

7. Исходные данные для выполнения лабораторной работы
Таблица 1
|
№ п/п |
Тип формирующего элемента |
|
№ п/п |
Тип формирующего элемента |
|
|
1 |
Нулевого порядка |
8 |
25 |
Первого порядка |
8 |
|
2 |
Нулевого порядка |
10 |
26 |
Первого порядка |
10 |
|
3 |
Нулевого порядка |
11 |
27 |
Первого порядка |
11 |
|
4 |
Нулевого порядка |
12 |
28 |
Первого порядка |
12 |
|
5 |
Нулевого порядка |
13 |
29 |
Первого порядка |
13 |
|
6 |
Нулевого порядка |
14 |
30 |
Первого порядка |
14 |
|
7 |
Нулевого порядка |
15 |
31 |
Первого порядка |
15 |
|
8 |
Нулевого порядка |
6 |
32 |
Первого порядка |
6 |
|
9 |
Нулевого порядка |
4 |
33 |
Первого порядка |
4 |
|
10 |
Нулевого порядка |
8,5 |
34 |
Первого порядка |
8,5 |
|
11 |
Нулевого порядка |
9,5 |
35 |
Первого порядка |
9,5 |
|
12 |
Нулевого порядка |
10,5 |
36 |
Первого порядка |
10,5 |
|
13 |
Нулевого порядка |
11,5 |
37 |
Первого порядка |
11,5 |
|
14 |
Нулевого порядка |
12,5 |
38 |
Первого порядка |
12,5 |
|
15 |
Нулевого порядка |
13,5 |
39 |
Первого порядка |
13,5 |
|
16 |
Нулевого порядка |
14,5 |
40 |
Первого порядка |
14,5 |
|
17 |
Нулевого порядка |
15,5 |
41 |
Первого порядка |
15,5 |
|
18 |
Нулевого порядка |
16 |
42 |
Первого порядка |
16 |
|
19 |
Нулевого порядка |
16,5 |
43 |
Первого порядка |
16,5 |
|
20 |
Нулевого порядка |
17 |
44 |
Первого порядка |
17 |
|
21 |
Нулевого порядка |
17,5 |
45 |
Первого порядка |
17,5 |
|
22 |
Нулевого порядка |
18 |
46 |
Первого порядка |
18 |
|
23 |
Нулевого порядка |
19 |
47 |
Первого порядка |
19 |
|
24 |
Нулевого порядка |
20 |
48 |
Первого порядка |
20 |
Лабораторная работа № 7 Определение амплитудно-фазовых характеристик (афх) дискретных систем
1. Цель работы
Целью работы является:
- обоснование методов определения АФХ дискретных систем;
- построение виртуальных моделей устройств определения АФХ дискретных систем;
- экспериментальное определение АФХ дискретных систем;
- исследование частотных характеристик дискретных систем в пакете Control System Toolbox.
2. Частотные характеристики дискретных систем
Частотные характеристики дискретных систем, так же как и частотные характеристики непрерывных, широко используются при теоретических и экспериментальных исследованиях систем автоматического регулирования. По ним определяется устойчивость, оценивается качество переходных процессов и можно выбрать корректирующие устройства.
Используя
критерий Найквиста можно определить
устойчивость непрерывных САР по АФХ
разомкнутой системы
![]() .
Согласно этому критерию непрерывная
система, устойчивая в разомкнутом
состоянии, будет устойчива и в замкнутом
состоянии, если АФХ разомкнутой системы
не охватывала точку
.
Согласно этому критерию непрерывная
система, устойчивая в разомкнутом
состоянии, будет устойчива и в замкнутом
состоянии, если АФХ разомкнутой системы
не охватывала точку![]() при измененииω
от 0 до ∞. Этот же критерий можно применить
и при исследовании дискретных систем,
определив АФХ дискретной системы через
АФХ непрерывной системы
при измененииω
от 0 до ∞. Этот же критерий можно применить
и при исследовании дискретных систем,
определив АФХ дискретной системы через
АФХ непрерывной системы
![]()
![]() , (1)
, (1)
где
![]() - АФХ непрерывной и дискретной систем,
соответственно.
- АФХ непрерывной и дискретной систем,
соответственно.
Так
как АФХ импульсной системы является
периодической функцией частоты
![]() ,
то для анализа устойчивости импульсной
САР необходимо рассматривать АФХ только
для частотного диапазона от 0 до
,
то для анализа устойчивости импульсной
САР необходимо рассматривать АФХ только
для частотного диапазона от 0 до![]() .
При подаче на вход дискретной системы
круговой частоты, например
.
При подаче на вход дискретной системы
круговой частоты, например![]() ,
система, будет реагировать на комбинацию
частот:
,
система, будет реагировать на комбинацию
частот:![]() и
т.д.
и
т.д.![]() и т.д.
и т.д.
Таким образом, один вектор АФХ импульсной системы может быть построен по нескольким векторам АФХ непрерывной системы.
 . (2)
. (2)
Следовательно,
чтобы получить одну точку АФХ дискретной
системы для частоты
![]() необходимо определить ряд векторов АФХ
непрерывной системы для частот
необходимо определить ряд векторов АФХ
непрерывной системы для частот![]() ,
,![]() ,
,![]() ,
…,
,
…,![]() ,
,![]() ,
а затем полученные вектора просуммировать.
Так как
,
а затем полученные вектора просуммировать.
Так как![]() ,
то для ряда векторов АФХ непрерывной
системы определяется при отрицательных
значениях частот.
,
то для ряда векторов АФХ непрерывной
системы определяется при отрицательных
значениях частот.
Так
как с возрастанием частоты амплитуда
![]() стремится к нулю, то в выражении (2)
присутствуют конечное число слагаемых.
В значительной степени убывание
составляющих выражения (2) определяется
частотными свойствами непрерывной
системы и частотой прерывания
стремится к нулю, то в выражении (2)
присутствуют конечное число слагаемых.
В значительной степени убывание
составляющих выражения (2) определяется
частотными свойствами непрерывной
системы и частотой прерывания![]() .
В большинстве случаев без большой потери
точности АФХ дискретной системы можно
аппроксимировать первыми тремя членами,
образующими выражение (2).
.
В большинстве случаев без большой потери
точности АФХ дискретной системы можно
аппроксимировать первыми тремя членами,
образующими выражение (2).
Из
сказанного видно, что устройство для
определения АФХ импульсных систем
состоит из нескольких устройств,
определяющих АФХ непрерывной
системы.
Причем,
одно
устройство определяет частотные
характеристики непрерывной системы на
частое
![]() ,
второе устройство - на частоте
,
второе устройство - на частоте![]() ,
третье – на частоте
,
третье – на частоте![]() ,
и т. д.
,
и т. д.
Как известно проекции векторов, по которым строятся частотные характеристики непрерывных систем, определяются путем реализации нижеприведенных выражений
 (1.1)
(1.1)
 (2.1)
(2.1)
где
![]() - это стационарная реакция системы на
синусоидальное воздействие.
- это стационарная реакция системы на
синусоидальное воздействие.
Согласно выражениям (1.1) и (2.1) на рис. 1 приведена, с использованием блоков MatLab, структурная схема устройства по
определению
АФХ непрерывной системы. Устройство
содержит: 1 - блок задающего сигнала; 2 –
исследуемую систему, заданную передаточной
функцией; 3,4 - блоки умножения, определяющие
произведение согласно подынтегральным
выражениям (1) и (2); 5 - блок задания
коэффициента -
![]() ;
6,7 – блоки, определяющие периоды тестового
сигнала; 8,9 - пороговые устройства,
определяющие период интегрирования;
10 - логический блок; 11,12 - интеграторы;
13,14 – блоки, фиксирующие результаты
измерения; 15 - блок формирования
косинусного сигнала.
;
6,7 – блоки, определяющие периоды тестового
сигнала; 8,9 - пороговые устройства,
определяющие период интегрирования;
10 - логический блок; 11,12 - интеграторы;
13,14 – блоки, фиксирующие результаты
измерения; 15 - блок формирования
косинусного сигнала.
Настройки
блоков определяются выражениями (1.1) и
(2.1). Блок 1 задает частоту
![]() и амплитуду A тестового сигнала. Так как
АФХ строится как отношение выходного
сигнала к входному сигналу, то для
упрощения расчетов принимаем, что
и амплитуду A тестового сигнала. Так как
АФХ строится как отношение выходного
сигнала к входному сигналу, то для
упрощения расчетов принимаем, что![]() .
Косинусный сигнал (блок 15) получают из
блока 1 путем изменения его настроек
(вводом фазового сдвига pi/2). В блоках
6-10 выставляется время, кратное периоду
тестового сигнала, что бы исключить не
стационарные процессы. Для исследуемого
звена время задержки составляет 6
периодов. Блок 5 задает коэффициент,
стоящий перед интегралом Фурье.
.
Косинусный сигнал (блок 15) получают из
блока 1 путем изменения его настроек
(вводом фазового сдвига pi/2). В блоках
6-10 выставляется время, кратное периоду
тестового сигнала, что бы исключить не
стационарные процессы. Для исследуемого
звена время задержки составляет 6
периодов. Блок 5 задает коэффициент,
стоящий перед интегралом Фурье.

Рис.1. Структурная схема устройства по определению АФХ непрерывной системы с определением периода интегрирования
На
рис.2 представлена структурная схема
устройства для определения проекций
АФХ дискретных систем на действительную
ось для
![]() Это устройство состоит из трех подсистем,
в которых определяются проекции
Это устройство состоит из трех подсистем,
в которых определяются проекции
АФХ
непрерывных систем на действительную
ось для трех частот:
![]()
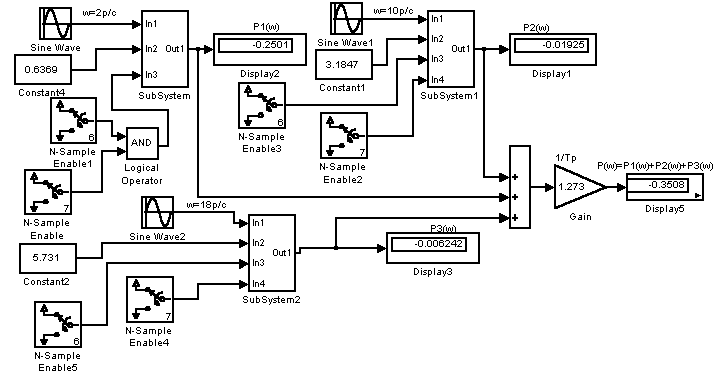
Рис.2. Структурная схема устройства для определения проекций АФХ дискретной системы на действительную ось при n>0.(ω=2р/с; ωП=10р/с; ω=18p/c) (Dis_02.mdl)
Каждая подсистема выполнена по структурной схеме рис.1. Подсистемы отличаются только параметрами настройки, определяемые частотой тестируемого сигнала. Исходные данные для АФХ дискретной системы получается суммированием проекций АФХ непрерывной системы на действительную ось.
На
рис.3 представлена структурная схема
устройства для определения проекций
АФХ дискретных систем на мнимую ось для
![]() Это устройство отличается от схемы
рис.2 введением добавочных блоков,
формирующих косинусоидальный сигналы.
Это устройство отличается от схемы
рис.2 введением добавочных блоков,
формирующих косинусоидальный сигналы.

Рис.3 Структурная схема устройства для определения проекций АФХ дискретной системы на мнимую ось при n≥0 (ω=2р/с; ωП=8р/с; ω=18p/c) (Dis_03.mdl)
Исходные данные для АФХ дискретной системы получается суммированием проекций АФХ непрерывной системы на мнимую ось.
Так
как всегда ωП
> ω, то при n<0 аргумента функции W(jω)
принимает отрицательные значения.
Учитывая, что
![]() четная
функция, то изменение знака аргумента
не изменяет знака функции и для определения
проекций АФХ дискретной системы на
действительную
ось
при n<0 используется устройство рис.2,
в котором изменены тестовые сигналы
(ω=6;ω=14;ω=22) и, как следствие этого, изменены
параметры настройки устройства.
четная
функция, то изменение знака аргумента
не изменяет знака функции и для определения
проекций АФХ дискретной системы на
действительную
ось
при n<0 используется устройство рис.2,
в котором изменены тестовые сигналы
(ω=6;ω=14;ω=22) и, как следствие этого, изменены
параметры настройки устройства.
При определении проекций АФХ дискретной системы на мнимую ось при n<0 используется устройство рис.3, в котором, во-первых, изменены частоты тестовых сигналов (ω=6;ω=14; ω=22), а во-вторых, изменены настройки косинусного блока. При определении мнимой составляющей АФХ дискретной системы (n>0) в блоке Sine Wave в параметрах настройки фазы установлено pi/2, а при n < 0 параметр настройки фазы в этом блоке будет задан со знаком минус.
Таким
образом, для определения действительной
составляющей вектора АФХ дискретной
системы на одной частоте
![]() при
при![]() необходимо в структурной схеме (рис.2)
выполнить следующие операции:
необходимо в структурной схеме (рис.2)
выполнить следующие операции:
- в
генераторах тестовых сигналов задать
частоты
![]()
- в соответствии с заданными частотами ввести новые константы в блоки Constant и блоки N-Sample Enable;
- определить проекции вектора АФХ дискретной системы на действительную ось при n>0;
Для
определения мнимой составляющей вектора
АФХ дискретной системы на одной частоте
![]() (
(![]() )
необходимо использовать структурную
схему рис.3 и выполнить операции,
перечисленные при определении
действительной составляющей вектора
АФХ дискретной системы. Вышеперечисленные
действия позволяют определить только
часть проекций вектора АФХ дискретной
системы на действительную и мнимую ось
при
)
необходимо использовать структурную
схему рис.3 и выполнить операции,
перечисленные при определении
действительной составляющей вектора
АФХ дискретной системы. Вышеперечисленные
действия позволяют определить только
часть проекций вектора АФХ дискретной
системы на действительную и мнимую ось
при![]()
При
![]() определяются вторые части составляющих
векторов АФХ дискретной системы. Для
определения действительных составляющих
векторов АФХ следует:
определяются вторые части составляющих
векторов АФХ дискретной системы. Для
определения действительных составляющих
векторов АФХ следует:
- в
устройстве рис.2 изменить частоты в
генераторах тестовых сигналов согласно
выражениям
![]()
- в соответствии с новыми частотами ввести новые константы в блоки Constant и блоки N-Sample Enable;
- определить проекции вектора АФХ дискретной системы на действительную ось при n<0;
- определить сумму, определяемую проекциями векторов АФХ дискретной системы на действительную ось при n>0 и при n<0;
Определение проекций вектора АФХ дискретной системы на мнимую ось при n<0 осуществляется с помощью устройства, представленного на рис.3. Для этого следует:
- в
устройстве рис.3 изменить частоты в
генераторах тестовых сигналов согласно
выражениям
![]()
- в соответствии с новыми частотами ввести новые константы в блоки Constant и блоки N-Sample Enable;
- в блоках Sine Wave, формирующие косинусоидальный составляющие опорных сигналов, применить настройку фазы –(-pi/2);
- определить проекции вектора АФХ дискретной системы на действительную ось при n<0;
- определить сумму, определяемую проекциями векторов АФХ дискретной системы на мнимую ось при n>0 и при n<0;
Таким образом, сумма двух измерений устройства рис.2, определяет проекцию вектора АФХ дискретной системы на действительную ось, а сумма двух измерений устройства рис.3 определяет проекцию вектора АФХ дискретной системы на мнимую ось.
Используя вышеприведенный алгоритм, определяется только одна точка АФХ дискретной системы. Для определения второй точки необходимо изменить частоту тестового сигнала, пересчитать параметры устройств и провести измерения, используя вышеописанный алгоритм.
Частотные характеристики непрерывных и дискретных систем можно получить не только экспериментальным, но и теоретическим путем. В пакете Control System Toolbox имеется возможность строить частотные характеристики систем в обычном и логарифмическом масштабах.
%Программа1
%Исследование частотных характеристик дискретных систем.
h=tf(1,[0.5,1,0]); %Исходные данные, заданные в форме TF.
wp=8; %Частота дискретизации.
t=2*pi/wp; %Интервал дискретности.
hd=c2d(h,t); %Преобразование непрерывной передаточной
%функции в дискретную.
figure(1) %Построение логарифмических характеристик
bode(h,hd),grid on %непрерывной и дискретной систем.
figure(2) %Построение АФХ характеристик
nyquist(h,hd),grid on %непрерывной и дискретной систем.