

ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТЕМА.3 Принципы автоматического управления

Содержание
ВВЕДЕНИЕ.
Классификация САУ. Принципы автоматического управления
1. ЛИНЕЙНЫЕ САУ
1.1. Линеаризация элементов САУ. Преобразование Лапласа, передаточ-
ные функции. Типовые воздействия и реакция на них
1.2. Методы расчета переходных процессов, функции веса и построения
графиков переходных процессов
ВВЕДЕНИЕ
Классификация САУ. Принципы автоматического управления
Теория автоматического управления (ТАУ) - это наука о принципах построения и методах расчётов систем автоматического управления (САУ). САУ в самом общем виде имеют следующую обобщенную структурную схему:
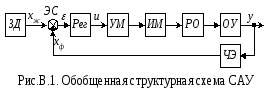
Задатчиком (ЗД)задается желаемый закон изменения сигналаxж . Все остальные элементы САУ должны работать так, что бы фактический сигналхф, который пропорционален выходному сигналуyобъекта управления(ОУ)повторял закон изменения входного сигналаxжс заданными показателями качества, такими какошибка, время регулированияи т.д.
Чувствительный элемент (ЧЭ)преобразует выходной сигналy объекта управления к видухф, в котором представлен сигналxж, например, при электрическом сигналехжсигналхфтакже электрический.
Элемент сравнения (ЭС) служит для формирования сигнала ошибки регулированияε, равного разности желаемогохжи фактическогохфзначений сигналов САУ.
Регулятор (Рег)- ключевой элемент САУ, который выполняет такие преобразования сигнала, при которых обеспечиваются требуемые показатели качества регулирования.
В САУ также обычно используются: усилитель мощности (УМ), исполнительный механизм (ИМ), и регулирующий орган (РО),предназначенные для того, чтобы преобразовывать маломощный сигнал регулятора в мощный сигнал, действующий наОУ.
Классификация САУ
Системы автоматического управления (САУ) достаточно разнообразны, однако они поддаются четкой классификации по следующим признакам:
1. По виду уравнений статики и динамики, описывающих процессы управления: линейные и нелинейные.
2. По закону изменения входного сигнала x:
- системы автоматической стабилизации(x=const);примеры: САР частоты вращения дизеля; система автоматической стабилизации напряжения судовой сети САУ курсом судна в режиме "Автомат";
- системы программного управления(закон измененияxзаранее известен); пример: САР стерилизации консервов в автоклаве;
- следящие системы(xизменяется по произвольному закону); пример: САУ курсом судна в режиме "Следящий".
3. По виду используемого регулятора:
- линейные, нелинейные, импульсные и цифровые САУ.
4. По общему алгоритму функционирования:
- обычные САУ; оптимальные и адаптивные САУ.
Принципы автоматического управления
Основополагающими понятиями САУ являются:
- структурная схема САУ и динамические характеристики звеньев САУ;
- состав и характеристики входных сигналов, которые подразделяются на сигналы управления и сигналы возмущения;
- совокупность показателей качества регулирования выходного сигнала.
Все многообразие САУ может быть сведено к 3-м элементарным схемам управления, называемыми также принципами управления: прямое управление, управление по возмущению, управление по отклонению.
1.2.1. Принцип прямого управления (рис.В.2)
САУ с прямым
управлением содержит ОУ(на рис.В.2
под объектом управления понимается
совокупностьУМ+ИМ+РО+ОУ+ЧЭиз
элементов рис.В.1) и регулятор. НаОУиРегдействуют возмущающие сигналыg1,…,g6,
изменяющие произвольным образом и
которые ведут к непредсказуемым
изменениям их выходных сигналовииу. За выходным сигналомyследит
человек-оператор, который вручную
изменяет сигналxтак, чтобы достичь
заданных значений сигналаy. Сигналы
возмущенияg1..g6
человеком не контролируются.
Данная САУ называется также САУ разомкнутого типа, чем подчеркивается то обстоятельство, что выходной сигналуне используется техническими средствами автоматизацииУМ, ИМ, РО, ОУ, ЧЭ и Регв формировании сигнала заданиях и управления объектом.
Достоинства: Предельная простота регулятора.
Недостатки:1. Обязательное присутствие человека- оператора, который является наиболее ненадежным звеном САУ.
2. Малая точность регулирования, особенно в динамике, когда сигналы х,g1, ..., g6 быстро изменяются.
3. Невысокое быстродействие, обусловленное медленной реакцией человека на изменения сигнала у.
Пример: Электропривод якорно-швартового устройства. Оператор с помощью соответствующих органов управления задаёт одну из фиксированных скоростей вращения двигателя. Сигналами возмущенияg1..g6 являются: натяжение якорной цепи, напряжение питания электродвигателя, температура обмоток двигателя и др.
1.2.2. Принцип управления по возмущению (рис.В.3)
В САУ некоторые из
сигналов возмущения, например g1,
g4 иg6 ,
которые можно измерить и преобразовать
в электрический сигнал (принимаем
регулятор электрическим), заводятся на
вход регулятора через сумматорСм.Это приводит к такому изменению выходного
сигнала регулятораu, при котором
компенсируется действие на систему
измеренных сигналов возмущения.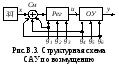
Достоинства:1. Наивысшее быстродействие в сравнении быстродействием с другими типов САУ.
2. Выше точность регулирования в сравнении с прямым управлением.
3. Выше надежность регулирования, так как человек не участвует непосредственно в управлении объектом.
Недостатки:1. Сложность выделения всех возмущений, действующих на элементы САУ.
2. Сложность их классификации на основные и второстепенные.
3. Сложность измерения и преобразования сигналов возмущения в электрический сигнал. Например, чрезвычайно сложной на практике является задача измерения механического момента в валах вращающихся механизмов.
Пример: САР напряжения генератора (система токового компаундирования). Регулируемый сигнал – напряжение на выводах генератора. Возмущающий сигнал – ток нагрузки генератора, который измеряется просто трансформатором тока.
1.2.3. Принцип управления по отклонению (рис.В.4)
Вводится цепь
отрицательной обратной связи ООСи элемент сравненияЭС, на котором
вычитаются заданное значениеxи
фактическое значениеyрегулируемого
сигнала. ВЭС формируется ошибка
регулирования. РегуляторРегвырабатывает такой сигналu, который
уменьшает ошибку регулирования.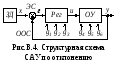
Достоинства:1. Нет необходимости в выяснении того, какие сигналы возмущения действуют на САУ, и, следовательно, не нужно их измерять.
2. Самая высокая точность регулирования в сравнении с другими схемами САУ.
Недостатки: Меньше в сравнении с управлением по возмущению быстродействие, т.к. регулирующий сигналuначинает изменяться не в момент появления возмущений, а только после измененияy.
Примеры:
1. Авторулевой, удерживающий судно на заданном курсе с требуемой точностью в условиях волнения моря и других возмущающих сигналах.
2 .Электропривод траловой лебедки, обеспечивающий требуемые усилия и скорость выборки трала в условиях переменной нагрузки на ваерах, волнения моря, действия течений.
3. Холодильная автоматика, обеспечивающая поддержание заданной температуры в камерах в условиях изменяющегося притока тепла.
Достоинства схемы управления по отклонению настолько велики, что САУ в подавляющем числе случаев выполняются работающими именно по этой схеме.
На практике применяют также комбинированные САУ, сочетающие регулирование как по возмущению (рис.В.3), так и по отклонению (рис.В.4), которые обладают достоинствами обоих типов САУ.