

-
Робота сил поля тяжіння. Потенціал
Я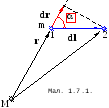 кщо
тіло переміщується під дією сили тяжіння,
то при цьому виконується робота. Давайте
знайдемо роботу сил тяжіння при русі
матеріальної точки масою
кщо
тіло переміщується під дією сили тяжіння,
то при цьому виконується робота. Давайте
знайдемо роботу сил тяжіння при русі
матеріальної точки масою
![]() у полі тяжіння, створеного точковою
масою
у полі тяжіння, створеного точковою
масою
![]() .
При елементарному переміщенні на
величину
.
При елементарному переміщенні на
величину
![]() (Мал. 1.7.1) робота складатиме:
(Мал. 1.7.1) робота складатиме:
|
|
(1.7.15) |
де
![]()
![]() =
=![]() ,
знак „-” вказує на те, що напрям сили
тяжіння протилежний напряму радіуса-вектора
,
знак „-” вказує на те, що напрям сили
тяжіння протилежний напряму радіуса-вектора
![]() рухомої точки
рухомої точки
![]() .
Роботу сил тяжіння при переміщенні тіла
з точки 1
в точку 2,
радіуси яких
.
Роботу сил тяжіння при переміщенні тіла
з точки 1
в точку 2,
радіуси яких
![]() і
і
![]() :
:
|
|
(1.7.16) |
Отже,
з (1.7.16) видно, що робота сил тяжіння не
залежить від форми шляху. Сили
тяжіння – консервативні, або потенціальні.
Якщо
![]() ,
то тіло
,
то тіло
![]() віддаляється від тіла
віддаляється від тіла
![]() як джерела поля тяжіння і робота
як джерела поля тяжіння і робота
![]() .
Отже, робота виконується проти сил
тяжіння. Якщо ж
.
Отже, робота виконується проти сил
тяжіння. Якщо ж
![]() ,
то тіло
,
то тіло
![]() наближається до джерела
наближається до джерела
![]() і
і
![]() ,
тобто сили поля тяжіння виконують
додатну роботу.
,
тобто сили поля тяжіння виконують
додатну роботу.
Оскільки сили тяжіння консервативні, то виконана цими силами робота переміщення тіла в полі тяжіння дорівнює зміні потенціальної енергії тіла:
|
|
(1.7.17) |
При
переміщенні матеріальної точки
![]() з нескінченості на відстань
з нескінченості на відстань
![]() від тіла масою
від тіла масою
![]() ,
потенціальна енергія точки буде:
,
потенціальна енергія точки буде:
|
|
(1.7.18) |
При
такому вигляді формули (1.7.18) потенціальна
енергія двох матеріальних точок, що
взаємодіють, завжди від’ємна і зростає
при збільшенні відстані між ними. Якщо
ж ми поділимо ліву і праву частину
(1.7.18) на масу тіла
![]() ,
то отримаємо величину:
,
то отримаємо величину:
|
|
(1.7.19) |
яка
не залежить від маси
![]() ,
а залежить тільки від маси
,
а залежить тільки від маси
![]() і відстані від цього тіла до точки поля
– потенціал
поля
і відстані від цього тіла до точки поля
– потенціал
поля
![]() тяжіння – скалярна
величина.
Потенціал є енергетичною
характеристикою
поля тяжіння. Враховуючи поняття
потенціалу:
тяжіння – скалярна
величина.
Потенціал є енергетичною
характеристикою
поля тяжіння. Враховуючи поняття
потенціалу:
|
|
(1.7.20) |
де
![]() і
і
![]() - потенціали точок 1
і 2.
Потенціал точки поля тяжіння, створеного
системою матеріальних точок, визначається
алгебраїчним сумуванням.
- потенціали точок 1
і 2.
Потенціал точки поля тяжіння, створеного
системою матеріальних точок, визначається
алгебраїчним сумуванням.
Оскільки потенціал величина скалярна, завжди існують поверхні, точки яких мають однакові потенціали – це еквіпотенціальні поверхні.
У
зв’язку з тим, що напруженість і потенціал
являють собою характеристики одного і
того самого поля, то між ними повинен
існувати зв’язок. Продиференцюємо по
![]() :
:
|
|
(1.7.21) |
Вираз для напруженості гравітаційного поля з урахуванням (1.7.21) перепишемо так:
|
|
(1.7.22) |
Величина
![]() =
=![]() - це одиничний вектор, який незалежно
від вибору нульового потенціалу завжди
напрямлений у бік зростання потенціалу.
У векторному аналізі величину
- це одиничний вектор, який незалежно
від вибору нульового потенціалу завжди
напрямлений у бік зростання потенціалу.
У векторному аналізі величину
![]()
![]() називають градієнтом
потенціалу:
називають градієнтом
потенціалу:
|
|
(1.7.23) |
– зв’язок напруженості і потенціалу гравітаційного поля.
Про рішення задачі двох тіл, на прикладі пружного та не пружного співударів ви дізнаєтеся самостійно з підручників [4,6,7-9], та під час виконання лабораторного практикуму з фізики.
Прикладом центрального поля тяжіння є поле, що створюється нерухомою матеріальною точкою.
Давайте
розглянемо рух тіл у центральному поля
тяжіння. До таких рухів належать рухи
планет Сонячної системи. При цьому Сонце
і планети вважають матеріальними
точками. Спростимо ще задачу. Розглянемо
рух тіл у центральному полі тяжіння,
застосувавши закон збереження енергії.
Якщо тіло масою
![]() рухається у центральному полі, створеному
джерелом поля масою
рухається у центральному полі, створеному
джерелом поля масою
![]() ,
то його повна енергія визначатиметься
так:
,
то його повна енергія визначатиметься
так:
|
|
(1.7.24) |
Момент
імпульсу тіла масою
![]() буде:
буде:
|
|
(1.7.25) |
З
означення центрального поля випливає,
що сила, яка діє на рухому в ньому
матеріальну точку, завжди проходить
через центр поля. при цьому плече сили
відносно центра поля дорівнюватиме
нулю. Отже, момент імпульсу тіла масою
![]() є величина стала:
є величина стала:
|
|
(1.7.26) |
д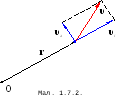 е
е
![]() =
=![]() - кутова швидкість. Повну швидкість руху
- кутова швидкість. Повну швидкість руху
![]() тіла можна розкласти на радіальну
тіла можна розкласти на радіальну
![]() та азимутальну
та азимутальну
![]() =
=![]() складові (Мал.1.7.2). Тоді кінетичну енергію
тіла перепишемо у наступному вигляді:
складові (Мал.1.7.2). Тоді кінетичну енергію
тіла перепишемо у наступному вигляді:
|
|
(1.7.27) |
Повна енергія:
|
|
(1.7.28) |
Оскільки в цьому рівнянні тільки перший доданок залежить від швидкості, то роль потенціальної енергії відіграє функція:
|
|
(1.7.29) |
Давайте тепер знайдемо умови, при яких траєкторія руху тіла стане еліптичною, тобто коли рух тіла буде обмежений у деякій області простору. Такий рух ще називають фінітним. Для розв’язання цієї задачі застосуємо графічний метод. На малюнку 1.7.3 штрихованою лінією наведемо графіки функцій:
|
|
(1.7.30) |
Суцільною
лінією наведемо графік функції
![]() ,
як результат додавання ординат функцій
,
як результат додавання ординат функцій
![]() і
і
![]() .
З Мал. 1.7.3 видно, що для
.
З Мал. 1.7.3 видно, що для
![]() функція
функція
![]() додатна і при
додатна і при
![]() асимптотично наближається до
асимптотично наближається до
![]() .
Для значень
.
Для значень
![]() функція
функція
![]() від’ємна і при
від’ємна і при
![]() вона асимптотично наближається до нуля.
вона асимптотично наближається до нуля.
Оскільки
величина
![]() завжди додатна, то межі області, в якій
може перебувати тіло, визначаються
умовою
завжди додатна, то межі області, в якій
може перебувати тіло, визначаються
умовою
![]()
![]()
![]() .
Проведемо на Мал. 1.73 прямі
.
Проведемо на Мал. 1.73 прямі
![]() =
=![]() =
=![]() для випадку, коли
для випадку, коли
![]()
![]()
![]() і
і
![]()
![]()
![]() .
.
У першому випадку ділянки кривої
першому випадку ділянки кривої
![]() (
(![]()
![]()
![]() ),
що знаходяться над прямою, не можуть
бути досягнуті тілом з енергією
),
що знаходяться над прямою, не можуть
бути досягнуті тілом з енергією
![]() .
У другому випадку (
.
У другому випадку (![]()
![]()
![]() )
пряма перетинає криву
)
пряма перетинає криву
![]() у двох точках А
і В.
Їм відповідають радіуси
у двох точках А
і В.
Їм відповідають радіуси
![]() і
і
![]() .
Вони і визначають межі області, в якій
рухається тіло у центральному
гравітаційному полі. Саме у цьому разі
рух тіла буде обмеженим, тобто фінітним.
Траєкторія руху при цьому буде еліптичною.
.
Вони і визначають межі області, в якій
рухається тіло у центральному
гравітаційному полі. Саме у цьому разі
рух тіла буде обмеженим, тобто фінітним.
Траєкторія руху при цьому буде еліптичною.
Якщо
![]()
![]()
![]() ,
то пряма перетинає криву
,
то пряма перетинає криву
![]() тільки в одні точці, які відповідає
радіус
тільки в одні точці, які відповідає
радіус
![]() .
Якщо ж тіло рухається справа наліво, то
на відстані
.
Якщо ж тіло рухається справа наліво, то
на відстані
![]() його напрям руху зміниться на протилежний.
його напрям руху зміниться на протилежний.
Рух
тіла буде необмеженим, тобто ін фінітним,
а траєкторія - гіперболічною. Якщо
![]() =
=![]() ,
то рух тіла також буде необмеженим, а
траєкторія – параболічною.
,
то рух тіла також буде необмеженим, а
траєкторія – параболічною.
Всі наведені висновки можна повністю поширити на рух штучних супутників Землі та космічних кораблів. Про це ви дізнаєтеся самостійно з будь-якого підручника в переліку літератури.