

Глава 19. Расхождение судов в условиях ограниченной видимости х 19.1. Статистика столкновений
Почти две трети (68,4 %) столкновений судов мирового морского флота приходятся на условия ограниченной видимости. Эти столкновения следующим образом распределяются (%) в зависимости от курсового угла (градусы) сближения:
Курсовые углы Частота
столкновения
Глава 2. Сведения об управляемости 2.1. Устойчивость на курсе и поворотливость 17
2.2.Движение судна под влиянием переложенного руля 22
2.3.Влияние параметров корпуса и руля на управляемость 27
2.4.Влияние боковых сил, обусловленных работой гребного винта 30
2.S. Управляемость одновинтового судна на заднем ходу 36
2.6.Управление многовинтовым судном 37
Глава 3. Инерционно-тормозные характеристики судна 3.1. Общие сведения об инерционно-тормозных свойствах судна 38
3.2.Движение при изменениях режиме работы двигателя на переднем ходу 44
3.3. Торможение судна 32
(з!9> 36
(1+1/ГГТ)(,. у ,/7П) 37
7- _о,5, 40
4.2.Ветровой дрейф 41
,; = 2(«° -45° + 1807ц„). (4.24) 47
4.3.Маневрирование в условиях ветра 49
Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 55
5.2.Определение маневренных элементов из натурных испытаний 55
5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62
г. 72
6.1.Средства активного управлении (САУ) 73
6.3.Использование якорей при маневрировании 83
л 94
JjL Р т 117
7.4.Управление судами при буксировке 136
Глава 8. Снятие судна с мели 8.1. Причины посадки судов на мель 141
8.2.Действия экипаже судна, севшего на мель 142
/п,(1 !-*.?,) 150
Q = ^cp F, (9.14) 159
ч 182
V -$г+‘ • 212
лгг 250
t©^'=0^>^00==£Э— 291
Курсовые
углы Море
Менее
5 16,4 . . .
От
5 до 112,5 3,5 .. .
Более
112,5 0,0 .. .
С
судном, стоящим на якоре 6,7 .. .
Узкость Итого
60,0 . . . 76,4
.. . 10,2
.. . 6,7 0,0 .. . 6,7
Позднее
обнаружение ......
В
том числе: не обнаружены с помощью РЛС
обнаружены в дистанции 0,2—1,0 мили » »
» 1—3 мили
Превышение
скорости
Пренебрежение
графической прокладкой Бездействие
при своевременном обнаружении
Запоздалые
действия
Необоснованные
предположения
72.9
28,2 18,8 64,7
42.9
52,0 14,!
В приводимых основных причинах столкновений сумма превышает 100 %, так как при столкновении может быть одновременно несколько основных нарушений.
Радиолокационное наблюдение
Среди действий, которые должны выполнить вахтенный помощник капитана при ухудшении видимости или при подходе к зоне ограниченной видимости, одним из важнейших является организация надлежащего визуального, слухового и радиолокационного наблюдения. Визуальное и слуховое наблюдение обеспечивается выставлением в достаточно удаленном от своих ходовых огней и судового шума месте проинструктированного впередсмотрящего, имеющего надежную связь с мостиком. Надлежащее радиолокационное наблюдение является основой и главным резервом повышения безопасности расхождения судов в условиях ограниченной видимости. Как видно из приведенных выше статистических данных, в 73 % столкновений судов в условиях ограниченной видимости было запоздалое радиолокационное обнаружение или необнаружение цели по РЛС. Своевременное обнаружение цели обеспечивается правильной настройкой исправного индикатора РЛС, надлежащей организацией радиолокационного наблюдения и высокой ответственностью судоводителя за доверенные ему человеческие жизни, судно и груз.
Настройка РЛС. При выведенном усилении яркость экрана делают такой, чтобы линия развертки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими, затем вводят усиление. Лучшее положение
ручки «Усиление» такое, при котором по всей площади экрана появляется слабый мерцающий фон шумов приемника. Такое положение соответствует максимальной чувствительности приемника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к потере обнаружения небольших объектов, дающих слабые эхо-сигналы. Судоводители часто практикуют уменьшение усиления для выделения сильных эхо-сигналов. Делать это можно ненадолго, каждый раз восстанавливая нормальное усиление. Это же относится к периодам уменьшения усиления при просмотре части экрана, замаскированной засветкой от сильных осадков. Следует следить за яркостью изображения. Слабая яркость затрудняет наблюдение, а чрезмерная — вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать.
Уменьшение влияния помех. При наличии засветки от морских волн применяются временная автоматическая регулировка усиления (ВАРУ) или другие устройства устранения помех от волн. Область сплошной засветки уменьшают до нескольких флюктуирующих точек, на фоне которых можно выделить эхо-сигналы от объектов. Следует помнить, что одновременно с подавлением сигналов от волн подавляются и сигналы от малых объектов. Интенсивность помех от волнения уменьшается при использовании импульсов меньшей длительности, которые обычно применяются на шкалах более крупного масштаба. Поэтому бывает целесообразным переход на использование шкалы с меньшей дальностью, если при этом сокращается длительность импульса. Потеря дальности наблюдения может быть возмещена сдвигом начала развертки, если это обеспечивается РЛС. При наличии помех от осадков рекомендуется использование помехозащитного устройства при одновременном увеличении усиления. Для большего ослабления помех от осадков целесообразно использование диапазона 10 см и импульсов меньшей длительности.
Ложные сигналы из-за боковых лепестков могут быть подавлены с помощью устройства «Помехи от моря». Поскольку ВАРУ подавляет и полезный эхо-сигнал, его введение должно быть, кратковременным только для опознания ложных сигналов. Действительным при многократном отражении от близких объектов является только первый эхо- сигнал. Остальное можно убрать усилением, чтобы убедиться в том, где истинные, а где ложные эхо-сигналы. Ложные сигналы исчезают сами при увеличении дистанции или вменении взаимного ракурса объектов. Ложные эхо-сигналы от берега иногда маскируют эхо-сиг- налы малых судов, находящихся в зоне помех. Поэтому необходимо внимательно следить за этой зоной, периодически уменьшая усиление приемника.
Выбор режима индикации. Режим индикации выбирается исходя из конкретных условий плавания. В режиме относительного движения (ОД) наиболее наглядно и просто оценивается опасность столкновения и раньше обнаруживается изменение скорости. цЬлей, следующих пересекающимися курсами. В режиме истинного движения (ИД) раньше обнаруживаются малые неподвижные цели, нагляднее и проще выделяются цели движущиеся и неподвижные, раньше обнаруживается изменение курса встречными ‘судами. В то же время в режиме ИД сложнее оценка опасности столкновения и предполагаемой дистанции расхождения. Наиболее употребительным является режим ОД. При наличии на судне двух РЛС удобно один индикатор использовать в относительном, а другой — в истинном движении.
Выбор ориентации изображения. Наибольшую точность измерения пеленга, сопоставление радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «Север». При работе в этом режиме следует после каждого изменения курса проверять согласование индикатора РЛС с репитером гирокомпаса. В режимах ориентации «Курс» и «Курс стабилизированный» изображение на экране РЛС соответствует карт?ше, наблюдаемой визуально с мостика. В режиме «Курс» точность радиолокационного пеленгования и, как следствие, точность оценки опасности столкновения и предполагаемой дистанции расхождения существенно уменьшаются. При изменении курса судна или значительном рыскании происходит «смазывание» радиолокационного изображения.
Выбор шкал дальности. Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8—16 миль) с периодическим просмотром окружающей обстановки на шкалах как более мелкою, так и более крупного масштаба. В стесненных водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах. Шкалы дальности 32 и 64 мили используются для определений места судна по высоким берегам. После обсервации необходимо сразу перейти на шкалы средней или малой дальности для продолжения наблюдения. При расхождении с целями на близких расстояниях следует использовать крупномасштабные шкалы, на которых более точно оценивается степень опасности и быстрее обнаруживаются маневры целей.
Как правило, применительно к обстановке выбирается шкала, дающая разумный компромисс между наблюдением за ближними целями и достаточной дистанцией обнаружения новых целей. Совмещение этих противоположных требований может быть достигнуто применением крупномасштабной шкалы в относительном движении со смещенным центром развертки.
Выполнение измерений пеленга и дистанции. Все измерения должны выполняться на одной и той же шкале дальности, одним и тем же наблюдателем и одним и тем же приемом. Сначала рекомендуется измерять пеленг, затем сразу же расстояние. Направление измеряется механическим или электронным визиром с точностью 0,5°. Линия визира должна делить отметку цели пополам. При этом точность отсчета пеленга электронным визиром не зависит от смещения центра развертки во всех режимах. Расстояние измеряется совмещением подвижного круга дальности (ПКД) с эхо-сигналом таким образом, чтобы наружный край ПКД совпал с внутренним краем отметки. При измерении расстояния электронным визиром конец визира устанавливается примерно на 0,5 мм в ближнюю к центру экрана кромку эхо-сигнала. Измерение пеленгов и дистанций может быть выполнено с помощью системы автосопровождения, данные которой обычно точнее полученных вручную.
При обнаружении нескольких эхо-сигналов измерения рекомендуется выполнять в одной и той же последовательности через установленные интервалы времени и каждый цикл измерений относить к одному моменту времени, например, к моменту измерений данных первой цели.
Приближенное измерение расстояний может выполняться с помощью неподвижного круга дальности (НКД) и параллельных линий механического визира. Приближенное измерение направлений выпол-
Няется установкой па глаз одной из линий механического визира параллельно определяемому вектору со снятием отсчета по концу центральной линии с азимутальной шкалы.
Непрерывность наблюдения. Возможность отвлечения от экрана РЛС в условиях ограниченной видимости для выполнения других обязанностей (навигационные определения, радиотелефонные переговоры и т. д.) зависит от обстановки и в самых благоприятных условиях (достаточное водное пространство, отсутствие целей вблизи судна, малая вероятность появления мелких судов), как правило, не превышает 3—£ мин.
Суда с плохой отражающей способностью обнаруживаются на небольших расстояниях и, очевидно, даже кратковременные отвлечения от экрана РЛС могут привести к тому, что такие суда не будут своевременно обнаружены. В районах с интенсивным движением, а также при плавании вблизи берегов, где возможна встреча судов и объектов с малой отражающей способностью, с целью обеспечения непрерывного радиолокационного наблюдения, как правило, ходовая вахта усиливается и обязанности распределяются между двумя судоводителями.
Наличие теневых секторов, особенно впереди траверза, превращает даже непрерывное наблюдение в периодическое (в этих секторах) и требует регулярных отворотов для просмотра теневых секторов. Следует помнить, что причиной возникновения теневого сектора может быть находящееся поблизости крупнотоннажное судно (см. рис. 18.2).
Ограничения, свойственные радиолокационной информации. Следу* ет принимать во внимание, что даже самое современное радиолокационное оборудование не может полностью заменить визуальное наблюдение.
Основным ограничением при использовании РЛС является задержка информации, т. е. наличие значительного интервала времени (1—3 мин) между изменением ситуации вследствие маневра цели и обнаружением этого изменения оператором судовой РЛС. Кроме того, вследствие радиолокационных помех, волнения моря, метеорологических аномалий, малой отражающей поверхности некоторых судов и объектов отдельные цели могут быть вообще не обнаружены или не обнаружены своевременно.
В результате -выполнения радиолокационных наблюдений определяется только наличие цели и ее местоположение, что является неполной радиолокационной информацией. Для получения полной информации необходимо произвести ее обработку. Целью обработки информации является получение полных и точных данных о наличии ситуации столкновения или чрезмерного сближения и степени ее опасности, об элементах движения целей, определение необходимости маневра и его выполнение. Обработка радиолокационной информации начинается с момента обнаружения цели на экране РЛС и заканчивается после полного расхождения с ней.
Определение обстоятельств встречи и элементов движения целей
Критерии опасности. Если судно-наблюдатель или цель, или то и другое вместе будут двигаться, эхо-сигнал будет перемещаться на экране индикатора, оставляя за собой слабый светящийся след послесвечения — «хвоег». Перемещение эхо-сигнала на экране индикатора относительного движения является результатом взаимного перемещения двух объектов: судна-наблюдателя и цели. Линия перемещения эхо- сигнала называется линией относительного движения (ЛОД).
Обнаружив присутствие другого судна только с помощью РЛС, наблюдатель должен прежде всего определить, развивается ли ситуация чрезмерного сближения и (или) существует ли опасность столкновения. Если ЛОД проходит через начало развертки или вблизи него, то опасность столкновения существует. Критериями опасности столкновения судов являются основные обстоятельства встречи — расстояние кратчайшего сближения судов DKP и время от последнего момента наблюдений до момента кратчайшего сближения tKP. Ситуация чрезмерного сближения существует при DKP<D3ад. Чем меньше Ькр и р, тем больше степень опасности столкновения. В некоторых случаях определяются дополнительные обстоятельства встречи — дистанция пересечения курса £>ПеР, время до пересечения курса /пер, относительный курс /Со и относительная скорость V0.
Если существует опасность столкновения и (или) чрезмерного сближения, то необходимо своевременно предпринять надлежащие действия для расхождения на безопасном расстоянии. Для принятия правильного решения важно знать элементы движения других судов; т. е. их курсы и скорости.
Обстоятельства встречи и элементы движения судов опытным наблюдателем могут быть оценены ориентировочно по послесвечению, наблюдаемому на экране индикатора. Более точно обстоятельства встречи и элементы движения судов определяются графической прокладкой. Различают прокладку истинную и относительную.
Если на экране индикатора обнаружены эхо-сигналы нескольких судов, то на основании глазомерной оценки ситуации выбирают для прокладки опасные и потенциально опасные цели. Потенциально опасными называют цели, которые в данный момент не опасны, но могут стать опасными при предполагаемом маневре нашего судна или вероятном маневре цели.
Истинная прокладка. Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние Db пускают секундомер, замечают судовое время Тj, курс своего судна Кн и отсчет лага оль По пеленгу и расстоянию наносят местоположение эхо-сигнала А\ относительно своего местоположения, предварительно выбрав желаемый масштаб (рис. 19.1). Через определенный промежуток времени (для расчетов удобен интервал в
или 6 мин) наблюдения повторяют (П2, D2y Т2% ол2) и наносят местоположения своего судна 02 и наблюдаемого судна Л2. Проведя через точки A j и А2 прямую линию, получим линию истинного перемещения цели Кц.
По расстоянию между точками А\ и А2 и по времени Т\ и Т2 можно определить скорость цели Уц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна ГПер и Dnep.
Для определения расстояния кратчайшего сближения DKP и времени до него /Кр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями v42F=0i02. Отрезок О\С, проведенный перпендикулярно к линии, проходящей через точки А\ и F\ будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки 04 и А4) можно найти параллельным перемещением
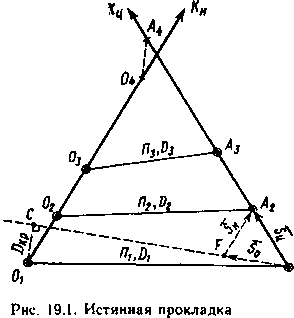
Рис.
19.2. Относительней прокладка
OfO*
*кр
— ■
VH
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (А Лг, Л3) на одной прямой и равенство расстояний А\А2~АъАъ свидетельствуют как об отсутствии промахов в наблюдениях, так п о неизменности элементов движения цели в период от Т, до Г3.
К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него.
Относительная прокладка. Эта прокладка получила широкое распространение, так как этим способом более быстро и легко находятся ответы на главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения. '
Из точки О, принимаемой за место своего судна, прокладывают наблюдаемые пеленги П1 и Пг и по ним расстояния D\ и D2 (рис. 19.2). Через полученные точки Ах и Л2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения ОкР. Время сближения на кратчайшее расстояние:
' ~ и Ткр =я 7Vb /кр-
Vo
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную до пересечения с ЛОД.) Время пересечения Г„ср определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке Л2 промежутка времени /ПеР:
А,П
tneр— и Тпер Т*2 fnep • у о
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. DKp и fKp, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух_перемещений — относительного 50(Р0) и судна-наблюдателя 5Н(РН): £ц = £о+8Н или Vц = ^о“Ь Рн- _ ^
Учитывая коммутативность суммы векторов (So+Sh = Sh+<>o), можно находить 5Ц (Гц) двумя способами.
Построение векторного треугольника (см. рис. 19.2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения.
Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию своего судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями.
Относительная прокладка выполняется на радиолокационном маневренном планшете, представляющем собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала. На практике для ускорения прокладки используют следующие приемы, исключающие необходимость использования логарифмической шкалы.
Независимо от интервала времени между наблюдениями векторный треугольник строят за промежуток времени б мин. В этом случае длина каждого вектора составляет */ю соответствующей скорости.
Экстраполированные позиции цели находят откладыванием по ЛОД расстояния между двумя известными ее позициями.
Сразу после получения первого положения цели в ее точку направляют вектор в масштабе 1:10. После получения второго положения цели находят экстраполяцией ее положение через 6 мин после первого наблюдения (если ЫФ6 мин) и из начала вектора Г„ в эту точку проводят вектор Рц.
*Кр и ^ер рассчитывают, откладывая по ЛОД отрезки, равные Vo. и деля глазомерно отрезок, включающий точку кратчайшего сближения или точку пересечения курса.
/
Рис.
19.3. Построения на маневренном планшете
по двум позициям цели, полученные с
интервалом 3 мин
Рис.
19.4. Влияние погрешностей в позиции цели
на радиолокационную прокладку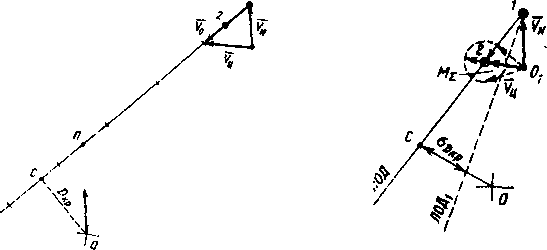
На рис. 19.3 показаны построения по двум позициям цели, полученным с интервалом 3 мин.
При проведении ЛОД через две точки цели возможны ошибки в оценке ситуации, связанные с промахом в нанесении одной из позиций или маневром цели в промежутке между наблюдениями. Для исключения этих ошибок следует по возможности .иметь для первоначальной оценки ситуации три позиции каждой цели.
Точность определения обстоятельств встречи и элементов движения судов. При обработке радиолокационных наблюдений следует иметь в виду, что обстоятельства встречи, курс и скорость цели определяются с погрешностями, которые в ряде случаев могут быть весьма значительными. Особенно важно учитывать вероятную погрешность в DKp при оценке опасности столкновения.
Проведенные исследования показали, что при работе на шкалах среднего масштаба (15—16 миль) вследствие погрешности измерения пеленгов и дистанций относительное положение цели находится со средней квадратической погрешностью М«0,6 кб. Если суммарную погрешность в двух относительных позициях цели отнести (точки / и 2 на рис. 19.4) ко второму моменту наблюдения, можно считать, что второе относительное положение определено с суммарной погрешностью М £ «0,85 кб.
Погрешность в определении позиции цели в первую очередь приводит к погрешности определения DKV (см. рис. 19.4):
![]()
(19.1)
Значения средней квадратической погрешности определения DKР в зависимости от и промежутка времени между наблюдениями Д/н приведены на графике (рис. 19.5).
С вероятностью р=0,95 предполагаемая дистанция расхождения судов лежит в пределах DKp=rt2ar кр. Погрешности в определении DКр весьма существенны и должны обязательно учитываться при оценке опасности сближения.
Как видно из рис. 19.4, вследствие погрешности в определении позиции цели возникают погрешности в определении tKР, /Сц и Уц.
Рис. 19.5. Средняя квадратическая Рис. 19.6. Средняя квадратическая по-
погрешность дистанции кратчайшего грешность определения курса цели
сближения £>кр /Си
Погрешность в определении tKр зависит от отношения *Кр/Д*н и относительной скорости цели. Для встречных целей ot «0,5ч-1,0 мин,
кр
при обгоне а*кр «2ч-3 мин.
Погрешность в определении курса цели зависит от ДtH и скорос ти цели. Чем меньше скорость цели, тем больше погрешность в определении ее курса (рис. 19.6). Погрешность в определении скорости цели также зависит от At„ (рис. 19.7). Следует иметь в виду, что фактические погрешности в определении /Сц и Уц будут больше вследствие погрешностей в курсе и скорости судна-наблюдателя.
Определение маневра наблюдаемого судна. Если судно-иаблюда- гель и наблюдаемое судно не изменяют своих элементов движения, то нанесенные на маневренный планшет через одинаковые промежутки времени относительные позиции наблюдаемого судна будут ложиться на одной прямой примерно в одинаковом расстоянии (с учетом возможных ошибок). На рис. 19.8, например, видно, что в промежутке между первым и третьим моментами наблюдений (точки А\% А2, Л3) наблюдаемое судно не изменяло своих элементов движения.
Если очередная нанесенная позиция наблюдаемого судна ложится в стороне от линии относительного курса (точки А4 и Л5), то при отсутствии промаха в измерениях это говорит об изменении курса и (или) скорости наблюдаемого судна.
Для определения маневра, сделанного наблюдаемым судном, можно сделать следующие построения (см. рис. 19.8):
Рис.
19 8. Определение маневра цели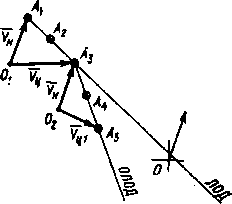
уз Г 3 —\
2
/
2 4 6 в 10 At, мин
Рис. 19.7. Средняя квадратическая погрешность определения скорости цели Уц
\Sn(3muh)
Рис
19.10. Классификация цели вблизи
курсовой черты
Рис.
19.9. Глазомерная оценка обстоятельств
встречи и элементов движения цели
 из
начала 7„ (точка 02)
проводим новый вектор движения (скорости
Рц)
наблюдаемого судна (в точку А$).
из
начала 7„ (точка 02)
проводим новый вектор движения (скорости
Рц)
наблюдаемого судна (в точку А$).
На рис. 19.8 вектор скорости судна-наблюдателя построен в масштабе 1 : 10 (т. е. вектор движения за б мин), интервал времени между третьим и пятым наблюдениями также 6 мин. В случае, приведенном на рис. 19.8, мы видим, что наблюдаемое судно отвернуло вправо и одновременно уменьшило скорость.
Глазомерная оценка обстоятельств встречи и элементов движения цели. Обязательным этапом обработки радиолокационной информации является глазомерная оценка ситуации на экране индикатора PJ1C. Такая оценка осуществляется после обнаружения эхо-сигнала. Она предшествует радиолокационной прокладке и не прекращается до полного расхождения. При большом количестве эхо-сигналов целей глазомерная оценка ситуации позволяет отобрать для радиолокационной прокладки опасные и потенциально опасные цели.
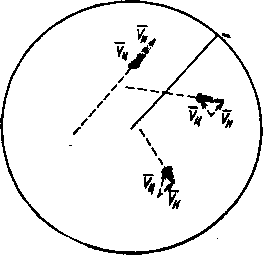
DKр и Z)nep определяются глазомерно мысленным построением Л ОД цели. Для этого необходимо продолжить за эхо-сигнал след послесвечения (рис. 19.9). На мелкомасштабной шкале, где плохо заметен след послесвечения, устанавливают на эхо-сигнале перекрестье визира и подвижного круга дальности. Спустя некоторое время, когда эхо-сигнал сойдет с перекрестья, мысленно проводят ЛОД цели через перекрестье и позицию эхо-сигнала.
Для оценки примерного направления движения цели (ее ракурса) необходимо иметь навыки мысленного построения треугольников скоростей у следа послесвечения цели. На рис. 19.9 все мысленные построения показаны пунктиром.
Если эхо-сигнал находится вблизи курсовой черты и след его послесвечения параллелен курсовой черте, цель легко может быть классифицирована (встречная, неподвижная или попутная) сравнением относительной скорости со скоростью судна-наблюдЬтеля. Для этого замеряют изменение расстояния до цели за 2 или 3 мин и, умножив иа 3 или 2 соответственно, получают относительное перемещение цели за 6 мин. Вычитая из полученного перемещение судна-наблюдателя за 6 мин, получают перемещение цели за 6 мин (со знаком «+»— встречное, со знаком «с—»— попутное).
В условиях мостика для классификации цели пользуются следующим приемом. Замерив расстояние до цели по курсу и запустив секундомер, смещают ПКД на расстояние, проходимое судном-наблюда-
гелем за 3 мин. Если через 3 мин эхо-сигнал окажется на ПКД — цель неподвижная, перейдет ПКД — встречная, не дойдет до ПКД — попутная (рис. 19.10).
Выбор и обоснование маневра
Если суда не находятся на виду друг у друга при плавании в районах ограниченной видимости или вблизи таких районов, то при выборе маневра руководствуются Правилами раздела I «Плавание судов при любых условиях видимости» (Правила 4—10) и Правилом раздела III «Плавание судов при ограниченной видимости» (Правило 19).
При выборе маневра необходимо учитывать то, что он не должен быть противоположным маневру, который обычно предпринимает судоводитель для расхождения с другими судами при входе в визуальный контакт. В противном случае внезапное улучшение видимости или сближение на расстояние визуального контакта может поставить судоводителя в трудное положение, поскольку как только суда, идущие в районе ограниченной видимости или вблизи него, окажутся на виду друг у друга, они должны выполнять правила раздела II.
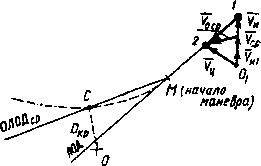
Прогнозирование последствий маневра судна-наблюдателя. Оценить последствия предполагаемого маневра своего судна можно, если по результатам наблюдений за целью имеется ее ЛОД и построен треугольник скоростей (рис. 19.11). В этом случае для определения предполагаемой дистанции расхождения после маневра судна-наблюдателя и при условии неизменности элементов движения цели необходимо выполнить следующие построения:
из начала вектора V» (точка Oj) построить новый вектор судна- наблюдателя Рщ;
провести новый вектор относительной скорости Ft,i из конца век тора P„i в конец вектора 7Ц;
на ЛОД найти позицию, цели в момент маневра судна-наблюдателя по предполагаемому времени начала маневра и относительной скорости V* (точка Af);
из точки М провести ожидаемую линию относительного движения (ОЛОД) параллельно вектору V0\;
г
Рис.
19.12. Прогнозирование последствий
маневра цели
Рис.
19.11. Прогнозирование последствий маневра
судна-наблюдателя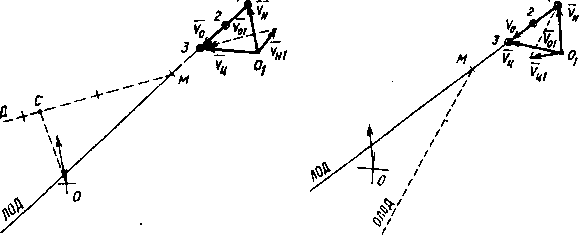
Рис.
19.13. Глазомерная оценка тенденции
разворота ЛОД
 время
от начала маневра до кратчайшего
сближения можно оценить, откладывая
по ОЛОД новую относительную скорость.
время
от начала маневра до кратчайшего
сближения можно оценить, откладывая
по ОЛОД новую относительную скорость.
Следует иметь в виду, что вследствие погрешностей в относительных позициях цели направление ОЛОД и ожидаемая дистанция расхождения получены с погрешностью, величина которой может быть определена по графику на рис. 19.5.
Прогнозирование последствий маневра цели. Для оценки последствий предполагаемого маневра цели необходимо из начала вектора Fu (точка Oi) построить новый вектор цели РЦ1 (рис. 19.12). Все последующие построения аналогичны построениям при прогнозировании последствий маневра судна-наблюдателя.
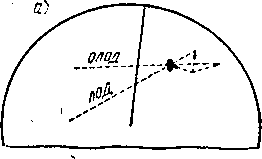
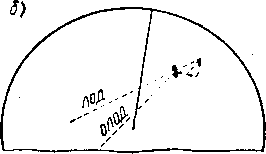
Глазомерная оценка тенденции разворота ЛОД. Навыки мысленного построения треугольников скоростей у следа послесвечения цели позволяют оценить направление разворота ЛОД вследствие предполагаемого маневра судна-наблюдателя и (или) цели. На рис. 19.13, а по казаны пунктиром мысленные построения при предполагаемом повороте своего судна вправо (в данном случае DKP увеличится). На рис.
показаны соответствующие построения при предполагаемом убавлении скорости цели (в этом случае DKP уменьшается).
Как правило, тенденция разворота ЛОД оценивается в первоначальный момент маневра, т. е. при малых изменениях элементов движения судов.
Например, в ситуации на рис. 19.13, б при дальнейшем уменьшении скорости цели ЛОД перейдет через центр, и Дф после этого начнет увеличиваться. Несмотря на это, следует считать, что сбавление хода целью в данном случае может ухудшить ситуацию сближения, т. о. ЛОД имеет тенденцию разворота к центру экрана.
Выбор и обоснование маневра для расхождения в заданной дистанции. Если ДфСДзад, то необходимо предпринять маневр для расхождения с целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию ^ выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя £кр, Vo И Озад, выбирает время начала маневра.
Выбираемый маневр в соответствии с требованиями Правила 8 должен приводить к расхождению на безопасном расстоянии и, если позволяют обстоятельства, быть уверенным, своевременным и соответствовать хорошей морской практике. Изменение курса или скорости должно быть достаточно большим, чтобы легко обнаруживаться другими судами. «Если имеется достаточное водное пространство, то изменение только курса может быть наиболее эффективным действием
для предупреждения чрезмерного сближения при условии, что изменение сделано заблаговременно, является существенным и не вызывает чрезмерного сближения с другими судами», Правило 8(c). Еще два условия выбора маневра диктуются Правилом 19(d), (i), (ii): «...насколько это возможно, следует избегать изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым; изменения курса в сторону судна, находящегося на траверзе или позади траверза».
Цель ограничений, накладываемых МППСС-72 на сторону изменения курса, состоит в том, чтобы по возможности избежать несогласованных, компенсирующих друг друга маневров расходящихся судов. В конечном итоге именно эго является непосредственной причиной многих столкновений судов. Граница «на траверзе» и «впереди траверза» в Правилах четко не определена, однако в большинстве комментариев отмечается, что положение «на траверзе» включает в себя по два румба в обе стороны от курсового угла 90°. Поэтому при расхождении с целью на курсовом угле 67,5—90° правого борта (одна из пограничных ситуаций) изменение курса влево не будет нарушением Правила 19 (d). При расхождении с целью, приближающейся с кормы на 9= 180°±22,5° (вторая пограничная ситуация), сторона изменения курса Правилами не определена, однако большинство специалистов в этом случае рекомендуют изменение курса влево.
Ограничения, накладываемые Правилом 19 (d) на сторону изменения курса, достаточно строгие. Поэтому, как правило, при расхождении с целью впереди траверза вначале проверяется возможность изменения курса вправо, затем уменьшения скорости и только при невозможности разойтись этими маневрами вследствие навигационных ограничений или других судов может быть принято решение изменить курс влево. В этом случае маневр должен быть выполнен существенно раньше и быть более решительным, чем в случае изменения курса вправо.
Последующая графическая прокладка служит для проверки безопасности выбранного* маневра и уточнения его величины.
Графическая прокладка для обоснования маневра расхождения в заданной дистанции показана на рис. 19.14. Она осуществляется в следующей последовательности:

на ЛОД по предполагаемому времени маневра или по предполагаемой дистанции маневра наносится точка М местоположения цели в момент начала маневра расхождения;
мысленным разворотом вектора VH или изменением его длины в соответствии с выбранным видом маневра определяют сторону разворота ЛОД при этом маневре;
из точки М проводят по касательной к Озгл ОЛОД; при этом из двух возможных касательных к Z)3aд проводится та, которая соответствует стороне разворота ЛОД при выбранном виде маневра;
через конец вектора Гц параллельно ОЛОД в направлении, противоположном направлению ОЛОД, проводится линия вектора новой относительной скорости;
если выбран маневр изменением курса, то новое направление вектора скорости судна-наблюдателя VH\ находят разворотом вектора Гн вокруг точки Oi до пересечения с линией вектора новой относительной скорости; угол между векторами VH\ и Vн определит требуемый угол отворота;
если выбран маневр скоростью, то новый вектор скорости судна- наблюдателя равен отрезку вектора от точки 0{ до линии новой относительной скорости;
если выбран комбинированный маневр курсом и скоростью, то для нахождения нового курса судна-наблюдателя вокруг точки Oi разворачивается уменьшенный в соответствии с предполагаемым сбавлени- ем скорости вектор судна-наблюдателя.
Возвращение к прежним элементам движения. С выбором и осуществлением маневра процесс расхождения не заканчивается. Судоводитель должен тщательно контролировать эффективность предпринятого маневра. Если последующая радиолокационная прокладка показала, что Окр<£>заД, следует исходя из обстоятельств данного случая предпринять дополнительный маневр, а если необходимо предотвратить столкновения или иметь больше времени для оценки ситуации, то в соответствии с Правилом 8(e)—уменьшить ход или остановиться, застопорив машины или дав задний ход.
Если последующая радиолокационная прокладка показала, что в результате предпринятого маневра судна-наблюдателя (или маневра судна-наблюдателя и маневра цели) DKp^D3aay судоводитель должен оценить возможность возвращения своего судна к прежним элементам движения. Для этого рекомендуется провести касательную к заданной дистанции расхождения, параллельную ЛОД до предпринятого маневра (на рис. 19.14 эта линия показана пунктиром).
После пересечения целью этой линии судно-наблюдатель может вернуться к прежним элементам движения, не сближаясь при этом с целью ближе £>эад.
После возвращения к прежним элементам движения радиолокационную прокладку ведут до тех пор, пока другое* судно не будет окончательно пройдено и оставлено позади.
Учет навигационных ограничений. При плавании в узкости маневр, который выбирают и обосновывают для расхождения, должен одновременно и в равной степени обеспечивать и навигационную безопасность судна-наблюдателя. С этой целью при обосновании маневра следует:
исходя из навигационной обстановки знать безопасную дистанцию отхода от линии пути судна Sfie.w,
опустив перпендикуляр из конца вектора Гщ на вектор Гп, определить скорость отхода от линии пути УОТх, т. е. расстояние, иа которое смещается свое судно в сторону от линии пути каждые 6 мин в процессе расхождения с целью (см. рис. 19.14);
определить время расхождения по V0\ и расстоянию АШ; определить дистанцию отхода Soтх = Уотх^рас*;
если 50тх>5безоп, то предполагаемый маневр опасен в навигационном отношении и следует выбрать маневр с меньшей скоростью отхода (например, комбинированный маневр).
Учет маневра цели. Выбирая маневр по расхождению с другим судном, конечно, никогда нельзя быть уверенным, что это судно само не предпримет какого-либо маневра, а будет следовать постонным курсом и постоянной скоростью. Поэтому, выбрав маневр в предположении постоянства элементов движения цели, после его выполнения необходимо тщательно наблюдать за эхо-сигналом этого судна до тех пор, пока суда не разойдутся.
Неблагоприятный маневр цели приводит к уменьшению расстояния кратчайшиего сближения, а в некоторых случаях может свести на нет предпринятые нами действия. Поэтому судоводитель должен уметь при решении задачи учитывать влияние маневра другого судна на изменение обстоятельства встречи.
Если в процессе расхождения могут быть сделаны предположения о возможном маневре цели, то этот предполагаемый маневр может быть учтен при выборе маневра судна-наблюдателя. В этом слу* чае новый векторный треугольник скоростей строится у измененного вектора скорости цели Ущ.
Рис.
19.15.
Влияние потенциально
опасного судна на выбор маневра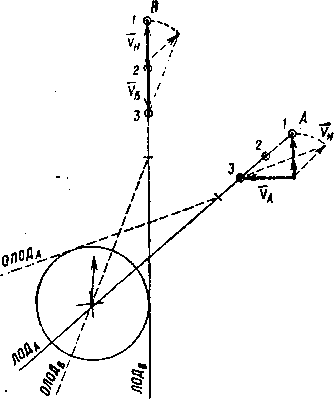
При достаточном навыке дополнительные графические построения в тре-
Рис.
19.16. Анализ ситуации при расхождении с
несколькими судами:
а
—потенциально
опасное судно А
не
повлияло на вид и величину маневра:
б
— потенциально опасное
судно А
повлияло на величину маневра

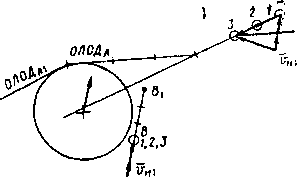
угольнике скоростей судна В не производятся, а тенденция изменения относительного курса оценивается на глаз. Такая оценка позволяет из большего количества целей выбрать те суда, которые могут быть опасны при выборе маневра. В ситуации на рис. 19.16, а нетрудно убедиться, что маневром для расхождения с судном D является отворот вправо. Дистанция расхождения с судами В и С увеличится, а дистанция расхождения с судном А уменьшится. В этом случае необходимо решать задачу расхождения с судами А и D. Проведя ОЛОД судна D по касательной к Д»ад. переносим ее в конец вектора VD и засечкой своей скоростью находим угол отворота вправо а. Развернув на такой же угол вектор своей скорости в треугольнике скоростей судна А и проведя ОЛОДд параллельно Роь убеждаемся, что с судном А расходимся безопасно. При малом расстоянии между ЛОД судов А и D в подобной же ситуации решается задача по расхождению с одним судном (судном А) левыми бортами (рис. 19.16,6).
Потенциально опасное судно может повлиять не только на величину, но и на вид маневра. В ситуации на рис. 19 17, если бы не было судна-сателлита В, наиболее вероятным маневром расхождении с опасным судном С было бы изменение курса вправо. Однако потенциально опасное судно В становится опасным при повороте судна-наблюдателя вправо. В этих условиях выбран маневр расхождения уменьшением скорости. В процессе расхождения судно В перейдет в по-
Рис.
19.17. Потенциально опасное судно В
повлияло на вид маневра
т
Рис. 19.18. Потенциально опасное судно Рис. 19.19. Временное приведение потен- В повлияло на время маневра циально опасного судна на опасную
ЛОД
ложение Вх и после возвращения судна-наблюдателя к прежнему движению судно В вновь станет сателлитом, но уже впереди траверза.
В ситуации на рис. 19.18 потенциально опасное судно В повлияло на время маневра. Если бы его не было, маневр расхождения с опасным судном А был бы предпринят существенно раньше. Анализ ситуации показал, что целесообразно вначале разойтись с потенциально опасным судном В, а затем по корме у него изменить курс вправо для расхождения с опасным судном.
В ситуации на рис. 19.19 потенциально опасное судно В не повлияло на вид, величину и время маневра. Однако для расхождения с опасным судном А выбран маневр, временно приводящий судно В на опасную ЛОД. Анализ ситуации показывает, что за время расхождения с судном А судно В вследствие малой относительной скорости не успеет войти в опасную зону. После возвращения судна-наблюдателя на прежний курс ОЛОДв! пройдет безопасно.
При обосновании маневра расхождения с несколькими судами необходимо, как правило, наносить на планшет полный анализ ситуации, т. е. не только ОЛОД судов после маневра, но ОЛОД| после возвращения к прежним элементам движения (см. рис. 19.17—19.19). В некоторых случаях, когда осуществляется последовательное расхождение с несколькими целями, возможны промежуточные ОЛОД.
При расхождении с судами рекомендуется следующая последовательность действий.
Нанести первые позиции судов и построить векторы скорости судна-наблюдателя в масштабе 1 : 10 (векторы движения за 6 мин).
Навести вторые (если позволяет обстановка, то и третьи) позиции судов (удобнее через интервалы времени, кратные 3 мин); нанести экстраполированные (или интерполированные) точки на 6 мин; построить векторы целей.
Проанализировать ситуацию сближения, выбрать вид маневра (поворот вправо, влево, изменение скорости), а также суда, наиболее опасные при данном маневре.
Уточнить маневр (на сколько градусов поворачивать, какой дать ход); построить новые векторные треугольники и ожидаемые линии относительного движения.
Выполнить маневр.
Проконтролировать эффективность маневра.
Учет инерции судна
Учет циркуляции. В соответствии с НШС элементы поворотливости представлены в таблице маневренных элементов в виде графика и таблицы при циркуляции с полного переднего хода на правый и левый борт в грузу и в балласте с положением руля «на борт» (р= =35°) и «на полборта» (р= 15ч-20°). Следует, однако, иметь в виду, что параметры фактической циркуляции судна могут существенно отличаться от табличных в зависимости от скорости судна, его посадки (крена и дифферента), соотношения осадки и глубины, направления, силы ветра и волнения.
При изменении курса судном-паблюдателем (рис. 19.20) относительное местоположение цели будет перемещаться по криволинейной траектории ог точки М\ на ЛОД (в момент начала маневра судна-наблюдателя) до точки F на ОЛОД (в момент окончания маневра). В дальнейшем цель перемещается по ОЛОД, смещенной на расстояние ДОц. Реальное относительное перемещение цели будет, конечно, сложнее. Вследствие падения скорости судна-наблюдателя на циркуляции ОЛОД не будет параллельна вектору V0\ до тех пор, пока наше судно вновь не наберет на прямом курсе первоначальную скорость хода. В данном случае падение скорости на циркуляции частично компенсирует ADц. Во многих случаях, например, при расхождении со встречной целью вследствии падения скорости судна-наблюдагеля на повороте АОц значительно увеличивается. Учет циркуляции возможен следующими способами (см. рис. 19.20).
Способ относительного промежуточного курса. Из графической прокладки находят требуемый угол изменения курса. Из таблицы ма* невренных элементов по углу отворота находят время, затрачиваемое судном на поворот /ман, угол промежуточного курса и промежуточ-
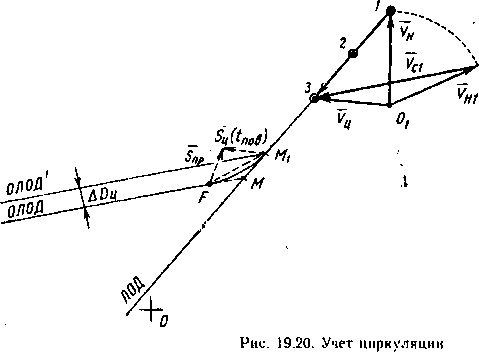
ное плавание 5„р. Из точки Mi позиции цели в момент начала поворота откладывают Su за время поворота. Из конца вектора в сторону, обратную промежуточному курсу, откладывают промежуточное плавание 5ПР. Через начало вектора 5Пр проводится ОЛОД параллельно Г01.
Способ точен, но трудоемок. При решении задач расхождения на мостике судна не применяется.
Применяется при разборе аварий и в качестве эталонного при оценке точности приближенных способов.
Способ условной упрежденной точки. ОЛОД проводится не из точки М\ местоположения судна-цели в момент начала маневра, а из условной упрежденной точки М, отнесенной по ЛОД вперед на время упреждения /упр. В первом приближении в качестве tуи» принимают половину времени поворота. Таким образом, при этом способе учета циркуляции поворот судна-наблюдателя начинается на {упр«0,5/Маи раньше, чем цель придет в точку, из которой проведена ОЛОД.
Способ наиболее часто применяется на практике, более точен для встречных целей и менее точен для целей, идущих сходящимися курсами. Неприменим при Повороте под корму судна-сателлита, так как в этом случае Уо=0 и при любом *у1ф точки М и совпадают.
Способ введения поправки в Ьзал. Как показывают расчеты, при изменении* курса судна-наблюдателя на угол до 90° погрешности в DKp вследствие инерционности поворота не превышают тактического радиуса циркуляции, при больших углах поворота достигают диаметра циркуляции. В этом способе /)3.,л назначается с запасом на максимально возможную погрешность от неучета циркуляции. Этот способ является основным при повороте под корму потенциально опасного судна, идущего параллельным или почти параллельным курсом.
Учет инерции при маневре скоростью. Инерционные характеристики судна в соответствии с НШС представляются в виде графиков, построенных в постоянном масштабе расстояний и имеющих шкалу значений времени и скорости.
При изменении скорости судиом-наблюдателем относительное местоположение цели будет перемещаться по криволинейной траектории, кривизна которой постепенно уменьшается по мере выхода своего судна на новую установившуюся скорость. Погрешности от неучета инерции при маневре скоростью могут достигать нескольких миль — отсюда важность учета инерции. При маневре скоростью на крупно- тоннажном судне новая скорость судна-наблюдателя устанавливается через десятки минут, и все это время цель перемещается по кривой ЛОД — отсюда сложность учета инерции.
Учет инерции возможен следующими способами.
Способ построения кривой ОЛОД. Относительная траектория перемещения судна может быть найдена построением путевых треугольников за последовательные интервалы времени t„ после маневра S„(fi)=Su(/i)— SH(ti).
Для построения кривой ОЛОД (рис. 19.21) необходимо:
из точки М местоположения цели в момент начала маневра на шего судна провести линию курса цели и отметить на ней отрезки, проходимые целью через определенные интервалы времени, например через каждые 3 мин (точки В{, #2, • , Вп)\ из точек В, провести линии в сторону, обратную курсу судна-наблюдателя, и отложить по ним отрезки, пройденные судном-наблюда гелем за соответствующее время после маневра (точки С,, С2, Сп)\ через точки С, провести кривую
г
Рис
19/21. Учет инерции построением кривой
ОЛОД
Рис.
19.22. Учет инерции способом условной
упрежденной точки
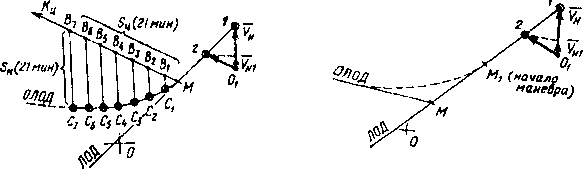
ЛОД и определить Окр как кратчайшее расстояние от центра планшета до кривой.
Способ точный и наглядный, но трудоемкий. Этим способом можно решить только задачи предсказания DKP по выбранному маневру, но не решается задача по нахождению требуемого изменения скорости для расхождения в заданной дистанции. Для решения задач в условиях мостика этот способ не применяют. Он используется при разборе аварий, а также в качестве эталонного для оценки точности приближенных способов учета инерции.
Способ введения поправки в Д..Д. Если в качестве меры инерционности судна принять характеристику tVt то максимальная ошибка от неучета инерции не превысит AD„^0,3VVi.' (Д£>и, кб; V„, уз; /г, мин). Для судов с V„^10 уз и /0^1 мин Д/)„ не превышает 3 кб. В этом случае йЗЛА может назначаться с запасом на максимально возможную ошибку. Этот способ может быть основным для судов водоизмещением до 1000 т.
Способ условной упрежденной точки (рис. 19.22). При этом способе учета инерции в треугольнике скоростей откладывается новая установившаяся скорость судна-наблюдателя, но ОЛОД проводится не из точки М\ местоположения цели в момент начала маневра, а из условной упрежденной точки М, отнесенной от точки М\ по ЛОД вперед на время упреждения /уПр. В первом приближении в качестве tynv принимают половину времени, за которое устанавливается новая скорость своего судна. Таким образом, при этом способе учета инерции команда на сбавление хода дается на /Уир~0,5/Ман раньше, чем судно- цель придет в точку, из которой проведен ОЛОД. При правильном выборе времени упреждения ОЛОД пройдет по касательной к фактической траектории эхо-сигнала.
При этом способе учета инерции условно считается, что в течение /уПр сохраняется прежняя скорость судна-наблюдателя, VH (при этом завышается пройденный путь), а после мгновенно устанавливается новая скорость V»\ (при этом пройденный путь занижаете^). Как видно из рис. 19.23, оптимальным будет такое время упреждения, при котором завышение пройденного пути за время /у„р компенсируется последующим занижением. Это соответствует равенству заштрихованных^ площадей на рис. 19.23.
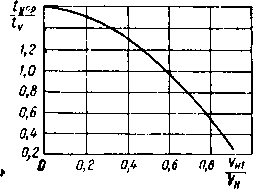
На рис. 19.24 приведена информация по выбору оптимального времени упреждения в зависимости от выбранного маневра (Vm/V* — = 0—Стоп, Vmi/V'm-= 0,5 — МПХ и т. д.) и характеристики инерционности /,. На основании этой информации в начале рейса может быть составлена рабочая таблица времени упреждения.
Рис.
19.24. Оптимальное время упреждения
в зависимости от маневра и характеристики
инерционности
Учитываемое
иэккнение 'скорости
Фактическое
изменение скорости
Рис.
19.23. Принцип выбора времени упреждения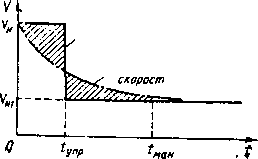 Пример
1. Судно имеет инерционную характеристику
= 4 мин и имеет следующую градацию
скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз,
СМПХ-5 уз. Составить рабочую таблицу
времени упреждения.
Пример
1. Судно имеет инерционную характеристику
= 4 мин и имеет следующую градацию
скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз,
СМПХ-5 уз. Составить рабочую таблицу
времени упреждения.
Решение. ППХ-СПХ. Ущ/Ун — Ю: 14=*0,71. Из графика на рис. 19.24 fynp/f»*** = 0,8; ^упр — О^*4*3,2л?3 мин. Рассчитав аналогично для VWУн**0,57; 0,3; 0 получим время упреждения (мин) для маневров сбавления скорости с полного хода
Маневр
СПХ
МПХ
СМПХ,
Стоп
/упр, МИН
Способ условной упрежденной точки рекомендуется в качестве основного для судов водоизмещения до 25—30 тыс. т.
Способ средней скорости. При этом способе учета инерции в треугольнике скоростей откладывается не новая скорость судна-наблюдателя, а некоторая средняя (эквивалентная) скорость за время от нача-
^н('кр)
ла маневра до момента кратчайшего сближения VCp— —;— . Через
*кр
концы векторов VCp и Vц проводится вектор средней относительной скорости и параллельно ему из точки М проводится ОЛОДср (рис. 19.25). Фактически эхо-сигнал будет перемещаться по кривой линии, расположенной между ЛОД и ОЛОДср выпуклостью в сторону ЛОД, и в точке кратчайшего сближения пересечений ОЛОДср.
В первом приближении в качестве средней скорости может быть принята средняя арифметическая между прежней и новой скоростью Vcp~0,5(Va-\-Vm). (19.2)
При малом времени до кратчайшего сближения (tKf)^2,btv) ошибка не превышает 10 % выбега судна при свободном торможении.
 Более
точно величина средней скорости может
быть найдена из универсальной таблицы
учета инерции (табл. 19.1). Использование
универсальной таблицы учета инерции
рассмотрим на примерах.
Более
точно величина средней скорости может
быть найдена из универсальной таблицы
учета инерции (табл. 19.1). Использование
универсальной таблицы учета инерции
рассмотрим на примерах.
Рис. 19.25. Учет инерции способом средней скорости
|
Время от начала маневра до кратчайшего сближения при инерционных характеристиках t0, мин |
Средняя скорость в до* лях от начальной ^Cp/VH при маневрах Ун1/Ун | |||||||||||
|
4 |
5 |
6 |
7 1 |
8 |
9 |
10 |
12 | |
1 и |
0,75 |
0,5 | |
| 0,25 |
0 |
|
|
|
|
|
|
|
6 |
7 |
8 |
0,9 |
0,9 |
0,8 |
0,8 |
|
|
— |
6 |
7 |
8 |
9 |
10 |
12 |
14 |
0,9 |
0,8 |
0,7 |
0,7 |
|
6 |
8 |
10 |
И |
13 |
14 |
16 |
19 |
22 |
0,85 |
0,75 |
0,65 |
0,6 |
|
10 |
12 |
14 |
17 |
19 |
22 |
24 |
29 |
33 |
0,8 |
0,7 |
0,6 |
0,5 |
|
14 |
18 |
22 |
25 |
29 |
32 |
36 |
43 |
— |
0,8 |
0,65 |
0,5 |
0,4 |
|
22 |
28 |
34 |
39 |
— |
— |
— |
|
— |
0,8 |
0,6 |
0,4 |
0,3 |
|
38 |
48 |
|
|
|
|
|
|
|
0,8 |
0,6 |
0,4 |
0,2 |
Примечания: IVU — скорость судиа-наблюдателя до маневра; У щ—скорость судна-наблюдателя после маневра; VCp— средняя (эквивалентная) скорость от начала маневра до момента кратчайшего сближения; tv — инерционная характеристика судна, численно равная времени падения скорости до величины 0,5 И* при маневре на «Стоп» (зависит от водоизмещения судна, начальной скорости и внешних условий).
Пример 2. Найти среднюю скорость судна за время от начала маневра ППХ — МПХ (Vhi=0,5Vh) До кратчайшего сближения, если /Мр&г20мин; /d«4mhh, а УПпхв
16 уз.
Решение. В табл. 19.1 в колонке tv=4 находим ближайшее к заданному /кр=»22 мин и в соответствующей строке для маневра 0,5 цолучаем УСр/Ун*=0,6. Среднюю скорость можно отложить в треугольнике скоростей глазомерным выделением 0,6 отрезка Уи или при необходимости перевести в узлы УСр = 0,6-16=9,6 уз.
Пример 3. По результатам радиолокационной прокладки получили, что для расхождения с целью в А|«д необходимо иметь УСр«0,5Уи. По ОЛОДср и V0 Ср определили время от начала маневра до кратчайшего сближения /Кр»20 мин. Инерционная характеристика судна 8 мин. Какой маневр скоростью необходимо предпринять для расхождения на £>3ад?
Решение. В табл. 19.1 в колонке /« = 8 находим ближайшее к заданному /Кр=*19 мин и в соответствующей строке ищем ближайшее меньшее значение Уср. В данном случае. УСр*=0,5кл находит в колонке «0». Для расхождения с целью в Ьэад необходимо, дать «Стоп». При маневре на «Стоп» есть возможность оценить фактическую скорость Vt судна к моменту расхождения, так как (Уср/Ун)2.
В нашем случае VtJVa**0,5*«0,25, т. е. фактически к моменту расхождения скорость судна будет 0,25VB.
Использование индикатора истинного движения и приставок к РЛС
Оптический (зеркальный) планшет представляет собой антипарал- лаксное устройство, устанавливаемое над экраном индикатора РЛС и позволяющее вести прокладку без отрыва от радиолокационного наблюдения. Зеркальный планшет позволяет вести прокладку большого количества целей с меньшим интервалом времени ме^сду точками. Недостатками зеркального планшета являются необходимость начинать прокладку заново при переключении шкалы и несколько меньшая точность построений. Решение всех задач на зеркальном планшете совершенно аналогично прокладке на радиолокационном планшете. Для построения вектора VH полезно иметь прозрачную линейку с нанесенными длинами векторов для нескольких шкал.
Режим истинного движения позволяет наглядно представить фактическое перемещение целей, что дает возможность в узкостях соотносить это перемещение с навигационной обстановкой и прогнозировать дальнейшее движение целей. Еще одним достоинством истинного
Рис.
19.20. Влияние маневра цели на угол
разворота ЛОД
Рис.
19.28. Использование приставки «Альфа»
(«Ольха»)
Рис.
19.27. Анализ ситуации расхождения с
одной целью на индикаторе истинного
движения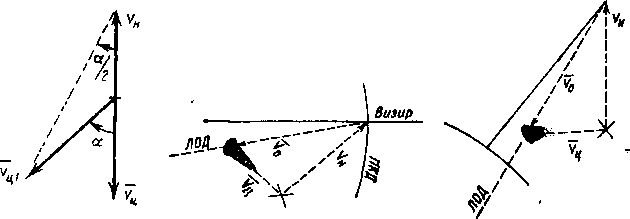
В режиме истинного движения имеется возможность получить полную информацию по расхождению с одной целью без ведения прокладки на маневренном планшете. Для этого, отметив позицию цели на зеркальном планшете, выставляют на цель перекрестье визира и ПКД и в дальнейшем положение визира и ПКД не меняют. Спустя некоторое время перекрестье сместится вместе с началом развертки в направлении курса судна-наблюдателя, а эхо-сигнал сместится в направлении курса цели. Эти перемещения пропорциональны скоростям судов, поэтому в любой момент времени перекрестье и эхо-сигнал совпадают с вершинами треугольника скоростей, а линия, проведенная через эти точки, показывает относительное движение цели. На рис. 19.27 пунктиром показаны линии, достраиваемые мысленно на экране для получения полной информации. Косым крестиком отмечена первоначальная позиция эхо-сигнала в момент наведения на него перекрестья. Используя этот способ, следует внимательно следить за неизменностью элементов движения цели и в случае маневра цели вновь навести на нее перекрестье визира и ПКД (или конец визира изменяемой длины).
Приставка «Альфа» («Ольха») позволяет с помощью специальных маркеров зафиксировать относительные позиции пяти целей. Наибольший эффект применение приставки дает в сочетании с режимом истинного движения и зеркальным планшетом. В этом случае внешний конец каждого маркера выполняет ту же роль, что и перекрестье визира и ПКД в предыдущем случае. На рис. 19.28 пунктиром показаны линии, достраиваемые мысленно для одной из пяти целей. Поперечная перекладина маркера позволяет оценить дистанцию кратчайшего сблн-
жения — ЛОД, касательная к ней, проходит *в двух милях. В данном случае (см. рис. 19.28) кратчайшая дистанция составляет I милю (справа), цель пройдет по корме судна-наблюдателя.
Современные зарубежные РЛС дают возможность вести полуавтоматическую прокладку до 10 целей непосредственно на экране черно- белого или цветного дисплея. Позиции целей вводятся вручную, фиксация времени и прокладка по этим данным осуществляется автоматически.
Особенности использования РЛС при плавании в системах разделения движения
Ориентация в потоке. При плавании в системе разделения движе- ния судов наличие большого количества целей создает необходимость глазомерной ориентации по экрану РЛС, а упорядоченность движения судов облегчает эту ориентацию. Следует использовать достаточно крупномасштабную шкалу, чтобы были заметны следы послесвечения. Удобно использовать сдвиг начала развертки с тем, чтобы на крупномасштабной шкале увеличить дистанцию обзора по носу судна-наблюдателя. Навыки в построении треугольников скоростей у следов послесвечения позволяют классифицировать все цели: суда нашего потока, суда встречного потока, пересекающие поток справа и слева, входящие в наш поток и выходящие из него, входящие во встречный поток и выходящие из него. Оценивая положение центра развертки относительно целей своего потока, следует убедиться, что наше судно не самое левое в своем поюке, т. е. оно не находится в районе линии или зоны разделении движения. Наличие следов послесвечения у целей своего потока говорит о том, что скорость судна-наблюдателя не равна скорости судов в полосе движения и, если есть возможность, следует привести ее в соответствие со средней скоростью потока.
I
Рис.
19.29. Выбор времени маневра для пересечения
встречного потока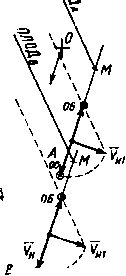 Пересечение
потока. Следует, насколько это возможно,
избегать пересечения потока судов.
Если же судно вынуждено это делать, то
безопасность пересечения потока должна
быть обоснована. Особенностью решения
задачи расхождения судов в этом случае
является заданиость курса — перпендикулярно
направлению движения потока.
Пересечение
потока. Следует, насколько это возможно,
избегать пересечения потока судов.
Если же судно вынуждено это делать, то
безопасность пересечения потока должна
быть обоснована. Особенностью решения
задачи расхождения судов в этом случае
является заданиость курса — перпендикулярно
направлению движения потока.
Если курс судна-наблюдателя уже перпендикулярен направлению потока, то при наличии опасности столкновения с одним из судов потока судно-наблюда- тель сбавляет ход. Особенность решения задачи заключается в необходимости своевременного увеличения скорости для расхождения в достаточном расстоянии по носу у следующего судна потока. В зависимости от расстояний между судами потока может возникнуть необходимость остановиться, пропустить несколько судов и только затем давать ход.
Если курс судна-наблюдателя не перпендикулярен направлению движения потока, то ведут радиолокационную прокладку целей, между которыми предполагают пересечь поток. Вектор VH в треугольниках скоростей этих целей разворачивают перпендикулярно направлению движения потока и проводят ОЛОД целей для случая не медленного маневра. Затем параллельным смещением ОЛОД находят время манев
ра, при котором ОЛОД проходят безопасно. Особенность решения задачи заключается в том, что в отличие от обычного расхождения выбирают не маневр, а по известному маневру (курс пересечения полосы движения определен Правилами 10) находят безопасное время его выполнения. На рис. 19.29 показаны построения для случая пересечения встречной полосы движения. Пунктиром проведены ОЛОД в случае немедленного маневра, при котором возникает опасность столкновения с судном А. Маневр может быть выполнен безопасно через 3 мин, когда цели сместятся в положение М.
Выбор дистанции расхождения и безопасной скорости
При решении задач расхождения судов на оценку наличия опасности чрезмерного сближения и на выбор маневра большое влияние оказывает принятая величина безопасной дистанции расхождения £зад. Одна из первых попыток обосновать D3aд была предпринята в 1964 г. проф. М. М. Лесковым, который представил зону чрезмерного сближения в виде окружности с центром в центре судна и с радиусом £зад=25т+а, где ST — тормозной путь судна, а — запас дистанции на время запаздывания радиолокационной информации. В разное время оригинальные попытки обосновать дистанцию расхождения предпринимали В. Хельмерс, А. Коккрофт и Д. Ламейер, X. Хильгерт. В 1975 г. были опубликованы результаты статистической обработки расхождения судов Е. Гудвин, которые показали, что в общем случае, статистическая зона расхождения несимметрична как относительно линии траверза, так и относительно ДП судна.
Попытки дать строгую количественную оценку понятиям «чрезмерное сближение» и «безопасная скорость» предпринимались на конференциях ИМО, однако они закончились безрезультатно. По всей вероятности эти понятия и не могут быть определены однозначно, так как они зависят от очень многих факторов. В то же время ориентировочная количественная оценка этих понятий, несомненно, полезна судоводителям.
Результаты статистического моделирования и экспериментов, проведенных на радиолокационном тренажере ЛВИМУ, показали, что заданная дистанция расхождения может быть рассчитана теоретически и аппроксимирована окружностью, смещенной вперед и вправо по направлению движения судна. Эту дистанцию следует назначать с таким расчетом, чтобы в случае неблагоприятного маневра, предпринятого целью в момент прохождения ею DKV, успеть этот маневр обнаружить и предпринять дополнительный маневр для избежания столкновения.
Назначаемая безопасная дистанция расхождения по данным РЛС Dзад (опасная зона) должна включать в себя по крайней мере четыре составляющих:
расстояние, достаточное для выполнения дополнительного маневра или остановки движения в случае неблагоприятного маневра цели, проходящей в Dзад;
расстояние, гарантирующее обнаружение неблагоприятного маневра цели;
расстояние, учитывающее возможные погрешности в определении DKP;
расстояние, учитывающее отстояние антенны РЛС от наиболее удаленной оконечности судна.
Рис. 19.30. Безопасная дистанция расхождения: а — возможен маневр курсом для компенсации неблагоприятного маневра цели; б — маневр изменением курса невозможен или существенно ограничен
 Расстояние,
достаточное для дополнительного маневра,
зависит от относительной скорости
сближения, предпринимаемого маневра,
инерционно-тормозных и маневренных
качеств судна-наблюдателя.
Расстояние,
достаточное для дополнительного маневра,
зависит от относительной скорости
сближения, предпринимаемого маневра,
инерционно-тормозных и маневренных
качеств судна-наблюдателя.
Расстояние, гарантирующее обнаружение неблагоприятного маневра цели, зависит от относительной скорости сближения и времени запаздывания информации Д/Инф. Это время определяется типом используемого радиолокационного оборудования, шкалой, интервалом времени между наблюдениями, наличием следов послесвечения на экране РЛС и квалификацией наблюдателя. У квалифицированного наблюдателя Д/Инф<3 мин.
Возможные погрешности в определении DKP зависят от типа установленного радиолокационного оборудования, используемой шкалы, режима стабилизации изображения, интервала времени между наблюдателями, времени до кратчайшего сближения и квалификации наблюдателя. яти погрешности при ручной прокладке больше, чем при использовании САРП. Погрешности уменьшаются при использовании РЛС с большим диаметром экрана, при переходе на крупномасштабные шкалы, стабилизации изображения по гирокомпасу (норд или курс стабилизированный). В приводимых ниже примерах принято, что при подходе цели к Озад РЛС будет переключена на шкалу 8 миль и Д/)Кр«0,4 мили.
При расхождении по данным РЛС судоводитель должен понимать, что все расстояния, включая DKP, определяются от антенны судна-на- блюдателя до центра отражения судна-цели. Реальные расстояния между ближайшими оконечностями судов будут меньше в зависимости от длин судов, ситуации встречи и места установки антенны. Поэтому в Озад обычно включают длину судна-наблюдателя AD=L. В примерах этого параграфа принимается £ = 0,1 мили.
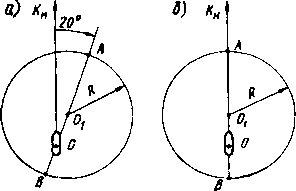
В общем случае ЭъгА представляет собой окружность радиусом R, центр которой нё совпадает с центром судна-наблюдателя вследствие следующих причин: большей относительной скорости опасных целей на носовых курсовых углах; увеличения относительной скорости целей на носовых курсовых углах правого борта при повороте вправо.
Если имеется возможность дополнительного маневра курсом, то центр Озад лежит на </=20° пр/б, причем (рис. 19.30,а):
(19.3)
ОВ = (Уц—Ун) gQ (0,3 7*9#Д/Инф) -I- ADHp-| L, если
ОВ = Д£)|<р L, если
где Где — время поворота судна на 90° при скорости Vn и соответствующих значениях глубины, ветра и волнения.
Если вследствие наличия потенциально опасных судов или навигационных опасностей дополнительный маневр курсом невозможен, то центр Озал лежит на <7==0°, причем (рис. 19.30,6)
0/4
= 25„ ;-(К11
|-К„) —-!-АРкр-|-1. (19.4)
где S,. — длина тормозного пути судна при скорости W
Нели условия плавания таковы, что выбрать маневр по расхождению с другими судами на расстоянии DKp^D3SiA невозможно (наличие эхо--сигналов нескольких судов, наличие навигационных опасностей н т. д.), необходимо уменьшить радиус опасной зоны, снизив скорость судна. Вывод о том, что понятия «опасное сближение» и «безопасная скорость» взаимно связаны, совершенно бесспорен и чрезвычайно важен. Чем с большей скоростью идет судно при пониженной видимости, тем большей следует считать и величину опасной зоны. В отечественной и зарубежной литературе часто за величину опасной зоны принимали 2 мили независимо от скорости и других соображений. Однако это не гарантирует безопасности для судов, идущих с большими скоростями в открытом море в случае неудачного маневрирования и наоборот, противоречит практике расхождения судов на значительно меньших чем 2 мили расстояниях при плавании в стесненных условиях. Правда, в последнем случае суда должны резко уменьшать скорость (S, — уменьшается) и вести основное наблюдение на шкалах крупного масштаба (Л/циф и Л01ф меньше).
Пример 4. Крупнотоннажное судно идет в открытом море со скоростью V'«*= = 12 y:t в условиях ограниченной видимости. Время поворота на 90° при этой скоро- С1И 7*во**4 мин. Определить безопасные дистанции расхождения с целью Vu=15 уз, если ЛОД цели проходит: а) по носу, б) справа, в) слева, г) по корме.
Решение.
ОЛ = (12-Н5)-^--(0,8-44-3)4-0,4-J-0,1 =3,3 мили;
60
ОВ^= (15— 12)~j-(0,3*4-h3) + 0,44-0,1 ^=0,7 мили.
Построив окружность £эйд, получаем:
я) 3.3 мили; б) 2,4 мили; в) 1,6 мили; г) 0,7 мили.
Пример 5. Для условий предыдущего примера найти А»»д, если дополнительное изменение курса невозможно. Тормозной путь судна при скорости 12 уз Se=*l.l мили. P е ш е и и е. ОВ =0,7 мили (см. пример 4).
ОА “2-1, Н- -—^—3-|-0,4-1-0,1 — 4,0 мили.
Построив окружность /)аад, получаем:
а) 4,0 мили; б) 2,4 мили; в) 2,4 мили; г) 0,7 мили.
Пример 6. Для условий предыдущего примера определить безопасную скорость, с.ш ио условиям плавания возможно расхождение со встречными судами в дистанции не более 1,5 мили. Построить окружность D»**.
Р е ш с II и е. Радиус окружности принимаем равным 1,5 мили:
л ОА + ОВ , в
R — «1,5 мили.
2
ОIскин ОА - 2R-OB ^3,0—0,7-2,3 мили.
1 I 12-}-15 ^—~{ОА — ADa— AD3— AD4) ----- 1 ° °
4(2.3_J2±!L3-o.4_o..)~
\ 60 !
В первом приближении, довольно близком к действительности, можно принять, что^тормозной путь судна пропорционален квадрату его начальной скорости, т. е.
“ = W*
Отсюда Vhi-12 «5,3 уз.
В этих условиях безопасная скорость Уя*5,3 уз.
5,3+15 1
Тогда ОЛ—2-0,22+ —gg—3+0,4+0,1 *1,9 мили; ОБ» (15—5,3) -gg (0,3-4 + 3) +0,4+
+0,1 —1,2 мили.
Построив окружность /)аад, получаем: а) 1,9 мили; б) 1,5 мили; в) 1,5 мили; г) 1,2 мили.
Рассчитанные значения Озад являются ориентировочными, поскольку учитывают не все факторы, влияющие на ее величину. Так, например, если радиолокационное наблюдение вблизи судна (1-нЗ мили) затруднено или невозможно из-за помех от морского волнения, дистанция расхождения должна по возможности быть больше зоны помех.
На величину безопасной скорости также влияет целый ряд факторов, не учитываемых в примере 6 (см. Правило 6). В частности, наличие впереди траверза зоны, в которой затруднено или невозможно своевременное обнаружение целей (зона дождя, теневые секторы от деталей своего судна или от близко идущих судов-сателлитов и т.д.), может потребовать существенного снижения скорости судна.
Контрольные вопросы. 1. Какие разделы правил плавания и маневрирования МППСС*72 действуют при ограниченной видимости? 2. Какие ограничения свойственны радиолокационной информации? 3. Каким образом осуществляется прогнозирование последствий маневра своего судна и (или) цели? 4. Приведите примеры ситуаций, когда потенциально опасное судно повлияло на величину маневра, на вид маневра и на время начала маневра. 5. Какими способами может учитываться инерция судна при расхождении изменением скорости? 6. Каковы особенности решения задачи расхождения судов по данным РЛС при плавании в системе разделения движения или при пересечении полосы движения?