* ния якоря в грунт.
Наилучший результат можно получить, если отдать два якоря с вытравливанием цепей на минимально требуемую длину.
Во всех случаях использования якоря при маневрировании необходимо учитывать возможность повреждения якорем* обшивки днища, если отсутствует запас воды над килем. *1
Способы уменьшения пути судна
при экстренном торможении на глубокой воде
Морские суда, особенно крупнотоннажные, но сравнению с другими транспортными средствами обладаю! весьма низкой энерговооруженностью, иод которой подразумевается мощность двигателя, приходящаяся на единицу водоизмещения. Следствием этого являются большие тормозные пути и, следовательно, частые аварийные ситуации.
В исследованиях, связанных с поиском средств и методов сокращения тормозных путей, можно выделить два основных направления: создание специальных дополнительных тор- 5 мозных устройств (выдвижные тормозные щиты, тормозные парашюты, пассивные трубопроводные системы и др.);
Рис.
6.8. Принципиальная схема установки
тормозных щитов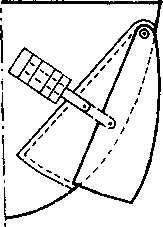
Рассмотрим подробнее некоторые средства и способы уменьшения тормозных путей.
Тормозные щиты. В Нидерландах было предложено дополнительное тормозное устройство в виде двух выдвижных щитов, размещаемых по обоим бортам в районе носового заострения судна. Для установки этого устройства борта в носу судна должны иметь специальные водонепроницаемые ниши. Каждый тормозной шит изготавливается в виде двух параллельных металлических пластин, соединенных между собой трубчатыми элементами, увеличивающими жесткость конструкции. Наружная кромка щита повторяет внешние обводы корпуса по данному шпангоуту, поэтому в убранном состоянии кромки тормозных щитов располагаются заподлицо с наружной обшивкой. Так как тормозные щиты устанавливаются в районе носового заострения, то в выдвинутом положении они не выступают за габариты миделево- го сечения.
Выдвижение и уборка щитов производятся с помощью специального гидравлического привода, для установки которого предусматривается водонепроницаемый отсек, располагаемый вблизи ДП между нишами для тормозных щитов правого и левого борта.
Принципиальная схема установки тормозных щитов показана на рис. 6.8.
Как показали модельные эксперименты, применение тормозных щитов, общая площадь которых составляет около 18 % от площади погруженной части мидель-шпангоута, увеличивает силу сопротивления воды почти в 3 раза.
Тормозные парашюты. Идея использования парашютов в качестве дополнительного тормозного устройства заимствована у авиации, где подобные парашюты применяются для уменьшения длины пробега реактивных самолетов после посадки. Разница заключается в том, что парашюты на судах действуют в воде, т. е. в среде, которая в 832 раза плотнее воздуха.
Имеются два варианта применения парашютов: два парашюта, выпускаемых в воду по одному с каждого борта, или один парашют, выпускаемый с кормы.
Пассивная трубопроводная система. Данное устройство,состоит и центрального канала внутри носовой части корпуса судна с входным отверстием на форштевне ниже ватерлийии, соединяющегося с поперечным каналом, который заканчивается бортовыми отверстиями. После открытия носового входного отверстия вода устремляется сквозь продольный канал, а затем поворачивает на 90° и выходит через бортовые отверстия. Сопротивление, создаваемое каналом, зависит от площади его поперечного сечения, а также от условий протекания воды в канале и при выходе из бортовых отверстий.
Среди других технических возможностей сокращения тормозных путей на больших глубинах особо следует отметить предложение проф М. М. Лескова использовать для аварийного торможения вытравлива ние в воду якорей с 1,5—2 смычками цепи. Следует, однако, отметить что обычный брашпиль не приспособлен для быстрой и безопасной от дачи якорей в воду и уверенного задерживания цепей на большой ско рости судна.
 Специально
проведенные за рубежом экс- лерименты
с самоходными моделями при использовании
тормозных щитов совместно с ре- персом
двигателя показали, что при изменении
площади щитов в пределах 20—40% от площади
погруженной части мидель-шпангоута
тормозной путь уменьшается на 6—25%.
Специально
проведенные за рубежом экс- лерименты
с самоходными моделями при использовании
тормозных щитов совместно с ре- персом
двигателя показали, что при изменении
площади щитов в пределах 20—40% от площади
погруженной части мидель-шпангоута
тормозной путь уменьшается на 6—25%.
Приведенные цифры показывают, что дополнительные тормозные устройства не обеспечивают радикального решения проблемы уменьшения тормозного пути судов.
 Торможение
с использованием перекладок
руля.
Переложенный
на борт руль резко увеличивает общее
лобовое сопротивление волы, что
приводит к значительному снижению
скорости судна, несмотря на то, что
двигатель продолжает работать вперед
в прежнем режиме. Особенно резкое
снижение скорости наблюдается сразу
же после перекладки руля, а затем, по
мере входа судна в циркуляцию снижение
скорости замедляется и постепенно
скорость приходит к новому установившемуся
значению.
Торможение
с использованием перекладок
руля.
Переложенный
на борт руль резко увеличивает общее
лобовое сопротивление волы, что
приводит к значительному снижению
скорости судна, несмотря на то, что
двигатель продолжает работать вперед
в прежнем режиме. Особенно резкое
снижение скорости наблюдается сразу
же после перекладки руля, а затем, по
мере входа судна в циркуляцию снижение
скорости замедляется и постепенно
скорость приходит к новому установившемуся
значению.
.
*t.2L
|
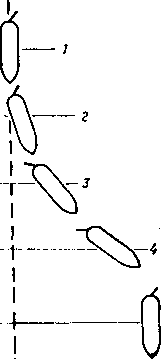
Рис.
6.9. Маневр экстренного торможения с
использо- ваниек последовательных
перекладок руля:
1
— начальный курс — лево на борт: 2
— изменение курса влево на 20“ —
средний вперед; 3
— изменение курса влево на 40° — право
на борт: 4
—
максимальное отклонение влево —
малый вперед: 5 — начальный курс •—
лево на борт; 6
- максимальное отклонение вправо —
самый малый вперед; / — начальный курс
— право на борт — полный назад; 8
— остановка судна - стоп машина
Затем, когда поворот судна в направлении первоначальной перекладки руля будет остановлен, следует по машинному телеграфу уменьшить ход на одну ступень, т. е. с ПХП
на £ХП, чтобы предупредить отрицательный эффект увеличения упора винта из-за снижающейся скорости судна.
В дальнейшем описанный цикл операции повторяется, т. е. после поворота на первоначальный курс руль снова перекладывается на противоположный борт, а после одерживания поворота режим работы двигателя снова снижается на одну ступень и т. д. В последнем цикле, когда телеграф будет находиться в положении «Самый малый вперед», при возвращении судна на первоначальный курс следует одновременно с перекладкой руля на противоположный борт поставить телеграф в положение «Полный назад» с тем, чтобы полностью остановить движение относительно воды. Судно обычно останавливается на небольшом расстоянии (порядка 0,5L) от линии первоначального курса с той стороны, куда был переложен руль в начале маневра.
Описанный маневр экстренного торможения гю сравнению с традиционным маневром ПХП—ПХЗ, обладает весьма существенными преимуществами, так как, помимо уменьшения полного тормозного пути, позволяет сохранить контроль над судном в течение почти всего маневра и избежать реверсирования с полного переднего хода, во время которого наблюдаются’значительные перегрузки двигателя и нередко случаются его отказы.
Уменьшение тормозного пути при данном способе маневрирования зависит от водоизмещения судна. На крупнотоннажных судах положительный эффект проявляется в большей степени, так как за счет низкой энерговооруженности они обладают плохими тормозными качествами, а относительное снижение скорости за счет перекладки руля у крупнотоннажных судов не хуже, чем у судов среднего и малого тоннажа. По данным исследовательского и тренажерного центра в Гренобле (Франция). путь экстренного торможения с помощью перекладок руля у крупнотоннажных танкеров по сравнению с обычным реверсированием двигателя сокращается приблизительно на одну треть.
В этом тренажерном центре с использованием масштабных управляемых моделей разработан и предложен маневр экстренного торможения (рис. 6.9). Этот маневр отличается от описанного ранее лишь тем, что в первом цикле торможения обратная перекладка руля выполняется при отвороте не на 20, а на 40°, благодаря чему судно в процессе торможения больше отклоняется в сторону от линии первоначаль- ного пути и останавливается на расстоянии около 1,2L от этой линии, т. е. дальше, чем при выполнении ранее описанного маневра.
Экспериментальное торможение, выполненное на теплоходе «Большевик М. Томас» с полного маневренного хода (Л —22 850 т) по схеме, предложенной французским тренажерным центром, дало сокращение тормозного пути по сравнению с обычным торможением приблизительно на 17%, что подтверждает сделанное заключение о меньшей эффективности рассматриваемого маневра для судов меньшего тоннажа.
Как установлено натурными экспериментами, с началом вращения винта на задний ход руль теряет эффективность и перестает оказывать заметное влияние на направление и скорость движения судна.
Контрольные вопросы. 1. Какими дополнительными маневренными возможностями обладает судно, имеющее носовое подруливающее устройство? 2. Какое из средств активного управления позволяет произвольно изменять положение полюса поворота по длине судна? 3. Для каких целен и каким образом может быть использован отданный на грунт якорь при маневрировании на ограниченной акватории? 4. Какие устройства предназначаются для сокращении тормозного пути при экстренном торможении и какова их эффективность? 5. Как выполняется маневр экстренного торможения с использованием перекладок руля?
аздел второй ТЕ0РИЯ И ПРАКТИКА УПРАВЛЕНИЯ СУДНОМ В РАЗЛИЧНЫХ ОБСТОЯТЕЛЬСТВАХ
Г лава 7. УПРАВЛЕНИЕ СУДНОМ ПРИ ВЫПОЛНЕНИИ БУКСИРОВОЧНЫХ ОПЕРАЦИИ
Виды морских буксировок
Морские буксировки относят к особым случаям морской практики, гак как этот вид работы связан с весьма сложным маневрированием при самых разнообразных обстоятельствах и при условии управления объектом, состоящим из двух или более судов.
Имеется несколько способов расположении буксирующих судов и буксируемых объектов.
Буксировка в кильватер осуществляется при морских и дальних -жеанских плаваниях; буксировка борт о борт — в iiopiax. па хорошо защищенных от морской волны акваториях; буксировка толканием - преимущественно на реках и озерах. В настоящее время буксировка юлканием стала применяться и на море. Сочлененные барже-буксир- пые составы, состоящие из очень больших (дедвейтом примерно К) ООО т), оборудованных высокими стойками барж и мощных буксиром » устройством для соединения с баржей в носовой части, иепольчуытся чля перевозок круглого леса из советских дальневосточных нор юн в Японию.
Буксирный караван может состоять из двух судов -- буксируhuium о и буксируемого, либо из нескольких буксирующих судов и одного круп кого плавучего объекта, либо из мощного буксирного судна и состава из нескольких буксируемых плавсредств.
По назначению буксировки могут быть плановыми и случайными (вынужденными).
Плановая буксировочная операция готовится заранее, и объект буксировки (несамоходное судно, плавкран, плавдок, буровая вышка и дру гие плавучие сооружения) оборудуется специальными устройствами и !ехническимн средствами, а все предварительные расчеты по буксировке и рекомендации капитанам буксирного каравана готовятся специа- жстами научных учреждений ММФ и опытными капитанами.
Морские и океанские буксировки в кильватер за кормой на буксирном канате. Подобные буксировки выполняют после т^цательной подго твки, в которую входят: проработка рейса с учетом, гидрометеороло- шческих факторов, оборудование каравана буксирными принадлежно-
1ями, техническими средствами, необходимыми для обеспечения безопасности буксирной операции (линеметательные установки, средства аварийной связи, спасательные средства). В таких случаях используют мощные буксирные судна с неограниченным районом плавания или ранспортные суда, которые дополнительно оборудуют средствами для крепления буксирных тросов либо используют для этой пели штатное оборудование, расположенное в кормовой части судна. К плановым буксирным операциям чаше всего привлекают буксиры-спасатели и ледоколы.
Дальними морскими и океанскими экспедиционными буксировками, при организации и проведении которых должны выполняться определенные условия, считаются следующие: при экспедициях из портов Баренцева и Белого морен по Северному морскому пути и за меридиан мыса Нордкап; из Балтийского моря за линию мыс Скаген — мыс Лин- неснес и через Кильский канал за Брунсбюттельког; из Черного и Азовского морен за проливы Босфор и Дарданеллы; из Дальневосточных портов на расстояние более 1000 миль между портами Дальнего Востока, на юг — за Корейский пролив, на север — за Берингов пролив, а также на восток с удалением в Тихий океан более 1000 миль от берега.
Условия, которые должны выполняться во время дальних морских и океанских экспедиционных буксировок, установлены рядом документов Минморфлота СССР, Госкомгидромета и других государственных органов. В числе основных условий определены сроки буксировочных экспедиций по времени года, типы буксируемых объектов (суда, плавучие доки, плавучие краны), мореходность буксируемых объектов (например, объекты, мореходность которых менее 4 баллов по волнению моря, к буксировкам не принимаются), рекомендованные районы плавания и др.
Вынужденные буксировки аварийных судов могут выполняться буксирами-спасателями экспедиционного отряда АСПТР или транспортными судами, находящимися вблизи бедствующего судна. Капитан буксирующего судна на месте принимает решение о способе крепления буксирного троса, его длине, скорости движения каравана и выборе пути следования.
Длину буксирного каната или составной комбинированной буксирной линии определяют исходя из условий безопасного расстояния между буксирующим и буксируемым судами. Увеличение расстояния между судами при буксировке может быть достигнуто упругой деформацией и распрямлением цепной линии троса, а также увеличением длины буксирного троса с помошью автоматической буксирной лебедки.
Буксирные тросы всех типов надо рассматривать с точки зрения того, насколько они удовлетворяют требованию обеспечения свободного орбитального движения судов при плавании на волнении. Из теории цепной линии следует, что провес цепной линии прямо пропорционален массе троса. Значит при одинаковом натяжении чем больше линейная плотность буксирного троса, тем больше разница между / и х (рис. 7.1).
Очень важно, чтобы буксирный трос был удобен при работе (подача, крепление, отдача). Наиболее подходит для этого стальной трос. Якорная цепь из-за большой массы неудобна, особенно на корме буксирующего судна. Манильский и сизальский тросы, хотя и обладают плавучестью, т. е. удобны при завозе, но громоздки, поэтому их труднее крепить, чем стальные. Кроме того, эти тросы портятся от трения
Рис.
7.1 Д.жиа / и провес / пуксрриои линии

Рис.
7.2. Типы буксирных линий:
I
- стальной трос; 2—
якорная цепь; 3
— синтетический трос
и при длительных буксировках могут потерять свою прочность в результате гниения. Перед укладкой на хранение их требуется промывать и просушивать. На буксирных судах все чаше применяют синтетические буксирные тросы.
Для облегчения работы с тросами и получения достаточно большого провеса применяют комбинированные буксирные линии.
На рис. 7.2, а представлена комбинированная буксирная линия, при которой буксирный трос прикреплен к якорной цепи и несколько смычек вытравлено за борт. Этот метод весьма распространен. Его преимущества заключаются в следующем: буксирный канат удобно крепится на буксируемом судне; можно и удлинить, и укоротить буксирную линию; тяжелый участок цепи дает сравнительно большую стрелу провеса, которую можно увеличить, не отклепывая от цепи якоря, а закрепив за его скобу буксирный трос и стравив якорную цепь вместе с якорем.
На рис. 7.2,6 дан другой вид комбинированной буксирной линии, где от буксируемого судна примерно до серединьь линии идет синтетический трос, а далее до буксирующего судна — стальной трос. Такая комбинация может быть применена в случае, если необходимо исполь- ювать то буксирное снабжение, которое есть на судах. Введение в буксирную линию растительного или синтетического троса с упругостью, значительно большей, чем упругость стального троса, делает такую комбинацию приемлемой.
Преимущество этого метода в том, что при сравнительно небольшой стреле провеса обеспечивается хорошее упругое удлинение. Нет необходимости укорачивать буксирную линию при прохождении по небольшим глубинам. Введение в буксирную линию автоматической лебедки удовлетворяет основному требованию морской буксировки по обеспечению свободного орбитального движения судов при плавании на волнении. Имея тягу, равную упору винта, буксирная лебедка в случае превышения на буксирном тросе предусмотренного усилия начинает травить буксирный трос и, наоборот, когда усилие уменьшается, выбирает его слабину.
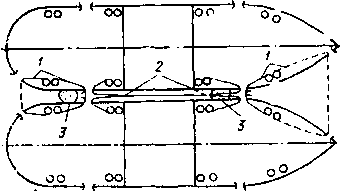
Буксировка судов борт о борт (лагом). Она может быть осуществлена в закрытых водах, когда нет достаточного места для буксировки на буксирном тросе за кормой, и в тех случаях, когда на море нет значительного волнения. Расположение буксирующего судна сбоку от буксируемого дает хорошую управляемость обоим судам. Этот метод буксировки применяют при перегрузке грузов в море (рис. 7.3).
Рис.
7.11.
Ьуксировка борт о борт:
/
— буксируемое судну. // буксирующее
суано; / - прижимной швартов; '2
ишрипг;
3
— кранец
I
л
При подготовке к буксировке лагом очень важно как можно гуже обтянуть швартовы, чем достигается предотвращение или смягчений ударов судов одно о другое. Однако обтянуть тросы абсолютно туго невозможно, поэтому всегда остается некоторая слабина, а следовав тельно, будут и взаимные удары судов. Для смягчения ударов кеоб^ ходимо между судами закладывать надежные, желательно мягкие кранцы. Кранцы должны располагаться против шпангоутов и опирать^ ся на палубы или бортовые стрингеры.
На рис. 7.3 штриховой линией показано расположение швартовов; при котором возникает разворачивающий момент с наибольшим плечом. Такая проводка швартовов обеспечивает тягу судна на длинных тросах, что, конечно, целесообразно, так как при длинных тросах в большей степени используется упругость троса, чем при коротких (потенциалу ная энергия деформации растяжения прямо пропорциональна длине троса).
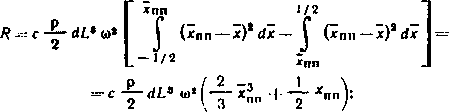
Буксировка судов толканием. Сущность этого способа заключается в том, что буксир-толкач располагается за кормой толкаемого судна^ шарнирно с ним скрепленного, и толкает его вперед (рис. 7.4).
При таком расположении буксирующего и буксируемого судов: уменьшается сопротивление корпуса буксира-толкача, так как он движется в попутном потоке буксируемого судна;
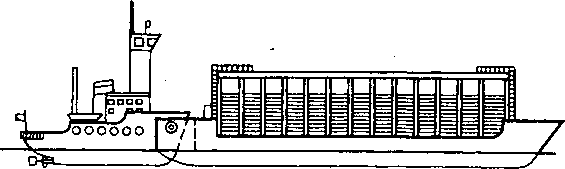
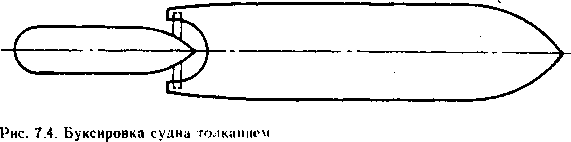 уменьшается
сопротивление баржи из-за отсутствия
струй,
отбрасываемых движителем буксировщика
при обычном способе буксировки;
уменьшается
сопротивление баржи из-за отсутствия
струй,
отбрасываемых движителем буксировщика
при обычном способе буксировки;
отсутствует сопротивление буксирного каната;
возрастает устойчивость на курсе вследствие жесткого соединения пуксира-толкача с баржей.
При современных способах соединения буксира-толкача с баржей, мри котором оба судна имеют шарнирное зацепление системы Кап- юра и стабилизирующую противокренную систему Флюма, обеспечивается безопасное плавание на волнении.
Барже-буксирный состав снабжен буксирным тросом, уложенным мдоль левого борта баржи и соединенным с полуавтоматической лебедкой на корме буксира.
При необходимости буксировки в кильватер состав разъединяют, и буксир, поставивший баржу носом к ветру, проходит у нее по левому (юрту вперед.
Буксир в условиях одиночного (не сочлененного с баржей) плавания имеет относительно небольшую метацентрическую высоту, поэтому управление им в штормовую погоду обязывает судоводителя строго соблюдать все рекомендации по управлению судами с недостаточной остойчивостью. В одиночном плавании в благоприятную погоду буксир-толкач на полном ходу получает на циркуляции крен, численно равный углу перекладки руля. Большой крен на циркуляции объясняется малой метацентрической высотой и относительно большой высотой ходового мостика.
Первые успехи в использовании барже-буксирных составов в мировой практике морских перевозок привели к созданию буксирных систем дедвейтом в несколько десятков тысяч тонн, используемых не юлько для перевозки леса, но и других грузов: навалочных, насыпных, контейнеров, нефтепродуктов, труб большого диаметра.
Буксировка морских лихтеров. Буксировка лихтеров, на которых имеется команда, принципиально не отличается от буксировки обычных транспортных судов с экипажем на борту, но с бездействующими машинами.
Задача облегчается тем, что на лихтерах предусмотрено буксирное устройство, рассчитанное на буксировку их морем, поэтому нет необходимости решать вопрос о креплении буксирной линии.
По-иному обстоит дело с баржами, которые буксируют без команды. Для уменьшения рыскливости буксируемых судов надо принимать меры, обеспечивающие устойчивость их на курсе. К таким мерам относятся крепление буксирной линии как можно дальше вперед от центра тяжести судна и создание дифферента на корму.
При подготовке судна без экипажа к буксировке все люки и трапы с верхней палубы в нижние помещения должны быть надежно закрыты. Если имеется двигатель, то гребной винт надо отключить от него, чтобы не повредить цилиндры двигателя, либо надежно заклинить, чтобы двигатель не проворачивался. Надо предусмотреть возможность высадки людей на палубу буксируемого .судна на случай необходимости, например осмотра буксирного устройства. Кроме того, должно быть обеспечено действие огней согласно МППСС-72.
Буксировка плавучих сооружений. Буксировка доков, кранов, буро- (шх вышек и других крупных плавучих объектов наиболее сложна. Подготовка к такой буксировке ведется по заранее подготовленному плану.
Буксирная линия при буксировке крупных плавучих объектов является, как правило, составной из цепей и прочных стальных тросов. Наиболее уязвимые места буксирной линии (места соприкосно-
Рис.
7.5. Соединение буксирной линии:
/
— буксирный трос; 2
— скобы; 3 — тройник; 4
— цепь; 5 — стальные тросы
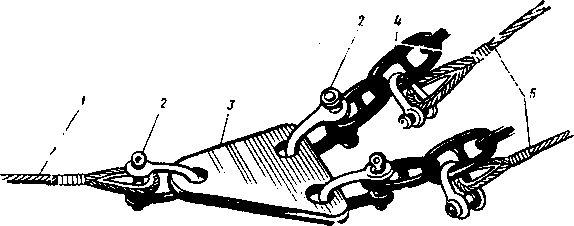
вения тросов в клюзах и в соединениях) должны иметь повышенный запас прочности и приспособления для уменьшения перетирания. Кон| цы тросов заделывают огонами с прочными коушами, скобы крепя1 так, чтобы при переменных нагрузках они не отдались. При соедине*| нии тросов и цепей применяют металлические плиты, увеличивающий провисание буксирного троса, либо тройники (рис. 7.5).
Одной из проблем при буксировке крупных объектов является уменьшение рыскания, так как буксировка происходит на очень длинЛ яых буксирных тросах. Для уменьшения рыскания применяют буксиС руемые «волокуши», используют малые буксирные суда, сдерживаю! щие рыскание объекта. Рыскание увеличивается при боковом и попут! ном ветре. Попутное волнение увеличивается в буксирнок тросе.
Буксировка больших плавучих сооружений выполняется обычнс несколькими буксирными судами, которые выстраиваются в линии либо «веером». При прохождении узкостей и входе в порт буксирная! линия укорачивается и буксирующие суда перестраиваются, чтобы обе-f спечить безопасность буксируемого объекта и лучшее маневрирование буксирного каравана.
Расчеты при морской буксировке
Выбор буксирной линии. В первую очередь необходимо определить! ее размеры, при которых она сохраняет свою прочность. Если невоз-| можно полностью удовлетворить условиям буксировки конструкцией! буксирной линии, то необходимо выбрать метод буксировки путем из-! менения скорости движения.
При расчете буксирной линии выбор ее элементов бывает возмо-J жен, когда подготовка к буксировке проводится в оборудованном порту, и невозможен, когда приходится брать на буксир судно в огкры-1 том море или в необорудованном порту. В этом случае используют то, | что имеется на борту буксирующего и буксируемого судов.
Если выбор элементов буксирной линии возможен, то в зависи- ] мости от условий плавания определяют:
тягу на гаке в нормальных условиях плавания (на тихой воде) и] при штормовом ветре;
разрывное усилие элементов буксирной линии умножением тяги j на гаке на коэффициент запаса прочности;
элементы буксирной линии, пользуясь справочниками по разрывному усилию;
длину буксирной линии;
увеличение расстояния между судами при выбранной буксирной линии для тяги на гаке в нормальных условиях и при нагрузке на гаке в штормовых условиях.
полученную «игру» буксирной линии с высотой волны в районе предстоящего плавания.
Если результаты расчета оказываются неудовлетворительными, выбирают другую буксирную линию.
В описанном выше методе расчета буксирной линии за исходную величину принят максимальный упор винта.
Если выбор элементов буксирной линии ограничен, например в случае взятия судна на буксир в открытом море, то:
выбирают длину буксирной линии исходя из длин тросов, имеющихся на буксирующем и буксируемом судах;
определяют случайную нагрузку на буксирную линию делением разрывного усилия буксирного каната на два и рабочую нагрузку его делением на принятый коэффициент запаса прочности;
рассчитывают степень расхождения судов и сличают значение расхождения с высотой волн в районе плавания.
Исходной величиной для расчета в этом случае является прочность троса, а не упор винта.
Рассмотренные буксирные линии состоят из троса или цепи. Однако возможны и другие буксирные линии, например:
однородная буксирная линия с грузом, введенным в какую-либо ее точку;
неоднородная буксирная линия, состоящая из различных по конструкции и материалу тросов или тросов и цепи;
неоднородная буксирная линия с грузом, введенным в какую-либо гочку буксирной линии.
Теоретические основы морской буксировки. При плавании на тихой иоде горизонтальная составляющая натяжения буксирного троса равняется тому сопротивлению, которое оказывает буксируемое судно при данной скорости. Сопротивление буксируемого судна и собственное сопротивление преодолеваются упором гребного винта (буксировщика).
При неравномерной работе машин буксировщика, рыскании буксирующего и буксируемого судов, страгивании с места в начале буксировки, резком повороте буксировщика, внезапно налетевшем шквале и в некоторых других случаях, когда наблюдаются рывки и появляются динамические нагрузки, в буксирном тросе могут возникнуть усилия большие, чем максимальный упор гребного винта буксировщика.
Перечисленные выше причины возникновения в буксирном тросе значительных усилий, превышающих максимальный упор винта, встречаются как при работе на тихой воде, так и при буксировке в штормовых условиях. Но при плавании на взволнованном море или на мертвой зыби в буксирном тросе могут возникнуть усилия, которые но много раз превысят нормальные значения тяги. Это объясняется гем, что буксирующее и буксируемые суда то сближаются, то удаляются друг от друга, вследствие чего натяжение буксирного троса все время изменяется. При таком орбитальном движении центр тяжести каждого из судов, если бы оно было свободным, описал бы около своего среднего положении некоторую орбиту.
Уравнения такой орбиты в параметрической форме:
х - a cos (2л//т); (7 .1)
I/ 6 sin (2л/ т). (7.2)
где г - период волны, с;
а и Ь — некоторые постоянные дли данного судна и данной волны.
Академик А. Н. Крылов показал, что величина а и b не превышают половины высоты волны. Следовательно, если взять значение а равным половине высоты волны, то будет учтен наихудший случай.
В приведенном выше уравнении нас интересует только величина л, которая представляет собой изменение расстояния между судами на качке. Влияние вертикальных колебаний судов на усилия в буксирном канате при принимаемых в морских буксировках длинах буксирных линий практически ничтожно.
Определим усилия, возникающие при горизонтальных перемещениях буксирующего и буксируемого судов вследствие их орбитального движения при плавании на волнении. Определим характер ускорения движения судна на волнении: